HPC软件架构---Vector solution方案简介
我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。
老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师:
做到欲望极简,了解自己的真实欲望,不受外在潮流的影响,不盲从,不跟风。把自己的精力全部用在自己。一是去掉多余,凡事找规律,基础是诚信;二是系统思考、大胆设计、小心求证;三是“一张纸制度”,也就是无论多么复杂的工作内容,要在一张纸上描述清楚;四是要坚决反对虎头蛇尾,反对繁文缛节,反对老好人主义。
不觉间来到夏初六月,横坐在电脑前,敲击点文字,对自己也算一个时间的记忆,多年后再次点击,也期待那时会像触发记忆的闸口,让现在的这点岁月传递至那时那刻。

本文主要是针对OEM汽车中央控制单元开发项目,Vector提供全链路工具链与技术服务支持
在OEM汽车中央控制单元(HPC/域控制器)开发过程中,软件服务供应商的角色已从单一工具提供者向全生命周期合作伙伴演进。以Vector为例,其通过完整的工具链、标准化产品矩阵及专业化服务,深度覆盖从架构设计到系统测试的完整开发流程,助力OEM高效实现功能定义、软件实现与质量验证。以下从架构设计、ECU软件开发、测试验证三个核心环节展开介绍:
一、架构设计:从需求到落地的标准化支持
Vector提供从功能定义到软件架构落地的全流程工具与方法论,确保系统设计符合AUTOSAR标准与功能安全要求。
1、功能定义与需求管理
工具链

使用PREEvision工具实现功能需求(如自动驾驶感知、动力控制)的图形化建模,支持基于SysML的跨域需求追踪。
PREEvision功能具体如下:
-> 多层面建模,可在不同层面进行电子电气架构建模,涵盖拓扑、线束、电气逻辑、电力供应、功能网络、用户需求,以及各层面之间的映射关联。例如,在硬件系统架构方面,部件层描述组件内容及内部结构,网络层描述部件间逻辑连接方式,原理层赋予连接关系电势属性,逻辑层和原理层的连接关系在线束层实施,拓扑层描述系统实际布置情况。
-> 需求管理支持与其他层的模型元素链接和映射,可在需求文本内添加任意模型元素的信息引用,支持 ReqIF(Requirements Exchange Format)导入和导出,以及作为报告的 Excel 和 PDF 导出功能,实现需求数据的一致性与可追溯性。
-> 协同工作提供多人协同的工作环境,支持系统元素的抽象、分解和复用;对于多平台复杂车型的设计过程,提供变型管理、一致性校验、动态评估等一系列解决方案。
-> 架构评估,系统架构工程师可根据重量、成本、总线负载率、耐久性等一系列评价指标,评估不同架构方案的优劣,同时,通过对标工作得到的结论也能用于新的评价指标的制定,为进一步的架构优化提供参考。
-> 支持多种标准与协议,支持汽车行业标准(AUTOSAR、FIBEX、DBC、LDF、KBL、RIF 等),在已有开发环境中实现数据交换和整合;支持符合 AUTOSAR 标准的汽车以太网网络设计,支持采用基于信号的 AUTOSAR Classic 平台以及面向服务的 AUTOSAR Adaptive 平台,支持常见的以太网高层协议,如 SOME/IP 和 DoIP。
-> 功能安全支持通过集成设计和分析功能支持功能安全标准 ISO26262,跟踪安全相关的整个开发流程,提高安全相关系统的可追踪性。提供 HAZOP、HARA、FMEA、FMEDA 和 FTA 的编辑器、图表和模板,从系统设计、HARA、FMEA 和 FTA 到安全用例提供综合方法,在单一工具中对所有设计工件进行统一建模,为所有利益相关者提供透明度和可追溯性,支持自动化一致性检查,生成安全用例报告,提供可调整的安全计划模板。
服务化设计通过ARXML模板库快速定义SOA服务接口(如HVAC控制、传感器数据服务),实现功能与硬件的解耦。
比如某OEM在PREEvision中完成L2+自动驾驶功能的分层设计,将环境感知、决策规划与执行控制拆分为独立服务模块。
2、软件架构设计
AUTOSAR配置基于DaVinci Configurator Pro工具生成符合AUTOSAR Classic/Adaptive标准的软件架构,包括BSW模块配置、通信矩阵定义等。
安全架构设计集成MICROSAR Safe模块,提供ASIL D级功能安全支持,例如通过安全监控进程(SM)实时检测软件异常。
比如某新能源车企采用Vector工具链设计域控制器架构,实现动力域与底盘域的跨核通信(如MCU与MPU间的SOME/IP服务调用)。
3、通信设计
协议栈与总线设计,使用CANoe工具进行CAN/LIN/Ethernet通信矩阵设计,支持SOME/IP、DDS等面向服务的通信协议。
网络仿真通过vVIRTUALtarget实现虚拟ECU与真实网络的联合仿真,提前验证通信时序与负载。
某Tier 1在CANoe中完成车载以太网拓扑设计,优化了ADAS传感器数据传输的带宽利用率。
二、ECU软件开发:从M核到A核的跨平台支持
Vector提供的覆盖MCU(M核)与MPU(A核)的软件开发工具链,为汽车电子系统开发提供了从底层驱动到应用层的全栈支持,以下是对其M核和A核软件开发以及跨核通信与调度的详细介绍:
1、M核软件开发(AUTOSAR Classic)
基础软件(BSW)配置:通过DaVinci Configurator Pro工具,开发者可以生成符合AUTOSAR Classic标准的RTE(运行时环境)、OS(操作系统)、COM(通信)等模块代码。这些代码是ECU软件的基础,负责处理硬件抽象、通信协议栈、诊断服务等功能。
功能安全开发:Vector的MICROSAR Safe组件提供了看门狗管理、内存保护等ASIL D级安全机制,确保M核上的软件满足功能安全要求。例如,某OEM在M核上实现车身控制功能(如车窗、灯光)时,通过Vector工具链完成了ASIL B级功能安全认证。

2、A核软件开发(AUTOSAR Adaptive/POSIX)
Adaptive平台支持使用MICROSAR Adaptive工具链,开发者可以生成符合AUTOSAR Adaptive标准的ARA::COM(通信管理)、ARA::EXEC(执行管理)等模块代码。这些代码支持面向服务的架构(SOA),使得A核上的软件能够更灵活地部署和更新。
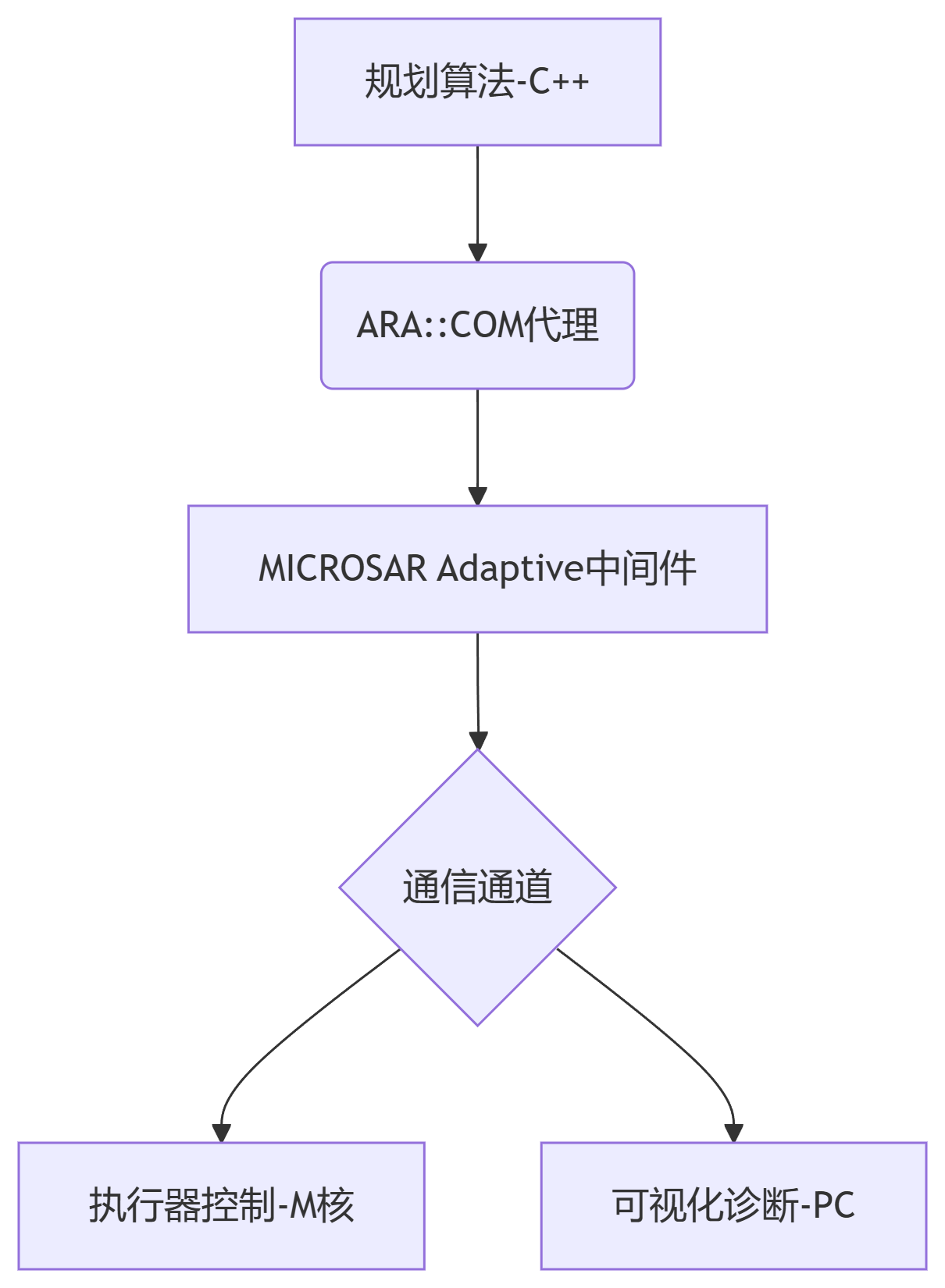
Linux/QNX集成方面,Vector提供了vVIRTUALtarget与vADASdeveloper工具,支持在POSIX操作系统(如Linux、QNX)下进行应用开发与调试。这些工具帮助开发者将算法与硬件解耦,提高开发效率和软件的可移植性。例如,某智能驾驶项目在A核上部署决策规划算法时,通过Vector工具链实现了算法与硬件的解耦。
3、跨核通信与调度
工具链支持Vector的SOME/IP配置工具实现了M核与A核间的服务发现与数据交互。通过ARA::COM接口,MCU的传感器数据可以被暴露给A核上的应用进行处理。这种跨核通信机制使得汽车电子系统能够更高效地利用计算资源。
实时性保障,结合vTESTstudio测试脚本,开发者可以验证跨核通信的时序与确定性。这对于自动驾驶等需要高实时性的应用至关重要。例如,某域控制器项目通过Vector工具链优化了M核与A核间的通信延迟,满足了自动驾驶的实时性要求。

三、测试验证:从单元测试到系统集成的全覆盖
Vector提供从软件单元测试到整车级系统测试的完整解决方案,确保ECU功能与性能符合设计要求。
1、软件单元测试
使用vTESTstudio编写测试用例,结合vVIRTUALtarget实现虚拟ECU的自动化测试。
功能安全测试集成MICROSAR Safe Test模块,验证安全机制的覆盖率(如看门狗触发条件)。某OEM在M核软件单元测试中,通过Vector工具链覆盖了95%以上的代码分支。
2、ECU集成测试
硬件在环(HIL)测试使用VT System与CANoe搭建HIL测试台架,模拟真实传感器与执行器信号。通信测试通过vTESTstudio验证ECU间的SOME/IP、CAN通信时序与数据一致性。
某域控制器项目通过HIL测试提前发现了跨核通信的丢包问题,避免了后期整改成本。
3、系统级测试
整车网络测试使用CANoe与vTESTstudio进行整车网络负载测试,验证多ECU协同工作的稳定性。OTA升级测试集成vFlash工具,模拟OTA升级流程,验证软件更新过程中的容错能力。某车企通过Vector工具链完成了L3级自动驾驶系统的整车级测试,确保了复杂场景下的功能可靠性。
Vector赋能OEM高效开发
Vector通过标准化工具链、专业化服务与行业经验,为OEM汽车中央控制单元开发提供了从架构设计到测试验证的一站式解决方案。其核心优势包括:
-> AUTOSAR标准深度支持:覆盖Classic与Adaptive平台,降低合规性风险。
-> 功能安全与信息安全集成:提供ASIL D级工具链与加密通信库,满足ISO 26262与ISO/SAE 21434要求。
-> 跨核开发协同:支持M核与A核的混合开发,加速智能驾驶与座舱娱乐功能的融合。
未来,随着汽车电子电气架构向中央计算演进,Vector将持续优化工具链性能,助力OEM应对更高算力、更复杂软件系统的开发挑战。
