【IMMCKF】基于容积卡尔曼滤波(CKF)的多模型交互的定位程序,模型为CV和CT,三维环境,matlab代码|附下载链接
程序的核心是使用容积卡尔曼滤波(CKF)处理非线性观测问题,并集成匀速(CV)和匀角速度转弯(CT)两种运动模型,通过模型交互提高定位精度。同时,程序还包含单模型CKF(纯CV和纯CT)的对比分析,便于评估IMM方法的性能优势。
文章目录
- 程序简介
- 运行结果
- MATLAB源代码
程序简介
以下是对程序关键部分的概述:
-
程序目的与核心算法
- 目标:模拟三维空间中机动目标的轨迹跟踪,例如无人机或飞行器,在存在过程噪声和观测噪声的情况下,估计目标的位置和速度状态。
- 核心滤波方法:容积卡尔曼滤波(CKF)用于处理非线性观测模型(球坐标到笛卡尔坐标的转换)。CKF通过容积点近似非线性函数,避免雅可比矩阵计算,提高数值稳定性。
- 模型交互:采用交互多模型(IMM)框架,动态切换CV和CT模型。IMM包括模型概率计算、混合初始条件和模型特定滤波步骤,以处理目标机动(如直线运动到转弯运动)。
-
运动模型描述
- CV模型(匀速模型)
过程噪声协方差矩阵 QcvQ_{\text{cv}}Qcv 基于噪声强度 qcvq_{\text{cv}}qcv 和采样时间 TTT 构建。 - CT模型(匀角速度转弯模型)
- CV模型(匀速模型)
更多参数信息详见代码注释或专栏文章:
- 【IMM&CKF】基于容积卡尔曼滤波(CKF)的多模型交互的定位程序,模型为CV和CT,三维环境,matlab代码,订阅专栏后可查看完整代码:https://blog.csdn.net/callmeup/article/details/149329717?spm=1011.2415.3001.5331
单独的下载链接:
- IMM&CKF基于容积卡尔曼滤波(CKF)的多模型交互的定位程序,模型为CV和CT,三维环境,matlab代码
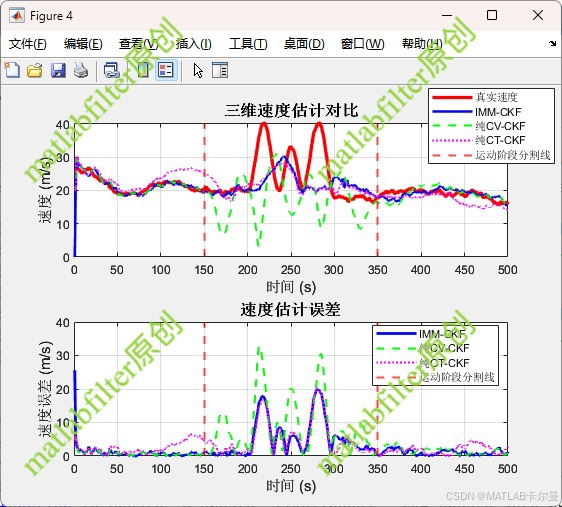
运行结果
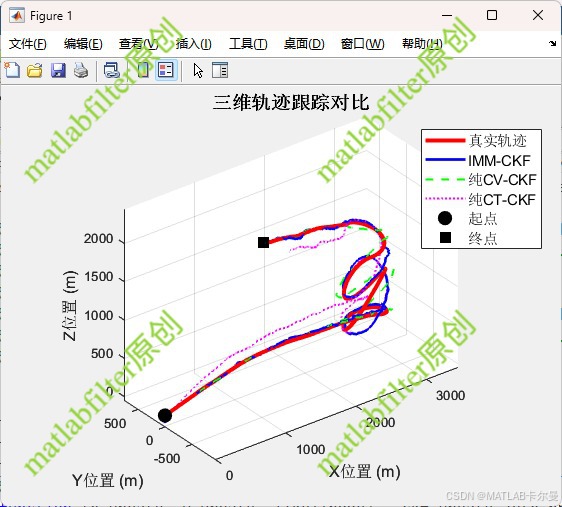
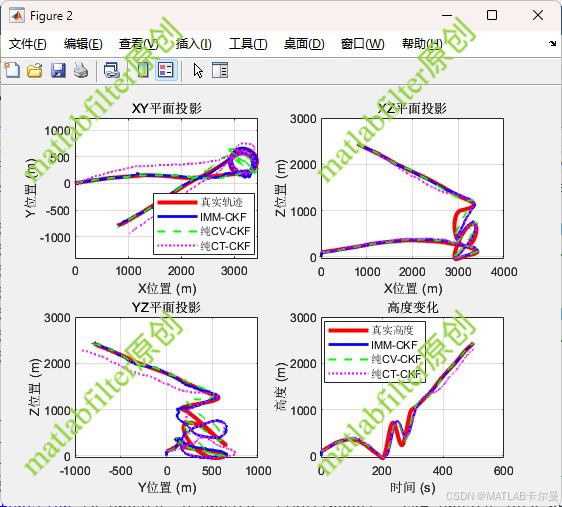
三维轨迹图如下,含各方法估计的轨迹对比:
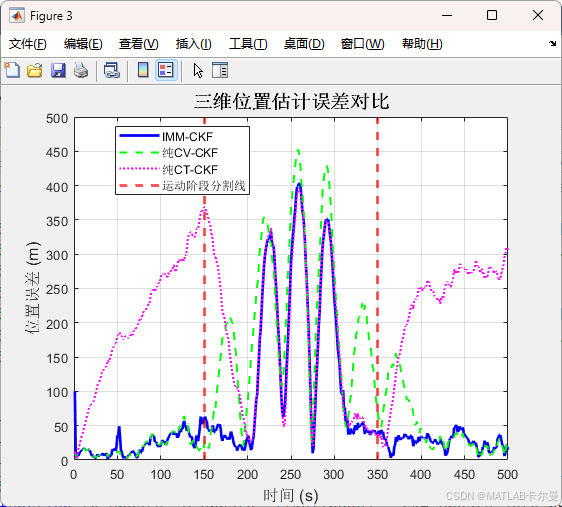
三轴误差曲线,如下:
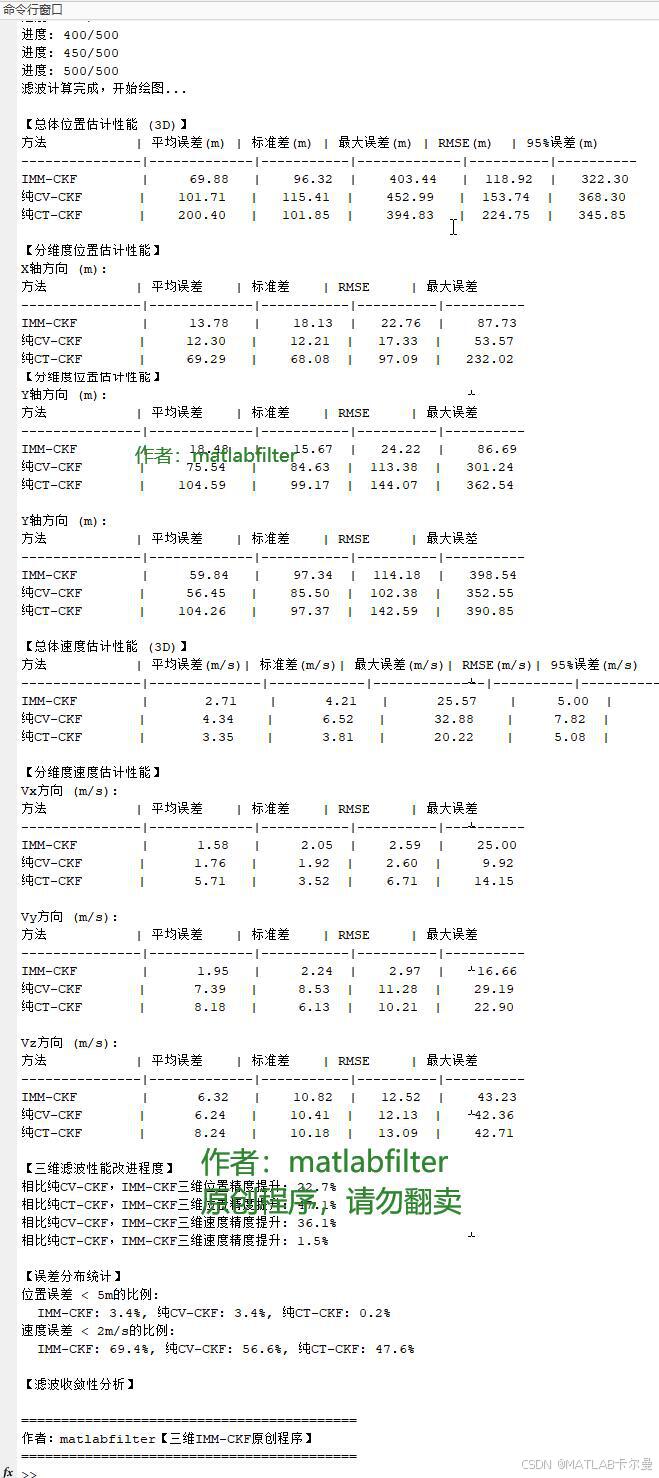
定位结果输出:
MATLAB源代码
程序结构:
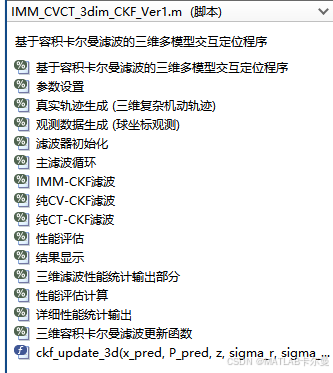
部分代码如下:
%% 基于容积卡尔曼滤波的三维多模型交互定位程序
% 包含CV(匀速)和CT(匀角速度转弯)模型,与单模型CKF对比
% 三维版本:状态[x,y,z,vx,vy,vz],观测[r,θ,φ](球坐标)
% 作者:matlabfilter
% 2025-07-22/Ver1clear; clc; close all;
rng(0);
%% 参数设置
T = 1; % 采样时间
N = 500; % 仿真步数
omega = 0.08; % CT模型角速度 (rad/s)% 测量噪声参数
sigma_r = 3; % 距离测量标准差
sigma_azimuth = 0.03; % 方位角测量标准差 (rad)
sigma_elevation = 0.03; % 俯仰角测量标准差 (rad)% 过程噪声参数
q_cv = 0.1; % CV模型过程噪声强度
q_ct = 0.1; % CT模型过程噪声强度% IMM参数
pi11 = 0.98; pi12 = 0.02; % CV到CV和CV到CT的转移概率
pi21 = 0.03; pi22 = 0.97; % CT到CV和CT到CT的转移概率
Pi = [pi11, pi12; pi21, pi22]; % 模型转移概率矩阵mu = [0.6; 0.4]; % 初始模型概率%% 真实轨迹生成 (三维复杂机动轨迹)
x_true = zeros(6, N); % [x, y, z, vx, vy, vz]
x_true(:,1) = [0; 0; 100; 25; 5; 2]; % 初始状态(包含初始高度)% 生成复合机动轨迹
for k = 2:Nif k < N*0.3% CV模型 - 直线运动F_cv = [1, 0, 0, T, 0, 0;0, 1, 0, 0, T, 0;0, 0, 1, 0, 0, T;0, 0, 0, 1, 0, 0;0, 0, 0, 0, 1, 0;0, 0, 0, 0, 0, 1];x_true(:,k) = F_cv * x_true(:,k-1) + sqrt(q_cv)*[T^2/2*randn; T^2/2*randn; T^2/2*randn; T*randn; T*randn; T*randn];elseif k < N*0.7% CT模型 - 三维转弯运动(主要在水平面转弯,垂直方向有轻微变化)omega_true = omega * (1 + 0.3*sin(k*T)); % 时变角速度sin_wT = sin(omega_true*T);cos_wT = cos(omega_true*T);F_ct = [1, 0, 0, sin_wT/omega_true, -(1-cos_wT)/omega_true, 0;0, 1, 0, (1-cos_wT)/omega_true, sin_wT/omega_true, 0;0, 0, 1, 0, 0, T;0, 0, 0, cos_wT, -sin_wT, 0;0, 0, 0, sin_wT, cos_wT, 0;0, 0, 0, 0, 0, 1];% 添加垂直机动if k > N*0.4 && k < N*0.6x_true(6,k-1) = x_true(6,k-1) + 3*sin(k*T*0.1); % 垂直速度变化endx_true(:,k) = F_ct * x_true(:,k-1) + sqrt(q_ct)*[T^2/2*randn; T^2/2*randn; T^2/2*randn; T*randn; T*randn; T*randn];else% CV模型 - 再次直线运动F_cv = [1, 0, 0, T, 0, 0;0, 1, 0, 0, T, 0;0, 0, 1, 0, 0, T;0, 0, 0, 1, 0, 0;0, 0, 0, 0, 1, 0;0, 0, 0, 0, 0, 1];x_true(:,k) = F_cv * x_true(:,k-1) + sqrt(q_cv)*[T^2/2*randn; T^2/2*randn; T^2/2*randn; T*randn; T*randn; T*randn];end
end%% 观测数据生成 (球坐标观测)
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者