人形机器人——电子皮肤技术路线:光学式电子皮肤及MIT基于光导纤维的分布式触觉传感电子皮肤
mit纤细机械手指触觉传感器可感知埋物
一、光学式电子皮肤的组成结构和工作原理
光学式电子皮肤是一种利用光学传感技术来模拟人体皮肤触觉功能的先进传感器系统,特别适用于机器人、假肢和人机交互领域。通过检测光信号的变化来感知压力、形变、接触位置等物理信息。
(一)核心组成
1. 光学传感单元阵列:
核心元件: 这是电子皮肤感知触觉信息的基础。每个单元相当于一个“触觉像素”。
形式多样: 可以是微型化的摄像头(CMOS/CCD)、光电二极管阵列、光纤布拉格光栅(FBG)阵列、光波导结构上的光栅耦合点、或分布式光纤传感点等。
功能: 负责接收或检测由外部接触引起的光信号变化(强度、波长、相位、模式分布等)。
2. 光源:
类型: 通常使用LED或激光二极管(VCSEL等)。
功能: 提供稳定、可控的光信号输入到传感结构中。光源的波长选择取决于所使用的传感原理和材料特性。
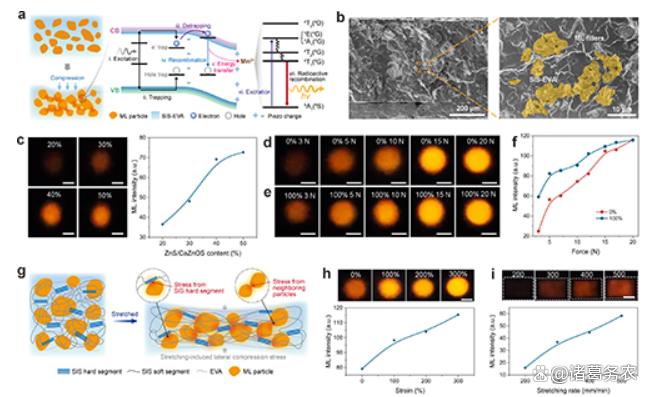
EO-skin的机械发光特性
3. 光波导/导光层:
材料: 透明、柔性的聚合物材料(如PDMS、硅胶、PET、PMMA)或光纤。
功能: 将光源发出的光引导并分布在传感区域内。当外部压力或形变作用于波导层时,会改变其内部的光传输特性(如弯曲损耗、模式耦合、光程)。这是实现触觉传感的关键物理层。
4. 可变形接触/反射层:
位置: 位于光波导层之上或嵌入其中。
材料: 同样需要柔性,如PDMS、硅胶、带有微结构(微柱、微穹顶)的弹性体。
功能:直接接触外界,接收压力、触摸等机械刺激;引起形变,将外力传递到下方的光波导层,使其发生形变;(可选) 反射光, 在某些结构(如光波导上方加反射层)中,该层可以将光反射回波导或下方的传感器。
5. 信号处理与控制系统:
硬件: 包括光电信号转换器(如光电二极管读出电路)、放大器、模数转换器(ADC)、微控制器(MCU)或现场可编程门阵列(FPGA)。
软件: 用于控制光源、采集传感器数据、处理原始光信号(滤波、降噪、解调)、将光信号变化量转换为对应的压力/形变/位置信息、进行空间映射(构建触觉图像)、以及与其他系统通信。
功能: 是整个系统的“大脑”,负责将原始光学信号转化为有意义的触觉信息。
6. 柔性基底:
材料: 聚酰亚胺(PI)、PET、柔性PCB、或与波导层相同的柔性聚合物。
功能: 为所有组件(光源、波导、传感器、电路)提供物理支撑,并赋予整个系统柔性和可贴合性,使其能够覆盖在机器人或假肢的曲面结构上。
7. 封装层:
材料: 柔性、耐磨、化学稳定的弹性体(如PDMS、硅胶)。
功能: 保护内部精密的光学和电子元件免受机械损伤、灰尘、湿气、化学腐蚀等环境影响。
(二)典型结构
光学式电子皮肤的结构设计多种多样,主要取决于采用的传感原理。以下是几种常见结构:
1. 光强度调制型 (最常见):
结构: 柔性接触层(带微结构) | 空气间隙/低折射率层 | 光波导层(含光源) | 光学传感器阵列(位于波导下方或侧面) | 柔性基底
工作原理简化: 外力施加 -> 接触层微结构压向/接触波导层 -> 改变光在波导中的传输路径(增加散射、弯曲、或接触耦合到上方反射层再耦合回来)-> 导致波导输出端(或特定位置传感器)接收到的光强度发生变化 -> 强度变化量对应压力大小。
微结构作用: 增强局部应力集中,提高灵敏度和空间分辨率。
2. 光纤布拉格光栅型:
结构: 柔性接触层 | 封装/粘合层 | 嵌入FBG阵列的光纤 | 柔性基底 (光纤本身也可作为柔性载体)
工作原理简化: FBG是写入光纤纤芯的周期性折射率调制结构,反射特定波长(布拉格波长λB)。外力施加 -> 光纤/FBG发生应变 -> λB发生漂移 -> 检测反射波长的偏移量 -> 换算为应变/压力。阵列中的每个FBG就是一个独立的传感点。
3. 光波导模式耦合型:
结构: 柔性接触层 | 上包层(低折射率) | 光波导芯层(高折射率) | 下包层(低折射率) | 光学传感器阵列(位于波导下方) | 柔性基底
工作原理简化: 外力施加 -> 波导局部形变 -> 改变波导的几何形状或应力状态 -> 影响光在波导中传播的模式(如基模向高阶模耦合)-> 传感器阵列检测光强的空间分布模式变化 -> 反推接触位置、形状和压力分布。这种结构能实现高分辨率成像。
4. 内反射成像型:
结构: 透明柔性弹性体接触层(作为波导和接触面) | 分布式反射粒子/表面微结构 | 光源(从侧面耦合入弹性体) | 摄像头(位于弹性体下方)
工作原理简化: 光源从侧面打入弹性体,光在弹性体内发生全内反射传播。未受压时,摄像头看到均匀暗场。外力施加 -> 接触点处弹性体形变 -> 破坏全内反射条件 -> 光在该点泄漏并被下方摄像头捕获 -> 形成亮斑图像 -> 图像亮斑的位置、大小、亮度对应接触位置、面积和压力。
(三)核心工作原理
光学式电子皮肤的核心原理是将机械刺激(压力、形变)转化为可测量的光信号变化。其工作流程如下:
1. 机械刺激输入:
当电子皮肤表面受到外力(如按压、触摸、滑动)作用时,柔性接触层发生局部形变。
2. 形变传递与光调制:
接触层的形变传递到下方的光波导层(或直接作用于光纤/FBG)。这种形变会以特定方式调制在波导中传播的光信号。调制方式取决于结构设计,主要有:
光强度调制: 形变引起光散射增加、弯曲损耗增大、光耦合效率改变(如与反射层接触或脱离),导致透射或反射光强度降低或升高。
波长调制: 形变引起FBG的周期或有效折射率变化,导致其反射或透射的中心波长发生漂移。
空间模式调制: 形变改变波导的横截面或应力分布,导致光传播模式发生转换或重新分布。
光路成像变化: 形变破坏全内反射,导致局部漏光被成像。
3. 光信号检测:
位于波导末端、侧面或下方的光学传感器阵列(如CMOS相机、光电二极管阵列、光谱仪、光纤解调仪)实时检测光信号的变化。每个传感单元负责捕捉其对应区域的光信号特征(强度值、波长值、光斑图像)。
4. 光电转换与信号处理:
传感器将接收到的光信号转换为电信号。信号处理系统(硬件+软件)对这些原始电信号进行放大、滤波、数字化。
5. 信息提取与映射:
处理系统根据预设的模型和校准数据,将每个传感单元检测到的光信号变化量(Δ强度、Δ波长、模式分布变化、光斑位置亮度)解码为对应的物理量信息(压力大小、应变值)。同时,利用传感单元的空间位置信息,将这些物理量数据映射到电子皮肤的二维或三维表面上,构建出触觉图像或压力分布图。还能通过分析多个连续时间点的数据来识别滑动、振动等动态触觉信息。
6. 输出与应用:
处理后的触觉信息(如压力分布矩阵、接触位置坐标、力矢量、滑动信号)通过通信接口(如I2C, SPI, USB, Ethernet)输出给机器人的控制系统。机器人据此做出反应,例如调整抓握力、识别物体形状和材质、进行精细操作、或实现更安全的人机交互。
(四) 优势与挑战
1. 优势:
高灵敏度和分辨率: 光学检测本身精度高,可实现微米级形变感知和高空间分辨率成像。
抗电磁干扰: 光信号不受外部电磁场干扰,适合复杂电磁环境。
本质安全: 传感部分无电信号通过接触面(光源和传感器可物理隔离),适用于易燃易爆或生物兼容场景。
高速响应: 光信号传播速度快,可实现动态触觉感知(如振动、滑动)。
易于实现分布式和阵列化感知: 光纤、光波导和成像技术天然适合构建大面积、高密度传感器阵列。
可复用波长维度: FBG等技术可利用不同波长区分多个传感点。
2. 挑战:
结构相对复杂: 需要光源、波导、光路、传感器精密集成。
信号处理复杂度高: 尤其是成像型和模式耦合型,需要强大的实时图像处理和模式识别算法。
环境光干扰: 需良好屏蔽或采用调制光源技术抑制环境光噪声。
柔性封装挑战: 在保持高柔韧性和耐用性的同时,保护内部精密光学元件和光路。
成本: 高性能光源、传感器和复杂制造工艺可能带来较高成本。
校准: 需要精确的标定来建立光信号变化与物理量之间的映射关系。
(五)应用与总结:
1. 应用
机器人灵巧手抓取与操作(力控制、滑移检测、物体识别);仿生假肢(恢复触觉反馈)
人机协作安全(碰撞检测、轻柔接触);医疗机器人(手术器械力反馈、康复训练);可穿戴健康监测(脉搏、呼吸、肌肉活动);虚拟现实/增强现实触觉交互
2. 总结:
光学式电子皮肤通过精心设计的柔性光学结构(波导、光纤、微结构)将外部机械刺激转化为光信号的变化(强度、波长、模式、图像),并利用高密度光学传感器阵列和强大的信号处理系统,将这些光信号变化解码、映射为高分辨率的触觉信息(压力、形变、位置、动态)。尽管在结构和信号处理上存在挑战,其高灵敏度、抗干扰、本质安全和易于阵列化的优势使其在机器人触觉感知领域具有重要价值和广阔前景。
二、光学式电子皮肤性能特征及在机器人上应用的比较优势和不足
光学式电子皮肤凭借光学信号的高灵敏度、抗电磁干扰和多模态感知能力,已成为人形机器人触觉感知的核心技术。
(一)性能特征与技术参数
1. 超高灵敏度与分辨率
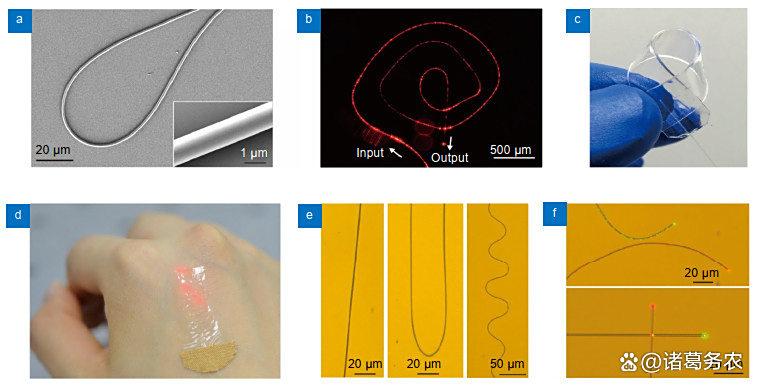
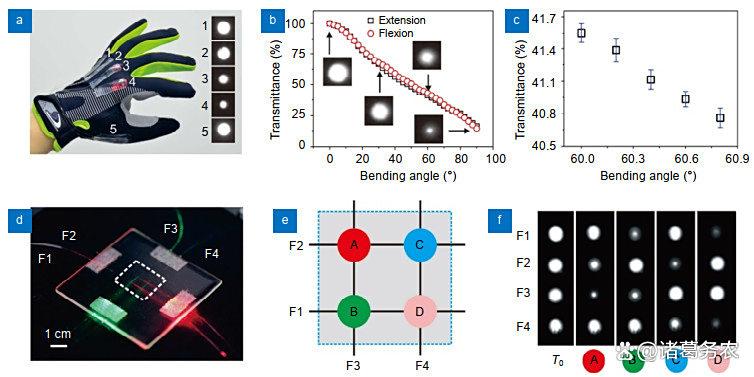
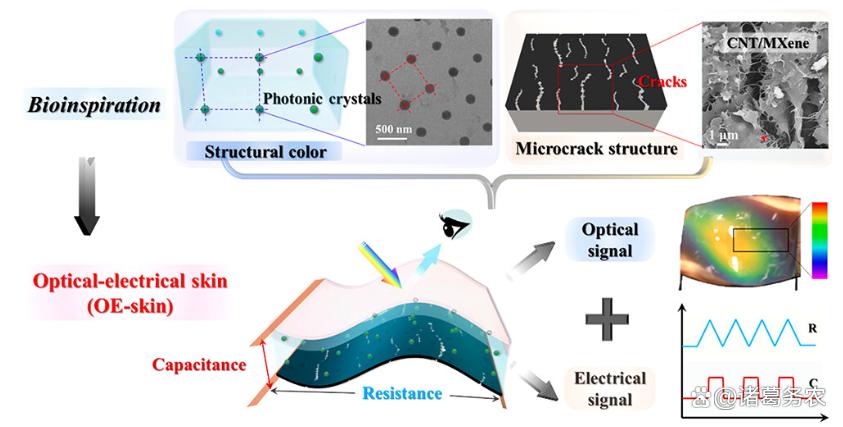
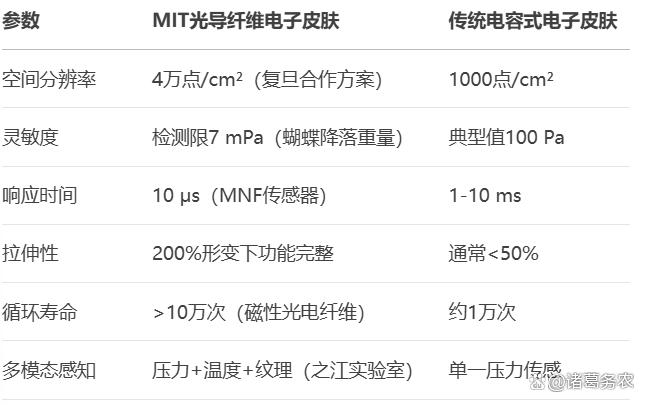
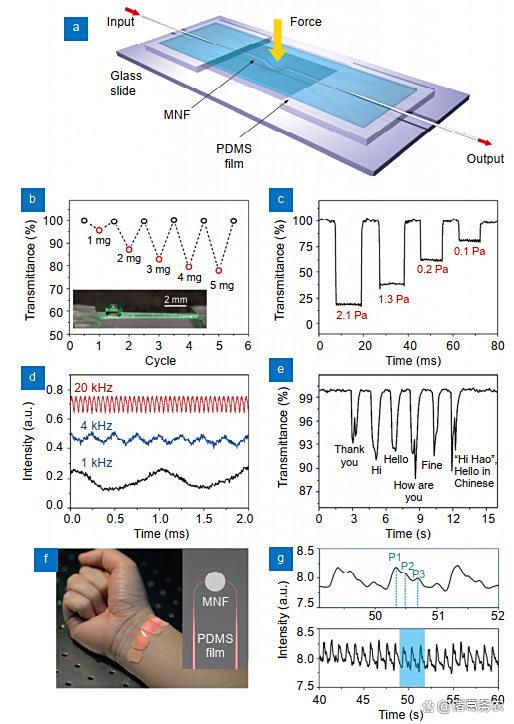
灵敏度:之江实验室的玻璃微/纳米纤维(MNF)传感器灵敏度达1870 kPa⁻¹,检测限低至7 mPa(接近蝴蝶降落重量);香港理工大学的光/电双信号皮肤(OE-Skin)压力检测限65 Pa,应变灵敏度系数(GF)高达191.8。
空间分辨率:复旦大学视触觉传感器达4万感知点/平方厘米,超人体指尖10倍。
2. 快速响应与动态感知
MNF传感器响应时间10 μs,远超人类触觉受体(1–50 ms);OE-Skin响应速度126 ms,支持实时抓取控制。格拉斯哥大学光敏电子皮肤光响应仅2.5 ms,恢复时间8 ms,适用于高速操作场景。
3. 多模态感知能力
力/热双模:之江实验室光学纳米纤维皮肤可同步检测压力、温度及表面纹理(如叶脉)多维力解耦:复旦大学传感器通过AI算法将触觉信号转化为视觉数据,实现正压力、切向力、扭转力的精确分离
4. 柔性与耐用性
厚度约500 μm(类人皮肤),可弯曲500次无性能损失OE-Skin稳定运行5000次循环测试
(二)在人形机器人中应用典型优势
1. 高抗干扰与环境适应性
光信号不受电磁干扰,适用于工业强电磁环境光敏皮肤(如砷化镓柔性探测器)支持紫外-红外波段感知,扩展机器人环境感知维度
2. 仿生交互与安全性
类皮肤柔性界面避免损伤物体,适合人机协作场景
交互反馈响应柔性光学电学皮肤(OE-Skin
(三)技术不足与挑战
1. 信号处理复杂度高
成像型传感器需实时处理高维视觉数据(如复旦方案依赖内置摄像头和AI算法),算力需求大
2. 环境光干扰与封装工艺
需屏蔽环境光噪声(如采用调制光源),且柔性封装需平衡光学元件保护与形变自由度
3. 系统集成与成本
光源、波导、传感器精密集成难度高,MNF和光子晶体结构制造成本昂贵
4. 力热耦合干扰
温度变化可能影响光学力传感器精度,需开发解耦算法
(四)前沿进展(2023–2025)

光学电子皮肤前沿进展
(五)未来趋势
1. 多模态感知扩展
结合嗅觉(电子鼻)、温度、湿度传感,构建类人皮肤全感知系统(如迅捷兴项目)。
2. 智能闭环控制
整合强化学习,提升机器人动态操作灵巧性;开展触觉大模型训练,优化复杂场景适应性。
3. 材料与工艺革新
开发可印刷柔性光电器件(如砷化镓滚印技术),降低成本并支持定制化。
4. 神经形态光电子
模拟生物神经信号处理机制,实现光-电融合的低功耗触觉感知网络。
(六)总结:应用前景与突破点
光学式电子皮肤凭借超高灵敏度、抗干扰性和多维感知能力,已成为人形机器人精细化操作的基石。未来需突破信号处理效率、环境鲁棒性及成本控制等瓶颈,并依托多模态融合与仿生设计,向“感知-决策-执行”一体化智能系统演进。工业精密装配、医疗微创手术、家庭服务机器人将是其核心落地场景。
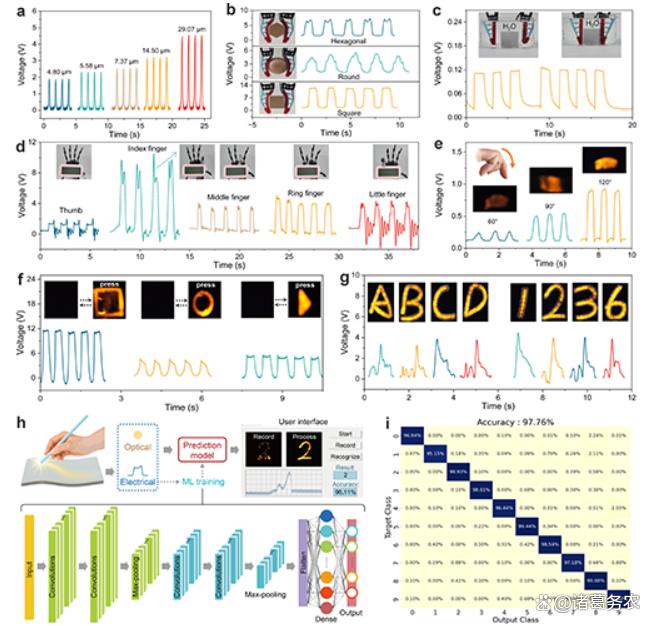
EO-skin的光电双模传感应用
三、光学式电子皮肤材料技术进展和限制及理想材料
(一)光学式电子皮肤对材料技术的具体要求
1. 光学性能
高透明度与低光损耗:波导层需具备>90%的透光率(如PDMS、水凝胶),以减少信号衰减。
可控折射率:波导与包层材料的折射率差需精确调控(如PU反蛋白石薄膜),以实现高效光约束或泄漏调制。
2. 机械性能
柔性可拉伸:弹性基底(如SIS-EVA、水凝胶)需支持>50%应变,以适应动态形变。
耐久性:抗疲劳特性需满足>5000次循环测试(如OE-Skin的微裂纹导电层)。
3. 环境稳定性
温湿度不敏感:材料在-35°C~100°C及潮湿环境下需保持性能稳定(如离子凝胶锁定的非挥发性离子液体)。
抗电磁干扰:光学材料需避免电信号干扰,适用于工业场景。
4. 功能集成性
多信号协同:材料需同时支持光学变色与电学传感(如ZnS/CaZnOS:Mn²⁺机械发光层与碳纳米管电极的集成)。
界面兼容性:多层结构(波导/电极/封装)需无缝耦合,避免分层(如SIS-EVA基质的三明治结构)。
5. 加工可行性
低温工艺兼容性:制造温度需≤90°C,以适配柔性基底(如非晶硅光电器件的低温PECVD技术)。
(二) 限制性能发挥的材料技术不足
1. 光学-力学性能矛盾
透明性与强度的权衡:高透明聚合物(如PDMS)机械强度低,易撕裂;而高强度材料(如芳纶纤维)透光性差。
拉伸下的光学稳定性:多数光子晶体在>30%应变时结构色失效(如PU反蛋白石薄膜的色移不可逆)。
2. 界面与集成缺陷
层间脱粘问题:异质材料(如金属电极与聚合物波导)热膨胀系数不匹配,导致弯折时分层。
信号串扰:多层集成时光/电信号相互干扰(如电容式压力传感与光波导的耦合噪声)。
3. 环境敏感性缺陷
湿度引发的性能漂移:水凝胶在潮湿环境中溶胀,导致折射率变化和信号失真。
温度-力耦合干扰:碳纳米管复合材料中,温度变化易被误识别为压力信号(需开发解耦算法)。
4. 制造成本与复杂性
光子结构的高成本:光子晶体(如SiO₂纳米球模板)需精密自组装,量产难度大。
柔性光电器件良率低:低温工艺下非晶硅缺陷控制难(如传统工艺缺陷率达15%,KIMS技术降至<5%)。
5. 能源供给限制
依赖外部电源:多数光学传感器需外接光源(如LED),增加系统体积(仅摩擦电/压电材料可部分自供电)。
多层织物 “表皮和真皮”
(三) 理想材料的核心性能特征
基于上述挑战,理想材料应具备以下多维度协同特性:
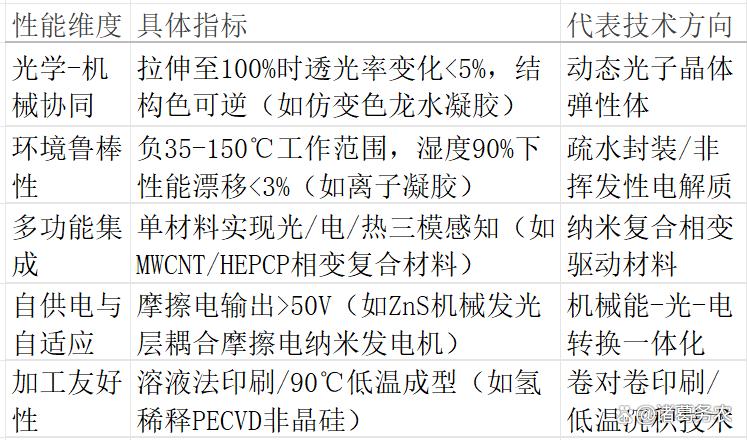
光学电子皮肤理想材料核心性能要求
(四)关键创新方向:
1. 仿生结构设计
微裂纹导电层:模仿蜘蛛裂隙器官,实现应变下电阻线性变化(GF>190)。
动态结构色界面:仿变色龙皮肤,通过光子晶体晶格间距调控实现可视化压力映射。
2. 智能响应材料
相变驱动聚合物:HEPCP中微晶体相变驱动碳纳米管网络重构,实现光/热/力三模响应。
自愈合弹性体:SIS-EVA基质实现93%自愈率,修复后光电性能恢复>90%。
3. 异质界面优化
软界面耦合:石墨烯电极与ZnO纳米棒形成“软接触”肖特基结,弯折时能带稳定性提升。
(五)总结:材料技术突破路径
光学式电子皮肤的性能上限由材料体系决定,未来突破需聚焦:
多尺度结构设计:从分子链(如交联度调控)到宏观结构(如微柱阵列)协同优化光学与机械性能。
动态解耦机制:开发力-热-光信号分离算法(如机器学习辅助)与温度不敏感光子晶体。
绿色制造工艺:推广溶液法加工(如银纳米线涂布)与低温沉积技术,降低成本至现有1/3。
理想的光学式电子皮肤材料应是“会思考的仿生皮肤”:在分子层面整合光-机-电功能,在宏观层面实现自感知、自修复、自供能,最终推动人形机器人触觉感知逼近甚至超越人类皮肤极限。
四、MIT基于光导纤维的分布式触觉传感电子皮肤
(一)技术原理与核心架构
1. 光信号调制机制
形变-光转换:外部压力或形变作用于柔性光波导层(如PDMS/硅胶),改变光传输路径,引发光强衰减、波长偏移或模式耦合效应。例如:弯曲损耗,波导弯曲导致全反射条件破坏,光强衰减量与曲率成正比;FBG(光纤布拉格光栅),应变引起光栅周期变化,反射波长漂移(灵敏度达1.2 pm/με);内反射成像,受压区域破坏全内反射,局部漏光被CMOS摄像头捕获,形成压力分布图像。
分布式感知:单根光纤集成多个传感点(如FBG阵列),通过光时域反射(OTDR) 或 波分复用(WDM) 技术实现空间分辨,减少布线复杂度。
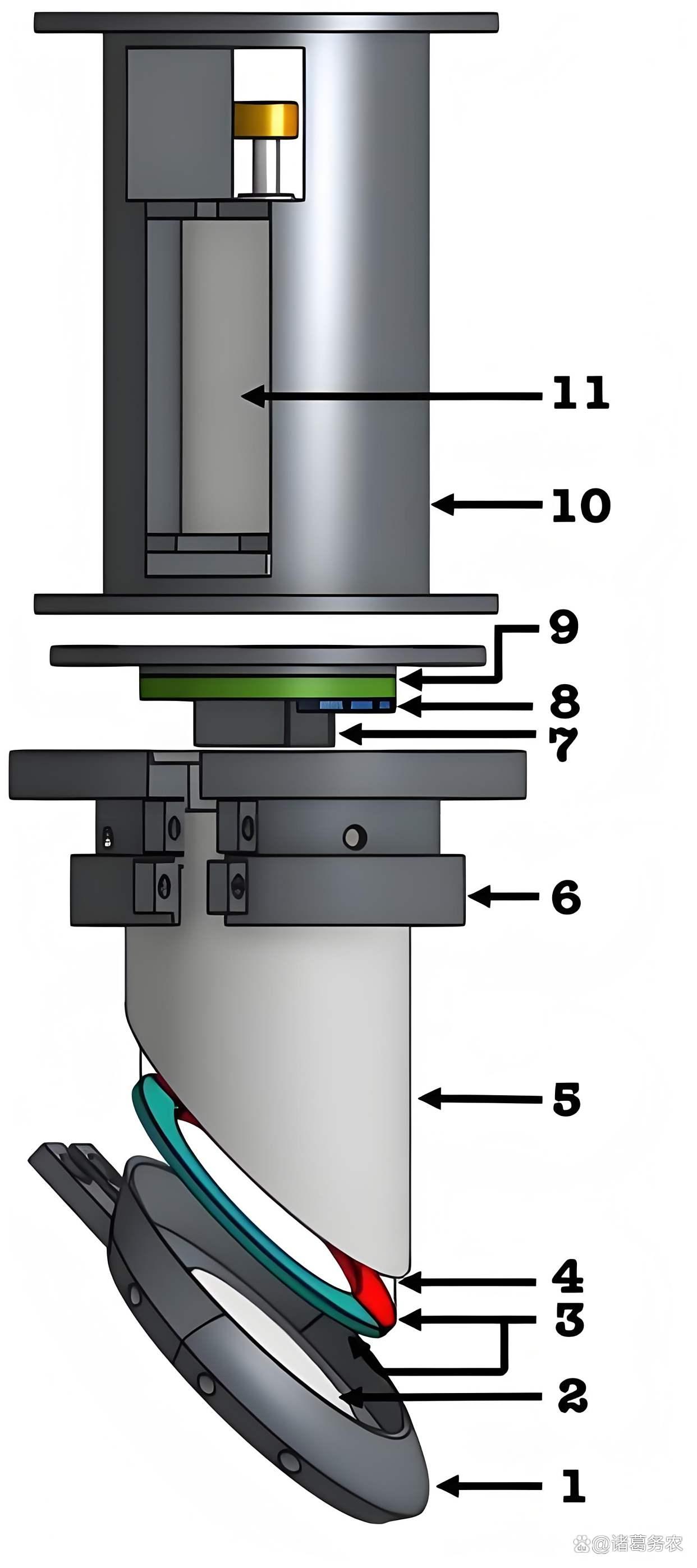
2. 系统架构创新
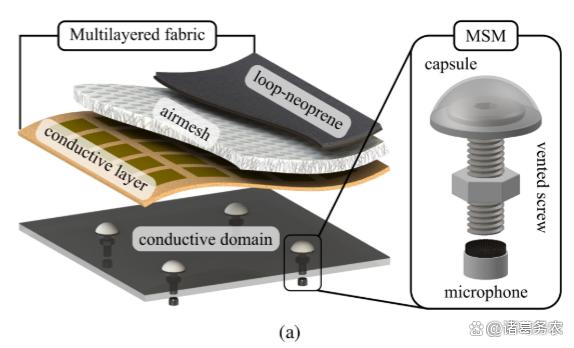
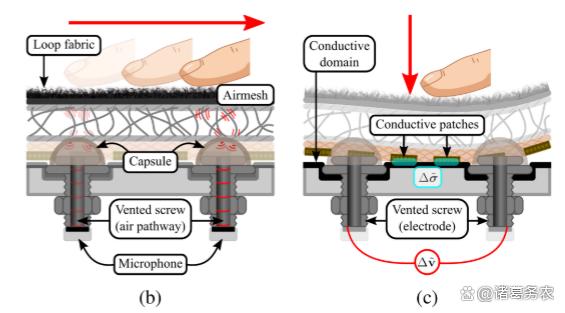
三层同轴纤维设计(MIT 2024):芯层,轴取向铁磁纤维(NdFeB/PDMS),磁场沿轴向分布(磁化强度90 kA·m⁻¹);中层,螺旋缠绕漆包铜线线圈,响应磁通变化产生感应电流(法拉第电磁感应);皮层,ZnS:Cu力致发光层,受压时发射可见光(波长520 nm),实现光-电双信号输出。
多模态融合:结合声学超分辨率(ASR)与电阻抗断层扫描(ERT):ASR,麦克风捕捉高频振动(>20 Hz),通过声波衰减定位触摸位置(精度达6 cm内);ERT,电极监测低频压力(0-200 Hz),重构压力分布图(灵敏度0.24 N)。
(二)材料与制造工艺
1. 关键材料特性

MIT分布式触觉传感关键材料特性
2. 核心制造工艺
热拉伸预成型:将硅基芯片、光波导、电极集成于预制棒,高温拉伸成纤维(直径<1 mm),实现微米级器件三维嵌入。
磁取向纺丝:铁磁浆料在2-5 T脉冲磁场中挤出,颗粒轴向定向固化,确保磁场方向一致性。
卷对卷印刷:连续化包裹发光层与线圈,缠绕密度10-50圈/cm,支持千米级生产。
多模态传感模块MSMs皮肤
(三) 多模态感知机制
1. 动态触觉分类
通过卷积神经网络(CNN)解码ASR与ERT信号,实现对9种触摸模态的识别:对高频动作如,拍打(Hit)、摩擦(Rub)、轻触(Tap)→ ASR主导;对静态压力,按压(Press)、抓握(Grab)→ ERT主导。分类准确率达95.3%,响应时间<80 ms。
2. 环境交互增强
水下感知:光信号不受液体干扰,磁性光电纤维在水下拉伸时仍输出稳定光/电信号。
抗电磁干扰:光纤传感在强电磁场(如工业机器人环境)中保持稳定性,误码率低于10⁻⁶。
(四) 性能特征与技术参数
MIT分布式触觉传感性能特征与技术参数
(五) 应用场景与系统集成
1. 人形机器人
全身触觉覆盖:稀疏分布传感器(间距75 mm)通过算法重构全身压力分布,降低硬件成本。
安全交互:UR5e机械臂集成电子皮肤后,可实时检测碰撞并触发急停(延迟<5 ms)。
2. 可穿戴医疗
生命体征监测:防寒服内嵌光纤网络,通过PPG传感器捕捉末梢血管收缩,预警动脉硬化。
精神健康评估:肩颈肌电信号分析抑郁症焦虑水平,准确率89%。
3. 极端环境应用
宇航服:辐射传感光纤实时映射宇宙射线,自修复电路抵御太空微粒撞击。
极地科考:-40℃环境下光纤组网,共享队员生命体征并触发群体热协调模式。
(六) 技术挑战与前沿突破
1. 现存瓶颈
信号解耦难题:温度漂移影响光学压力传感精度(如碳纳米管复合材料需AI解耦算法)。
环境光干扰:需屏蔽设计或调制光源(如MicroLED脉冲驱动)。
集成复杂度:光源、波导、传感器精密对准难度高,量产良率仅65%。
2. MIT创新方案
神经形态光电子:模拟生物神经信号处理,开发光-电融合的低功耗感知网络(能耗降低90%)。
AI驱动超分辨率:通过CNN提升稀疏传感器空间定位精度(误差<1 mm)。
(七) 未来趋势
1. 仿生智能化
开发动态结构色界面(仿变色龙皮肤),实现压力可视化映射;自愈合材料(SIS-EVA)修复后性能恢复>90%。
2. 能源自治
摩擦电-光耦合(ZnS层+TENG),机械能直接转换为光/电信号,摆脱外部电源。
3. 脑机接口融合
与外周神经接口结合,让截肢患者通过衣物感知假肢触觉(已引发寒冷战栗脑电反应)。
(八)总结
MIT的光纤电子皮肤技术通过光-机-电多物理场耦合与分布式智能算法,突破了传统传感的刚性限制,在灵敏度(mPa级)、环境适应性(-40°C~150°C)及多模态感知方面逼近生物皮肤极限。未来随着神经形态计算与可编程材料的发展,该技术将向“感知-决策-执行”一体化的类生命系统演进,成为人形机器人、太空探索及数字医疗的核心感知层。
【免责声明】本文主要内容均源自公开信息和资料,部分内容引用Ai,仅作参考,不作任何依据,责任自负。