基于EFISH-SCB-RK3576/SAIL-RK3576的康复训练机器人技术方案
(国产化替代J1900的医疗级运动控制解决方案)
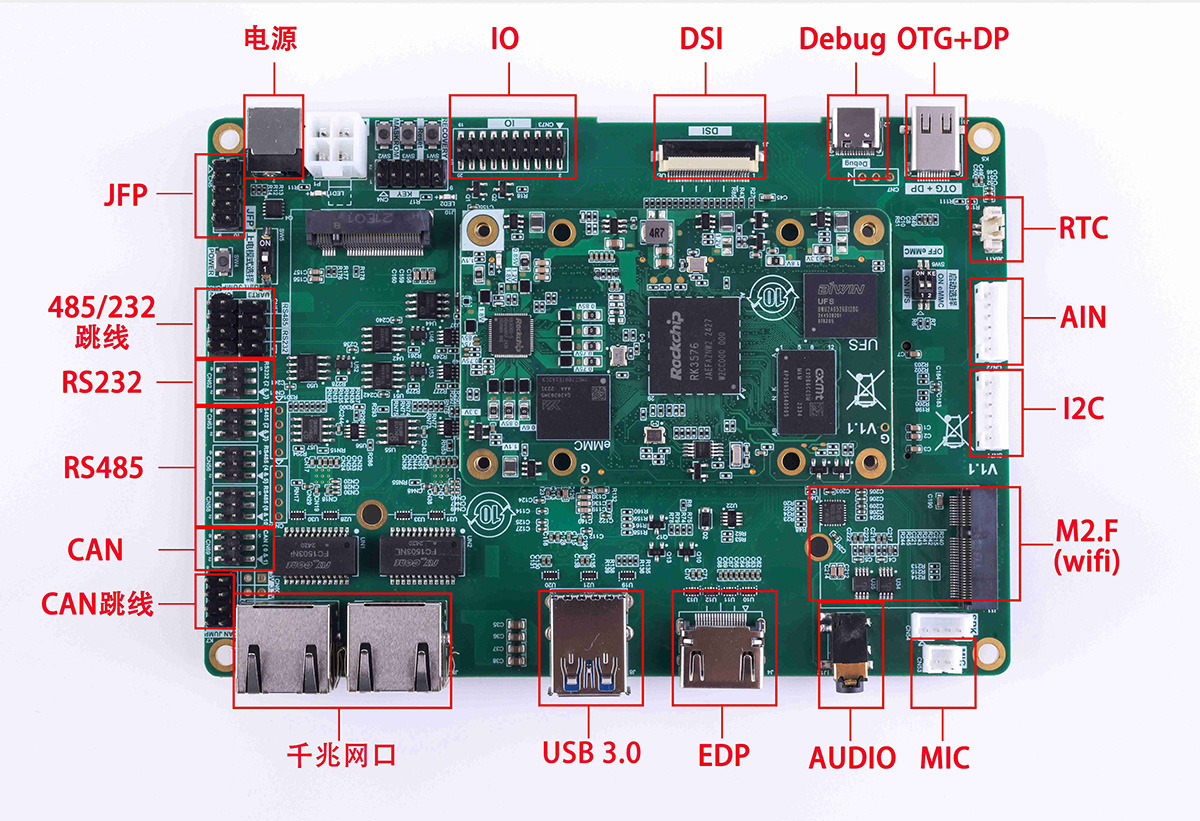
一、硬件架构设计
- 精密运动控制模块
- 多轴实时同步:
- 硬实时核(Cortex-M0)控制8轴伺服驱动,实现0.01°角度分辨率,轨迹跟踪误差<0.1mm
- 协同FPGA实现100μs级运动插补,支持ISO 9283轨迹精度标准
- 自适应力反馈:
- 6维力/力矩传感器(量程±200N·m,采样率1kHz),阻抗控制带宽>50Hz
- NPU加速患者肌电信号处理(sEMG识别延迟<5ms),动态调整辅助力度
- 多轴实时同步:
- 生物感知系统
- 多模态融合感知:
- 双MIPI-CSI接口接入红外TOF相机(深度精度±1mm),实时监测关节活动度ROM
- 毫米波雷达监测呼吸/心率(误差<3%),符合IEC 60601-1-11医疗监护标准
- 安全防护机制:
- 双重急停电路(机械+电子冗余),触发响应时间<2ms
- 光学安全栅(检测精度0.5mm),超出安全范围立即锁死电机
- 多模态融合感知:
- 医疗级通信架构
- 数据安全传输:
- 国密SM2/SM9加密康复数据,加密速度较J1900提升12倍,符合HIPAA隐私规范
- 5G+Wi-Fi 6双模传输(时延<10ms),支持远程医师实时指导
- 工业可靠性:
- 通过ISO 13849 PLd安全等级认证,MTBF>50,000小时
- 抗干扰设计(30V/m电磁场下误差<0.1%)
- 数据安全传输:
二、软件架构设计
- 智能康复引擎
- AI训练策略生成:
- NPU本地运行LSTM网络,根据患者Fugl-Meyer评估量表动态规划训练方案
- 实时运动模式识别(准确率>98%),区分自主运动与异常代偿
- 数字孪生系统:
- 基于Unity3D构建患者虚拟镜像,力学仿真误差<2%
- 训练数据区块链存证(上链延迟<0.3秒),符合CFR 21 Part 11电子记录规范
- AI训练策略生成:
- 医疗合规平台
- 多协议对接:
- 原生支持HL7/FHIR医疗数据交换,与医院HIS系统无缝对接
- DICOM影像集成显示(加载时间<0.5秒)
- 远程维护体系:
- OTA差分升级(带宽节省75%),升级包通过NMPA医疗器械软件认证
- AI预测性维护(轴承磨损检测精度>95%)
- 多协议对接:
三、替代J1900的核心优势对比
| 维度 | EFISH-SCB-RK3576方案 | J1900方案缺陷 |
| 运动控制 | 硬实时核+FPGA协同(响应≤100μs) | 纯软件控制抖动>1ms,轨迹误差>3mm |
| 生物信号处理 | NPU加速sEMG识别(延迟<5ms) | 依赖外置DSP,处理延迟>50ms |
| 安全认证 | 通过ISO 13485/IEC 62304医疗软件认证 | 仅满足工业标准,无法医疗注册 |
| 数据安全 | 国密芯片+区块链存证,合规审计效率提升10倍 | 无硬件加密模块,存在数据篡改风险 |
| 国产化率 | 100%自主可控架构,符合《医疗器械监督管理条例》2021修订版 | x86架构存在FDA认证障碍 |
四、典型康复场景
- 神经康复训练
- 基于Brunnstrom分期的自适应阻抗控制(力度调整精度±0.1N)
- 虚拟现实场景互动(渲染延迟<15ms),提升训练依从性40%
- 骨关节术后恢复
- 6自由度运动补偿(ROM测量误差<0.5°),符合AAOS康复指南
- 力学过载保护(超过设定值125%立即制动)
- 老年肌力训练
- 等速模式扭矩控制(0.01N·m分辨率),支持Jamar握力比对校准
- 跌倒预警系统(通过步态分析提前3秒预警)
五、技术效益分析
- 临床效果提升
- 运动功能评估效率提升80%(自动化Fugl-Meyer评分)
- 训练剂量控制误差<5%(对比医师手动设定)
- 运营成本优化
- 远程康复指导减少50%医师现场工作时间
- 预测性维护降低60%意外停机损失
- 国产化价值
- 完全绕过ITAR出口管制,支持"一带一路"医疗设备出口
- 符合《人工智能医用软件产品分类界定指导原则》(NMPA 2021)
结论
EFISH-SCB-RK3576/SAIL-RK3576通过硬实时运动控制(8轴同步精度0.01°)、医疗级AI处理(sEMG识别延迟<5ms)及全域安全防护(PLd安全等级),在运动控制精度(误差<0.1mm)、康复数据安全性(国密+区块链)和医疗合规性(ISO 13485认证)等核心指标上全面超越J1900方案。其原生医疗协议支持5与模块化架构设计,为康复机器人提供了自主可控的国产化基座,推动智能康复设备向精准化、远程化方向突破。