基于STM32单片机RLC检测仪
基于STM32单片机RLC检测仪
(程序+原理图+PCB+设计报告)
功能介绍
具体功能:
根据使STM32单片机的外部按钮控制测量电路的选择,测量电阻Rx和电容Cx时,选用RC振荡电路,通过NE555定时器产生对应的频率;当测量电感Lx时,待测电感Lx通过NE555定时器连接到电容的三点振荡电路,导出频率FL,然后STM32对这些频率进行计数和定时,然后再进行内部计算分析,使电阻电容电感的测量转化为频率的测量,然后由微控制器STM32处理测量结果并将其发送到 LCD1602液晶显示器以进行显示。
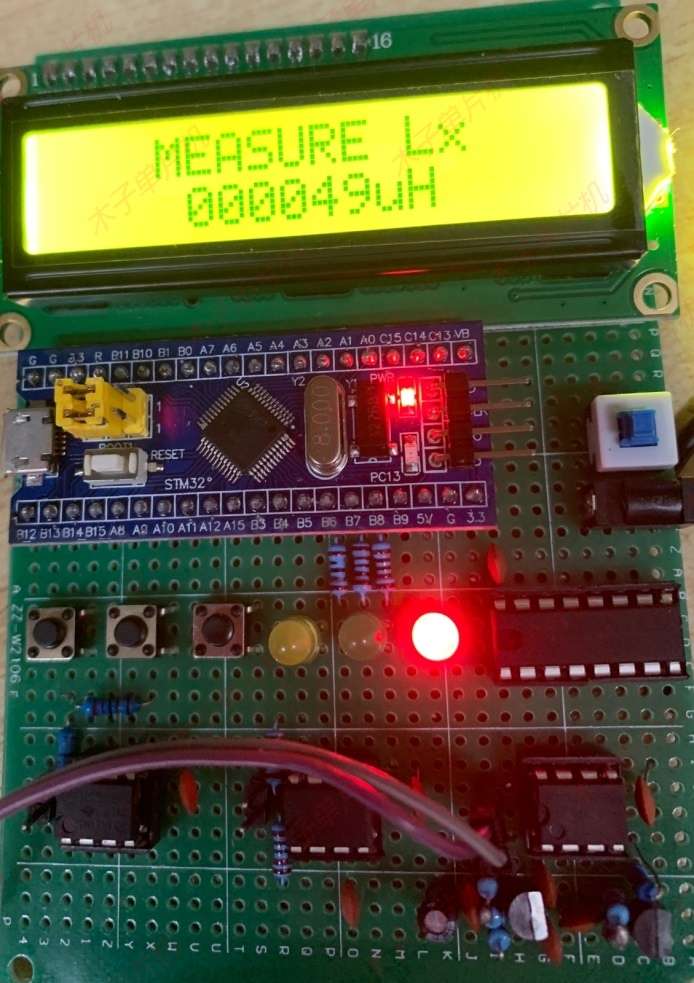
添加图片注释,不超过 140 字(可选)
程序
#include "led.h"
#include "delay.h"
#include "sys.h"
#include "timer.h"
#include "usart1.h"
#include "LCD1602.h"
#include "key.h"
#include "exti.h"
#include "string.h"
#include "stdio.h"u8 mode = 2;void keyscan()
{u8 key;key = KEY_Scan(0);if(key == 1){mode = 1;LED1 = 0;LED2 = 1;LED3 = 1;CD4052_B = 0;//电容档CD4052_A = 0;LCD_Write_String(0,0," MEASURE Cx ");LCD_Write_String(0,1," 00000.0pF ");}if(key == 2){mode = 2;LED1 = 1;LED2 = 0;LED3 = 1;CD4052_B = 0;//电阻档CD4052_A = 1;LCD_Write_String(0,0," MEASURE Rx ");LCD_Write_String(0,1," 0000.000K ");}if(key == 3){mode = 3;LED1 = 1;LED2 = 1;LED3 = 0;CD4052_B = 1;//电感档CD4052_A = 0;LCD_Write_String(0,0," MEASURE Lx ");LCD_Write_String(0,1," 000000uH ");}
}extern unsigned long RX2;
extern float CZ;
extern float LZ;int main(void)
{ unsigned int count;delay_init(); //延时函数初始化 NVIC_Configuration(); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级 delay_ms(300);KEY_Init();LED_Init();CD4052_Init();LCD_Init(); // 1602初始化 EXTIX_Init();CD4052_B = 0;//电阻档CD4052_A = 1;LED1 = 1;LED2 = 0;LED3 = 1;LCD_Write_String(0,0," MEASURE Rx ");LCD_Write_String(0,1," 0000.000K ");TIM2_Int_Init(999,7199); //定时器初始化,定时100MSwhile(1){keyscan();if(count++ > 100){if(mode == 1)//显示电容值{LCD_Write_Char(4,1,(long)CZ/100000+'0');LCD_Write_Char(5,1,(long)CZ%100000/10000+'0');LCD_Write_Char(6,1,(long)CZ%10000/1000+'0');LCD_Write_Char(7,1,(long)CZ%1000/100+'0');LCD_Write_Char(8,1,(long)CZ%100/10+'0');LCD_Write_Char(10,1,(long)CZ%10+'0');}if(mode == 2)//显示电阻值{LCD_Write_Char(3,1,RX2/1000000+'0');LCD_Write_Char(4,1,RX2%1000000/100000+'0');LCD_Write_Char(5,1,RX2%100000/10000+'0');LCD_Write_Char(6,1,RX2%10000/1000+'0');LCD_Write_Char(8,1,RX2%1000/100+'0');LCD_Write_Char(9,1,RX2%100/10+'0');LCD_Write_Char(10,1,RX2%10+'0');}if(mode == 3)//显示电感值{LCD_Write_Char(4,1,(long)LZ/100000+'0');LCD_Write_Char(5,1,(long)LZ%100000/10000+'0');LCD_Write_Char(6,1,(long)LZ%10000/1000+'0');LCD_Write_Char(7,1,(long)LZ%1000/100+'0');LCD_Write_Char(8,1,(long)LZ%100/10+'0');LCD_Write_Char(9,1,(long)LZ%10+'0');}}delay_ms(1);}
}
*******//完整资料
*******//微信公众号:木子单片机
#include "key.h"
#include "sys.h"
#include "delay.h"//按键初始化函数
void KEY_Init(void) //IO初始化
{ GPIO_InitTypeDef GPIO_InitStructure;//初始化KEY0-->GPIOA.13,KEY1-->GPIOA.15 上拉输入RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//使能PORTA,PORTE时钟GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12|GPIO_Pin_13|GPIO_Pin_14;//PE2~4GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //设置成上拉输入GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIOE2,3,4
}
//按键处理函数
//返回按键值
//mode:0,不支持连续按;1,支持连续按;
//0,没有任何按键按下
//1,KEY0按下
//2,KEY1按下
//3,KEY2按下
//4,KEY3按下 WK_UP
//注意此函数有响应优先级,KEY0>KEY1>KEY2>KEY3!!
u8 KEY_Scan(u8 mode)
{ static u8 key_up=1;//按键按松开标志if(mode)key_up=1; //支持连按 if(key_up&&(KEY0==0||KEY1==0||KEY2==0)){delay_ms(10);//去抖动 key_up=0;if(KEY0==0)return 1;else if(KEY1==0)return 2;else if(KEY2==0)return 3;}else if(KEY0==1&&KEY1==1&&KEY2==1)key_up=1; return 0;// 无按键按下
}
#include "delay.h"
#include "sys.h"
//
//如果使用ucos,则包括下面的头文件即可.
#if SYSTEM_SUPPORT_UCOS
#include "includes.h" //ucos 使用
#endif//V1.2修改说明
//修正了中断中调用出现死循环的错误
//防止延时不准确,采用do while结构!//V1.3修改说明
//增加了对UCOSII延时的支持.
//如果使用ucosII,delay_init会自动设置SYSTICK的值,使之与ucos的TICKS_PER_SEC对应.
//delay_ms和delay_us也进行了针对ucos的改造.
//delay_us可以在ucos下使用,而且准确度很高,更重要的是没有占用额外的定时器.
//delay_ms在ucos下,可以当成OSTimeDly来用,在未启动ucos时,它采用delay_us实现,从而准确延时
//可以用来初始化外设,在启动了ucos之后delay_ms根据延时的长短,选择OSTimeDly实现或者delay_us实现.//V1.4修改说明 20110929
//修改了使用ucos,但是ucos未启动的时候,delay_ms中中断无法响应的bug.
//V1.5修改说明 20120902
//在delay_us加入ucos上锁,防止由于ucos打断delay_us的执行,可能导致的延时不准。static u8 fac_us=0;//us延时倍乘数
static u16 fac_ms=0;//ms延时倍乘数
#ifdef OS_CRITICAL_METHOD //如果OS_CRITICAL_METHOD定义了,说明使用ucosII了.
//systick中断服务函数,使用ucos时用到
void SysTick_Handler(void)
{ OSIntEnter(); //进入中断OSTimeTick(); //调用ucos的时钟服务程序 OSIntExit(); //触发任务切换软中断
}
#endif//初始化延迟函数
//当使用ucos的时候,此函数会初始化ucos的时钟节拍
//SYSTICK的时钟固定为HCLK时钟的1/8
//SYSCLK:系统时钟
void delay_init()
{#ifdef OS_CRITICAL_METHOD //如果OS_CRITICAL_METHOD定义了,说明使用ucosII了.u32 reload;
#endifSysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8); //选择外部时钟 HCLK/8fac_us=SystemCoreClock/8000000; //为系统时钟的1/8 #ifdef OS_CRITICAL_METHOD //如果OS_CRITICAL_METHOD定义了,说明使用ucosII了.reload=SystemCoreClock/8000000; //每秒钟的计数次数 单位为K reload*=1000000/OS_TICKS_PER_SEC;//根据OS_TICKS_PER_SEC设定溢出时间//reload为24位寄存器,最大值:16777216,在72M下,约合1.86s左右 fac_ms=1000/OS_TICKS_PER_SEC;//代表ucos可以延时的最少单位 SysTick->CTRL|=SysTick_CTRL_TICKINT_Msk; //开启SYSTICK中断SysTick->LOAD=reload; //每1/OS_TICKS_PER_SEC秒中断一次 SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk; //开启SYSTICK
#elsefac_ms=(u16)fac_us*1000;//非ucos下,代表每个ms需要的systick时钟数
#endif
} #ifdef OS_CRITICAL_METHOD //使用了ucos
//延时nus
//nus为要延时的us数.
void delay_us(u32 nus)
{ u32 ticks;u32 told,tnow,tcnt=0;u32 reload=SysTick->LOAD; //LOAD的值 ticks=nus*fac_us; //需要的节拍数 tcnt=0;told=SysTick->VAL; //刚进入时的计数器值while(1){tnow=SysTick->VAL; if(tnow!=told){ if(tnow<told)tcnt+=told-tnow;//这里注意一下SYSTICK是一个递减的计数器就可以了.else tcnt+=reload-tnow+told; told=tnow;if(tcnt>=ticks)break;//时间超过/等于要延迟的时间,则退出.} };
}
//延时nms
//nms:要延时的ms数
void delay_ms(u16 nms)
{ if(OSRunning==TRUE)//如果os已经在跑了 { if(nms>=fac_ms)//延时的时间大于ucos的最少时间周期 {OSTimeDly(nms/fac_ms);//ucos延时}nms%=fac_ms; //ucos已经无法提供这么小的延时了,采用普通方式延时 }delay_us((u32)(nms*1000)); //普通方式延时,此时ucos无法启动调度.
}
#else//不用ucos时
//延时nus
//nus为要延时的us数.
void delay_us(u32 nus)
{ u32 temp; SysTick->LOAD=nus*fac_us; //时间加载 SysTick->VAL=0x00; //清空计数器SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //开始倒数 do{temp=SysTick->CTRL;}while(temp&0x01&&!(temp&(1<<16)));//等待时间到达 SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //关闭计数器SysTick->VAL =0X00; //清空计数器
}
//延时nms
//注意nms的范围
//SysTick->LOAD为24位寄存器,所以,最大延时为:
//nms<=0xffffff*8*1000/SYSCLK
//SYSCLK单位为Hz,nms单位为ms
//对72M条件下,nms<=1864
void delay_ms(u16 nms)
{ u32 temp; SysTick->LOAD=(u32)nms*fac_ms;//时间加载(SysTick->LOAD为24bit)SysTick->VAL =0x00; //清空计数器SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //开始倒数 do{temp=SysTick->CTRL;}while(temp&0x01&&!(temp&(1<<16)));//等待时间到达 SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //关闭计数器SysTick->VAL =0X00; //清空计数器
}
#endif硬件设计
使用元器件:
单片机:STM32;
添加图片注释,不超过 140 字(可选)
流程图:
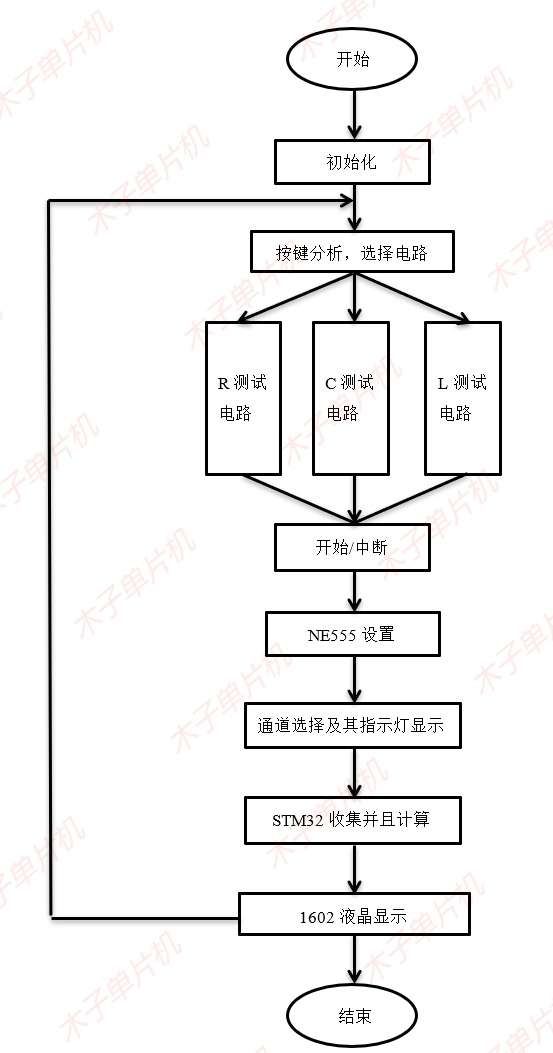
添加图片注释,不超过 140 字(可选)
设计资料
01原理图
本系统原理图采用Altium Designer19设计,具体如图!
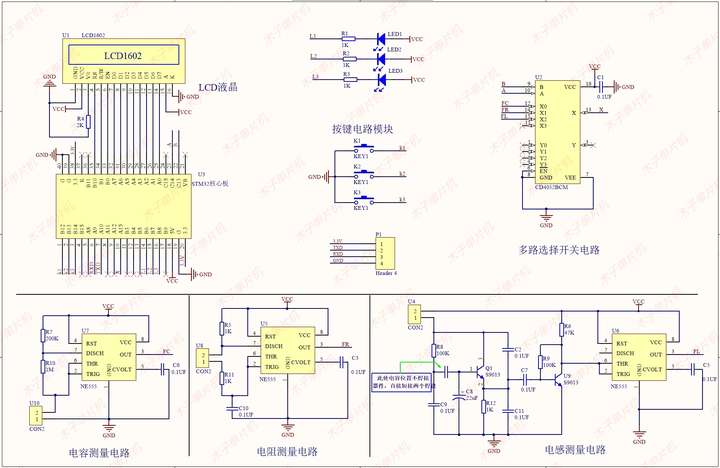
添加图片注释,不超过 140 字(可选)
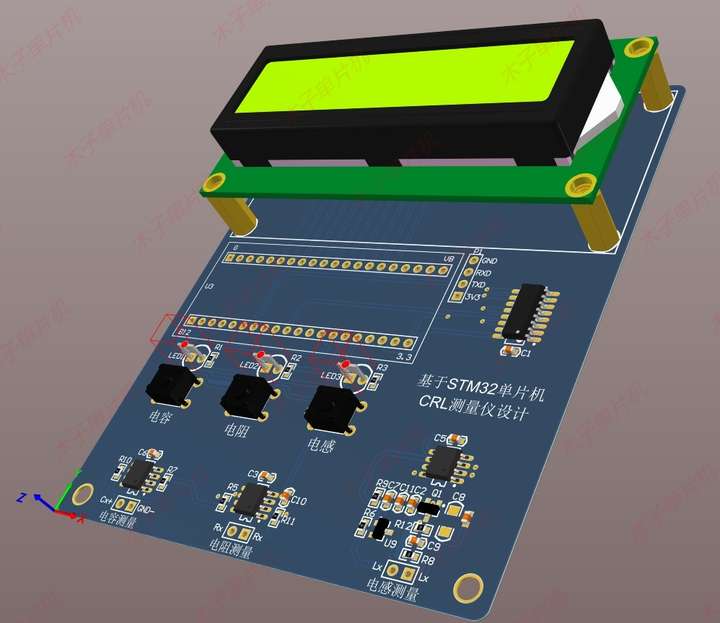
02PCB
本系统pcb采用Altium Designer19设计,具体如图!
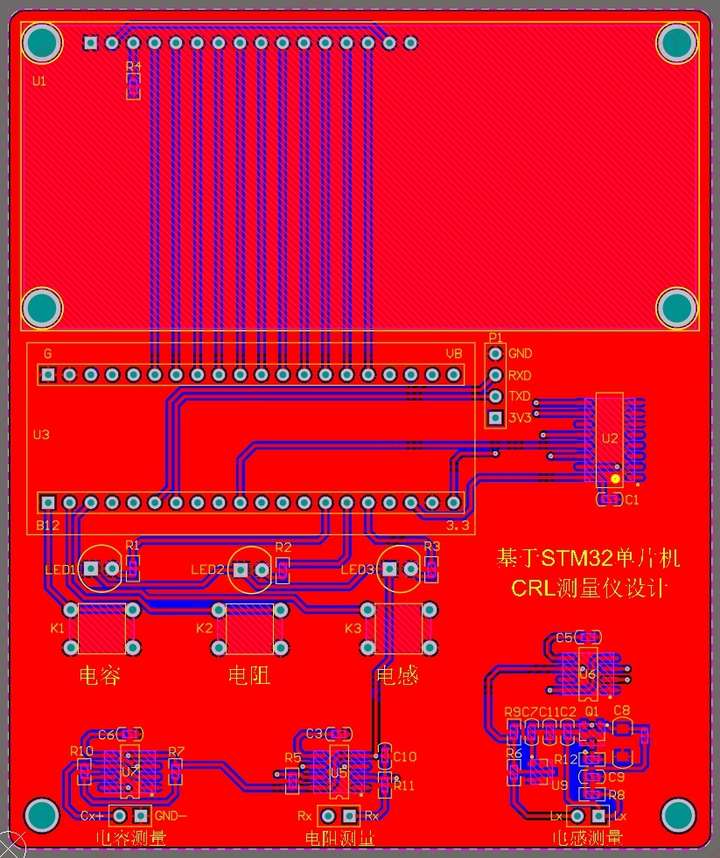
添加图片注释,不超过 140 字(可选)
03程序
本设计使用软件Keil5 MDK版本编程设计!具体如图!
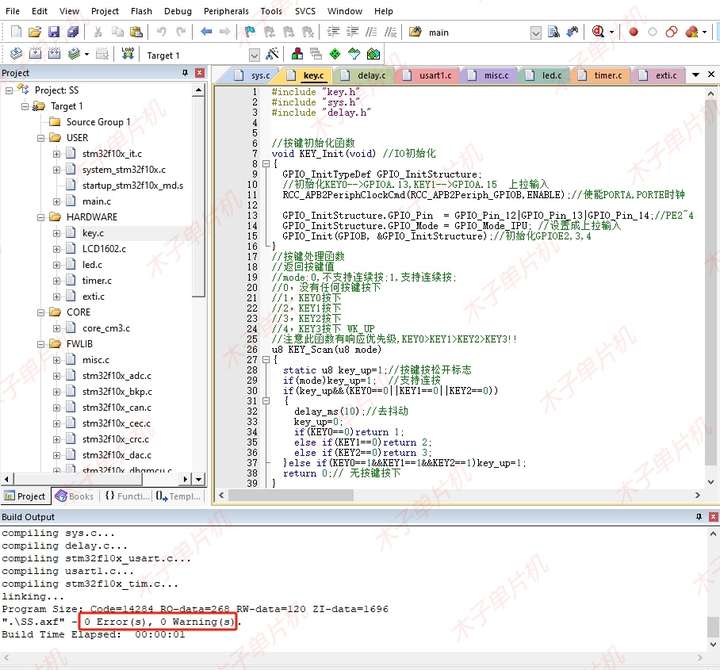
添加图片注释,不超过 140 字(可选)
04设计报告
一万五千字设计报告,具体如下!
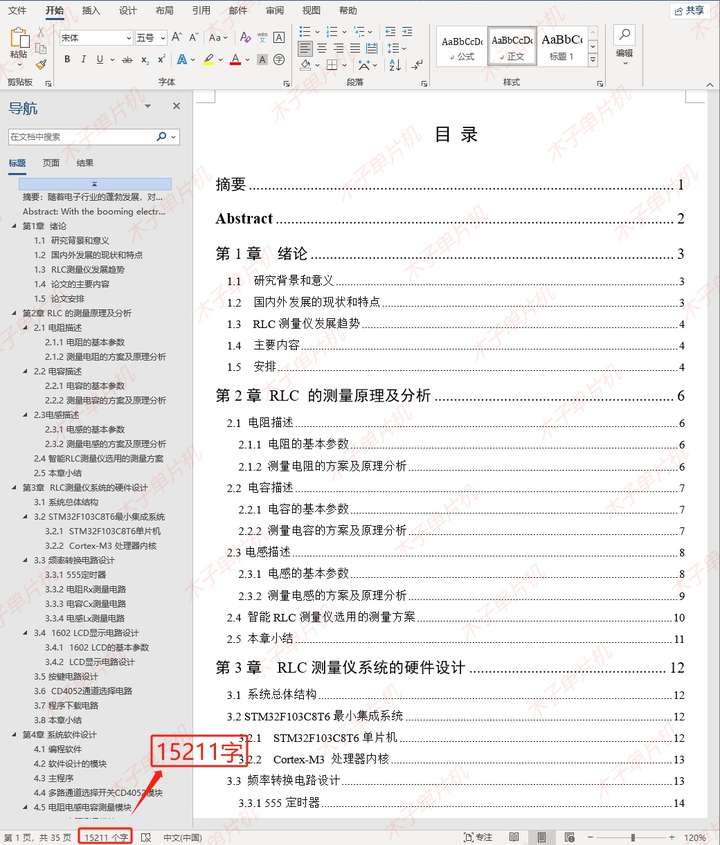
添加图片注释,不超过 140 字(可选)
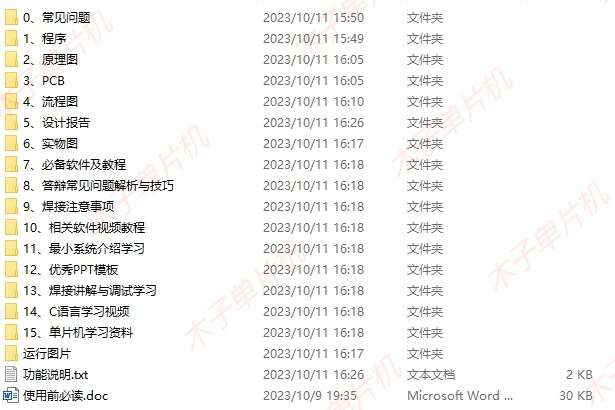
05设计资料
全部资料包括程序(含注释)、AD原理图、PCB、设计报告、流程图、实物图等。具体内容如下,全网最全! !
添加图片注释,不超过 140 字(可选)
点赞分享一起学习成长。