2.6 激光雷达消息格式
新建终端,执行命令
roslaunch wpr_simulation wpb_simple.launch 在新建终端,执行命令
roslaunch wpr_simulation wpb_rviz.launch显示/Scan话题消息,后面的参数是noarr无数组,防止刷屏
rostopic echo /scan --noarr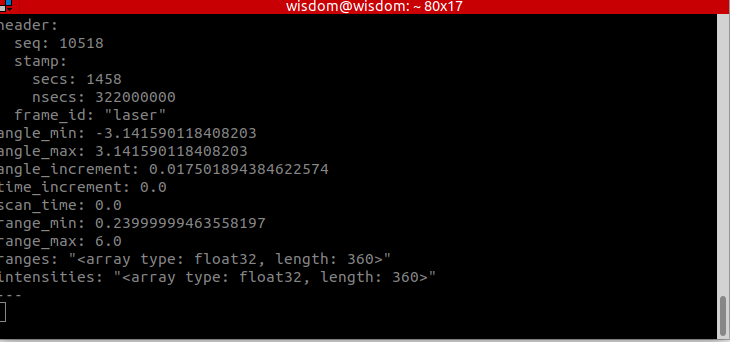
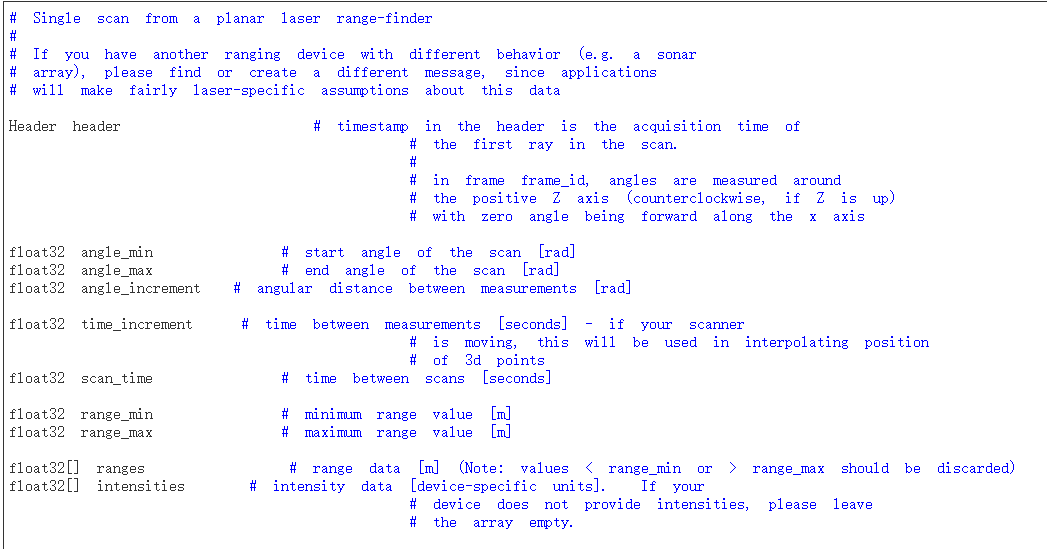
参考官方网址Ros index的文档解释:sensor_msgs/LaserScan Documentation (ros.org)
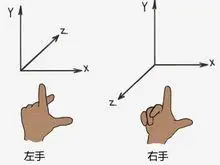
顺便补充一下右手坐标系
食指为X,中指为Y,大拇指为Z
还有右手螺旋法则确定旋转的方向