IO扩展的一种简易方法
74HC595的基本原理
74HC595是一款8位串行输入、并行输出的移位寄存器芯片,常用于微控制器的IO扩展。通过SPI或类似协议,可以将数据逐位输入,最终锁存输出到8个并行引脚上。级联多片595可扩展更多IO口。
硬件连接方法
将74HC595的串行数据输入(DS)接MCU的MOSI引脚,时钟(SHCP)接SCK,锁存信号(STCP)接任意GPIO。级联时,前一片的串行输出(QH’)接下一片的SER引脚。
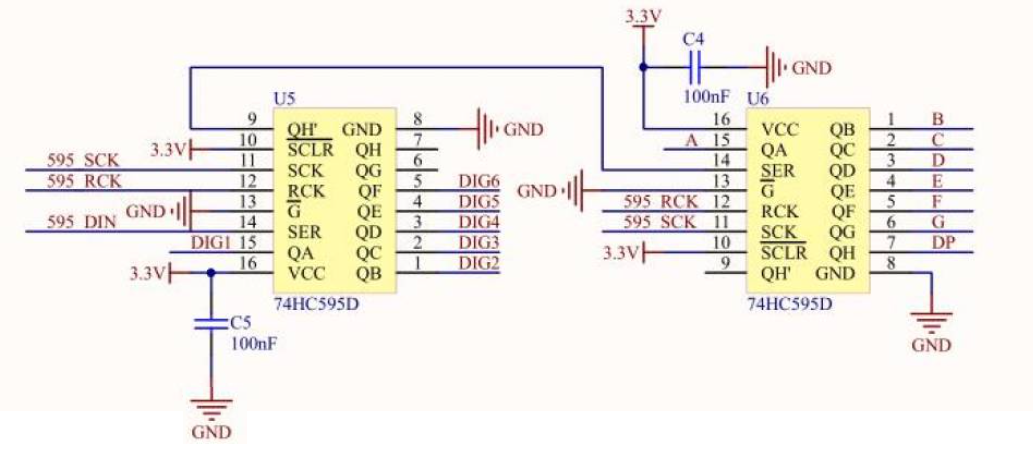
VCC和GND需稳定供电,输出使能(OE)接地,主复位(MR)接高电平。每个输出引脚可驱动LED或通过晶体管控制更高负载。
软件驱动实现
以下为Arduino示例代码,实现数据串行输出:
const int dataPin = 2; // DS
const int latchPin = 3; // STCP
const int clockPin = 4; // SHCPvoid setup() {pinMode(dataPin, OUTPUT);pinMode(latchPin, OUTPUT);pinMode(clockPin, OUTPUT);
}void shiftOut(byte data) {digitalWrite(latchPin, LOW);shiftOut(dataPin, clockPin, MSBFIRST, data); // 内置函数digitalWrite(latchPin, HIGH); // 锁存数据到输出
}
STM32程序
头文件
#ifndef _74HC595_H_
#define _74HC595_H_#include "stm32f10x.h"
#include "io_bit.h"
#include "delay.h"#define SRCLK PAout(14)
#define RCLK PAout(13)
#define SER PAout(12)void HC595_Pin_Init(void);
void HC595_Send_Data(u8 data);
void HC595_Send_Byte(u8 dat1,u8 dat2,u8 dat3,u8 dat4);#endif
源文件
#include "74HC595.h"void HC595_Pin_Init(void)
{GPIO_InitTypeDef GPIO_InitStructure;//打开时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);// 改变指定管脚的映射 GPIO_Remap_SWJ_Disable SWJ 完全禁用(JTAG+SW-DP)GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable , ENABLE);// 改变指定管脚的映射 GPIO_Remap_SWJ_JTAGDisable ,JTAG-DP 禁用 + SW-DP 使能GPIO_PinRemapConfig(GPIO_Remap_SWJ_Disable, ENABLE);GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12 | GPIO_Pin_13 | GPIO_Pin_14;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);GPIO_ResetBits(GPIOA, GPIO_Pin_12 | GPIO_Pin_13 | GPIO_Pin_14);
}void HC595_Send_Data(u8 data)
{u8 i = 0;for (i = 0; i < 8; i++){if (data & 0x80) //先传输高位,通过与运算判断第八是否为1SER = 1; //如果第八位是1,则与 595 DS连接的引脚输出高电平else //否则输出低电平SER = 0;SRCLK = 0;delay_us(20);SRCLK = 1;data <<= 1;}
}void HC595_Send_Byte(u8 dat1,u8 dat2,u8 dat3,u8 dat4)
{SRCLK = 1;RCLK = 1;HC595_Send_Data(dat1);HC595_Send_Data(dat2);HC595_Send_Data(dat3);HC595_Send_Data(dat4);RCLK = 0;delay_us(2);RCLK = 1;delay_us(2);RCLK = 0;}
级联扩展技巧
级联两片595时,发送16位数据,先发送第二片的数据(高8位),再发送第一片数据(低8位)。锁存信号共用,数据连续传输后统一锁存。
计算公式:
若级联N片595,总IO数 = 8 × N
数据发送顺序:第N片数据最先发送,第1片数据最后发送。
注意事项
- 输出电流限制:单引脚最大35mA,总输出不超过70mA;
- 电平匹配:确保MCU与595的电压一致(通常5V或3.3V);
- 时序问题:高速通信时需检查时钟频率(74HC595最高约100MHz);
- 消隐处理:驱动感性负载(如继电器)时,增加续流二极管。
通过上述方法,可低成本实现多路IO控制,适用于LED矩阵、数码管驱动等场景。