视觉slam--三维刚体运动
线性代数
向量的反对称矩阵
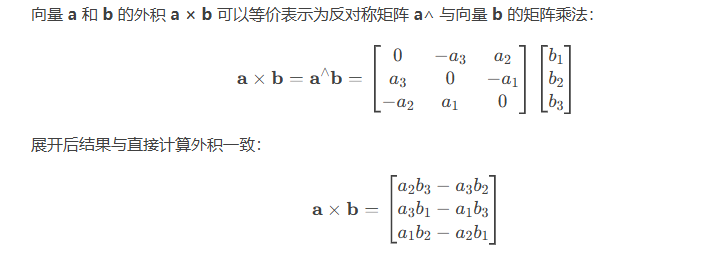
对于三维向量 a = [a₁, a₂, a₃]ᵀ,可以定义一个对应的反对称矩阵 a∧(记作 [a]×):

外积与矩阵乘法的等价性
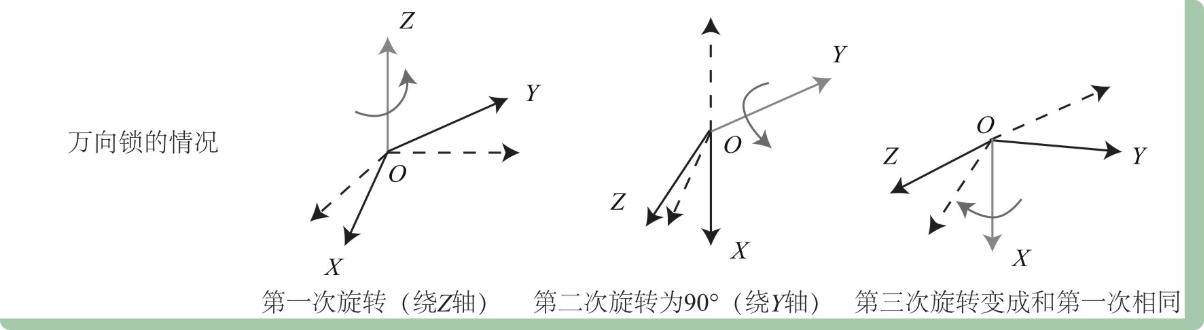
欧拉角的奇异性--万向死锁
现象
第二个轴旋转度,会导致第三个旋转轴和恶原始坐标轴的第一个旋转轴重合,导致第一次旋转与第三次旋转都使用了同一个轴进行旋转,也就是本质上旋转三次,但是只在两个自由度上旋转。
eg:
如下图,第二次的绕Y转90度之后,X就变到了初始坐标系下的Z轴方向上,第三次的绕X轴旋转,本质上还是绕空间中的这个坐标系的初始坐标的Z轴的自由度旋转。丢失了一个自由度。
丢失一个自由度会导致什么问题
(1)旋转耦合
自由度丢失,导致第三次旋转的效果丢失,在最终的旋转矩阵中没有表现出来,也导致旋转矩阵中第一次旋转和第二次旋转的旋转角耦合,无法分离出角度。
(2) 控制指令冲突
-
如果系统试图调整航向(ψ),实际会影响横滚(ϕ),反之亦然。
-
示例(无人机):
-
飞控发送“增加航向角”指令,但实际可能同时改变横滚角,导致机体失控
-
解决方案
(1) 使用四元数(Quaternion)
-
优势:四元数通过4D空间描述旋转,无奇异性问题,适合连续旋转和插值(如球面线性插值SLERP)。
-
转换方法:欧拉角可转换为四元数处理,但需注意归一化和插值路径。