基于RT-DETR算法的夜间交通车辆与行人目标检测
基于RT-DETR算法的夜间交通车辆与行人目标检测:智能交通的未来
文末有完整代码数据集获取方式
随着智能交通系统(ITS)的发展,实时、高效的交通监控成为了城市安全管理的重要一环。尤其是在夜间,低光照、复杂天气条件等因素使得传统的目标检测算法面临巨大的挑战,如何在夜间环境中准确地识别车辆和行人,成为智能交通系统中亟待解决的痛点。
痛点:夜间检测困难,传统方法效率低
在夜间,交通监控摄像头拍摄的图像普遍存在光照不足、噪声大、对比度低等问题。传统的基于特征提取的目标检测方法往往难以应对这些复杂的环境条件,导致以下痛点:
- 低光照环境下检测精度差:夜间的光照条件远不如白天清晰,传统的图像处理方法难以准确提取车辆和行人的特征,识别精度严重下降。
- 高噪声影响:低光照环境下的摄像头容易捕捉到较多噪声,影响目标检测算法的稳定性和准确性。
- 实时性要求高:交通监控系统需要对车辆和行人进行实时监控和处理,传统的目标检测方法往往计算量大,难以满足实时性要求。
这些痛点不仅影响了交通管理的效率,也带来了安全隐患。
解决方案:RT-DETR算法助力夜间目标检测
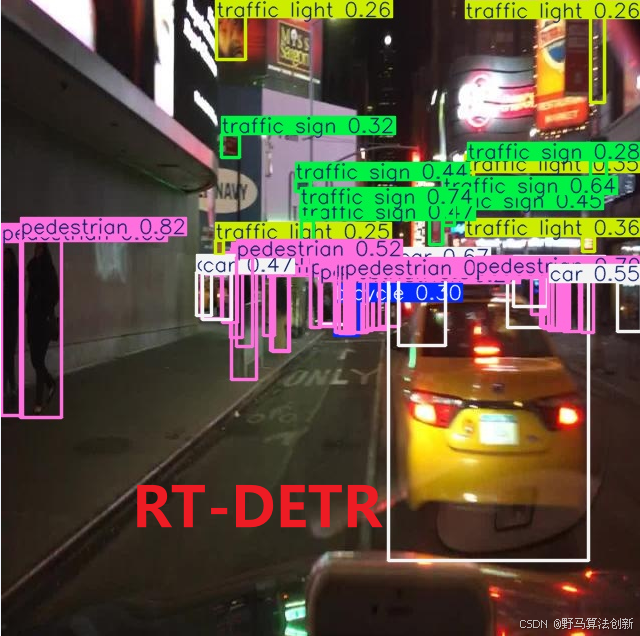
针对夜间交通监控中的种种挑战,基于RT-DETR(Real-Time Detection Transformer)算法的目标检测方法脱颖而出。RT-DETR是深度学习领域中最新的一项突破,它结合了Transformer模型和卷积神经网络(CNN),能够高效、精确地进行目标检测,尤其在低光照条件下表现尤为突出。
RT-DETR的优势:
- 高效处理低光照环境:RT-DETR利用自注意力机制(Self-Attention)可以有效处理低光照环境下的图像特征,即使在图像对比度较低的情况下,依然能够准确识别车辆和行人。
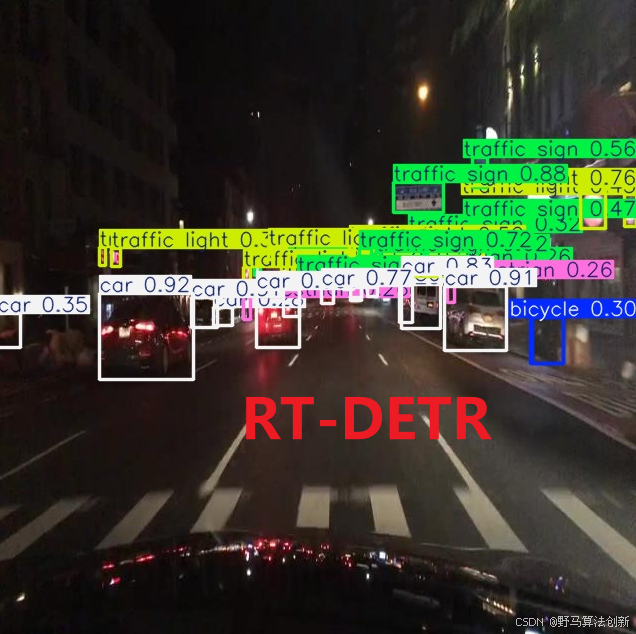
- 高精度目标检测:通过Transformer架构的优势,RT-DETR能够精准地检测图像中的目标位置和类别,无论是静止的车辆,还是行驶中的交通工具,都能清晰识别。
- 实时检测性能:RT-DETR能够提供接近实时的检测速度,满足智能交通系统对高效处理和响应的需求。无论是交通摄像头的图像数据,还是实时交通流量的分析,RT-DETR都能快速给出结果。
- 噪声抑制能力强:在噪声较大的环境下,RT-DETR凭借其强大的特征提取能力,能够有效过滤掉无关噪声,专注于目标本身,确保检测精度。
完整数据集:推动模型训练与优化
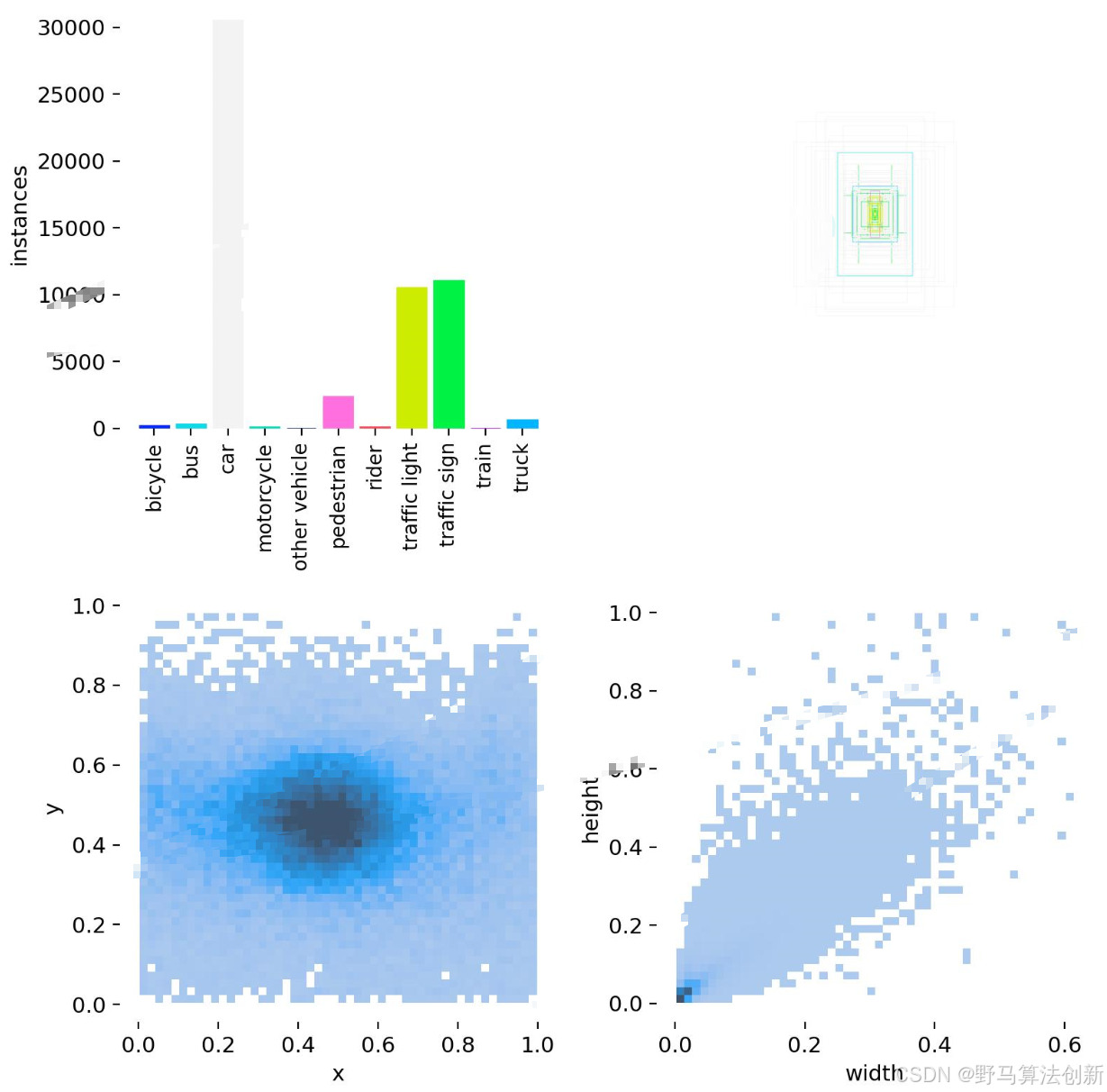
为了提升RT-DETR在夜间交通监控中的检测能力,使用一个高质量的、经过精确标注的数据集至关重要。数据集包含了大量在夜间复杂光照和天气条件下拍摄的交通图像,并对每一张图像中的车辆、行人等目标进行了详细标注。
数据集特点:
- 多样性:数据集包含了多种不同类型的车辆(如轿车、卡车、摩托车等)和行人,以及各种复杂天气条件(如雾霾、雨天、夜间等)下的交通场景。
- 高质量标注:每一张图像都经过专业人员手工标注,标注内容包括目标的类型、位置和边界框等信息,确保数据的高质量和准确性。
- 大规模:数据集包含成千上万张图像,涵盖了不同时间、地点和光照条件下的交通场景,确保训练出的模型具有较好的泛化能力。
应用场景:智能交通与安全管理
基于RT-DETR算法的夜间目标检测技术,能够为智能交通系统带来巨大的变革。以下是其主要应用场景:
- 智能交通监控:通过RT-DETR算法,交通监控摄像头可以在夜间实时准确地检测到车辆和行人,为交通管理提供精准的数据支持,确保交通秩序的稳定。
- 自动驾驶系统:自动驾驶车辆需要高精度的目标检测系统来识别周围环境中的行人、其他车辆等障碍物。RT-DETR能够在低光照环境下保证高效的识别和反应速度,是自动驾驶系统的重要组成部分。
- 城市安全管理:通过在城市重点区域部署夜间监控摄像头,RT-DETR能够实时检测并识别潜在的安全威胁,例如违规停车、交通事故等,有效提升城市的治安管理能力。