汽车免拆诊断案例 | 2010款捷豹XFL车制动警告灯、DSC警告灯异常点亮
故障现象
一辆2010款捷豹XFL车,搭载3.0 L发动机,累计行驶里程约为35万km。车主反映,该车组合仪表上的制动警告灯、动态稳定控制系统(DSC)警告灯异常点亮(图1),且提示“DSC NOT AVAILABLE (DSC不可用)”。

图1 故障时的组合仪表
故障诊断
使用故障检测仪检测,在ABS控制单元中存储有故障代码“U0074-13 控制模块通信总线B 断开-断路”(图2),且无法清除。
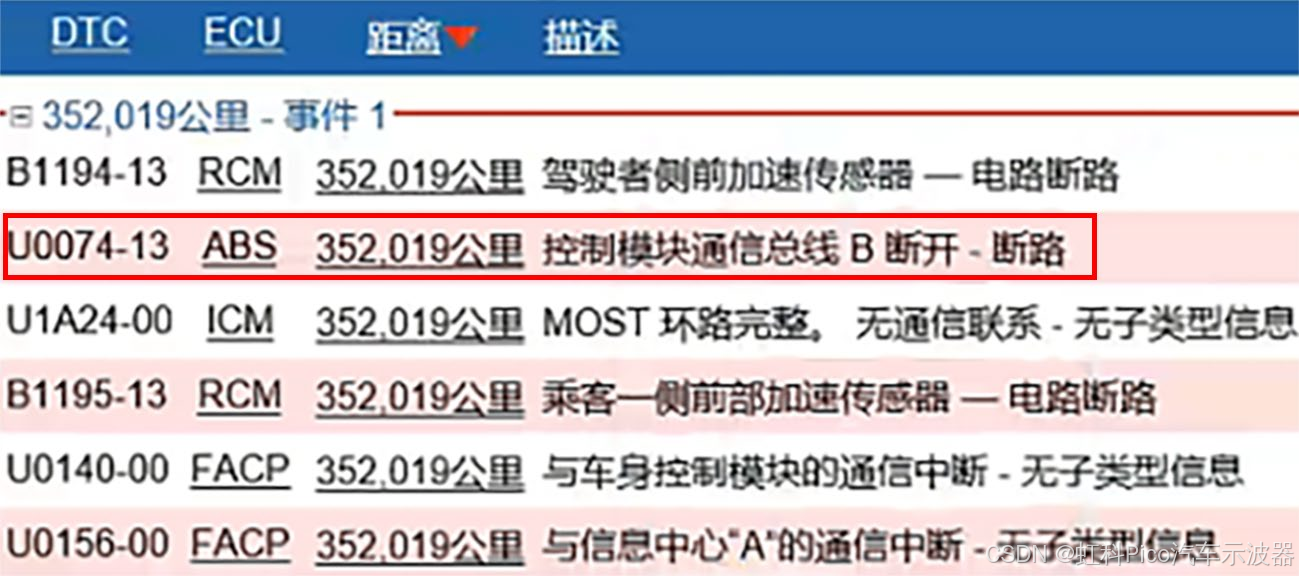
图2 存储的故障代码
查看维修手册上关于故障代码“U0074-13”的说明,提示检查偏航速率和横向加速度传感器与ABS控制单元之间的专用高速CAN总线是否存在断路。
偏航速率和横向加速度传感器用于测量车辆的偏航速率和横向加速度,并将测量结果通过专用高速CAN 总线传递给ABS控制单元。偏航速率和横向加速度传感器安装在后行李架上,由2颗螺栓固定,其控制电路如图3 所示。
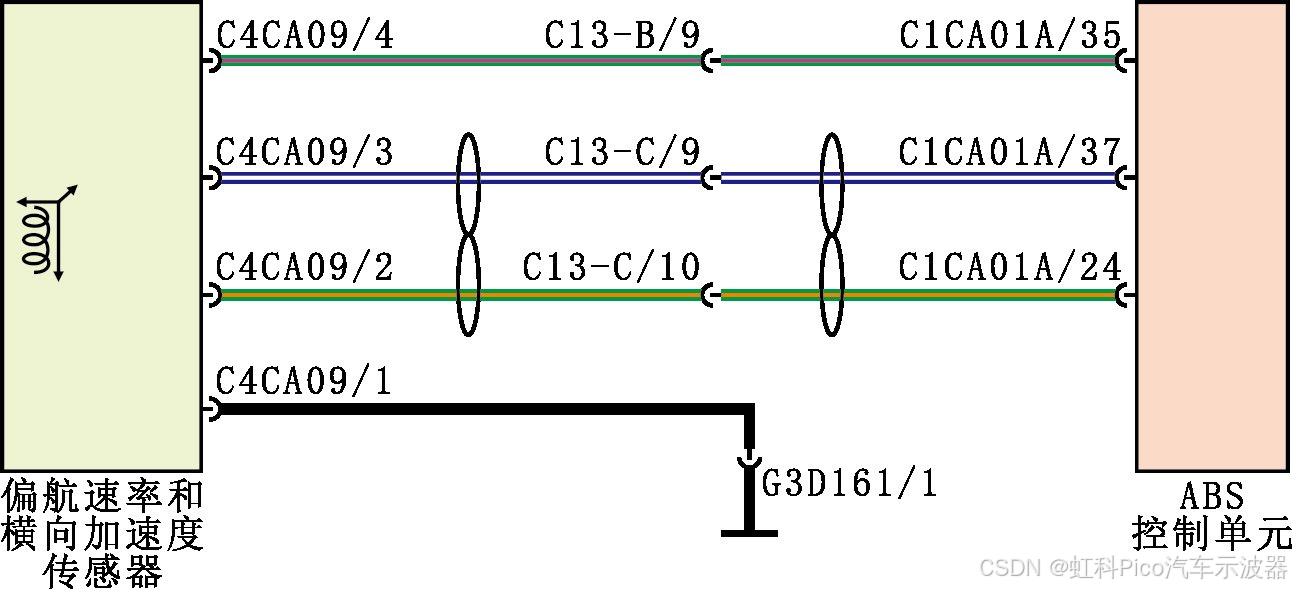
图3 偏航速率和横向加速度传感器控制电路
用万用表测量偏航速率和横向加速度传感器专用高速CAN总线的信号电压,CAN H信号电压为2.5 V,CAN L 信号电压为1.4 V,均偏低。用Pico示波器测量偏航速率和横向加速度传感器专用高速CAN总线的信号波形(图4),发现CAN L信号明显异常,CAN H 与CAN L的信号电压均被明显拉低,且偶尔会同时降低至0.7 V左右,由此怀疑偏航速率和横向加速度传感器专用高速CAN总线对搭铁短路。
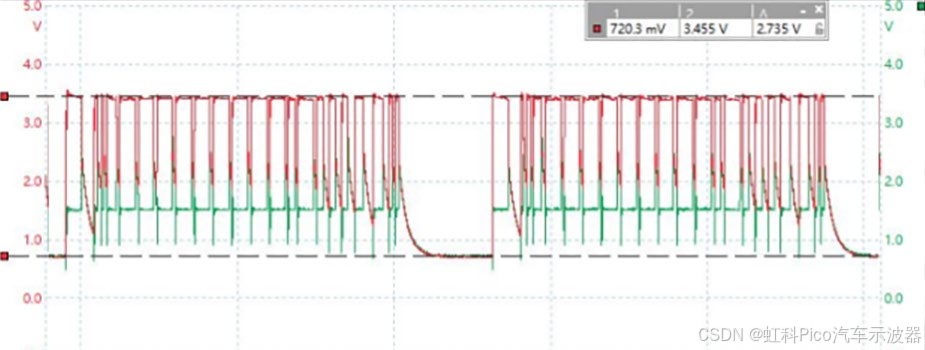
图4 异常的专用高速CAN总线信号波形
脱开导线连接器C13-C,发现ABS控制单元侧的专用高速CAN总线信号波形恢复正常(图5),而偏航速率和横向加速度传感器侧的专用高速CAN总线信号波形异常,CAN H与CAN L的信号电压均为一条0 V的直线。

图5 正常的专用高速CAN总线信号波形
案例刊于:《汽车维护与修理》杂志 2024·11 上半月刊
案例作者:蔡永福