无人机定位系统技术设计与难点突破!
一、技术设计核心要点
1. 高精度定位模块
GNSS-RTK/PPK技术:采用u-blox ZED-F9P等模块,通过实时动态定位(RTK)或后处理动态定位(PPK),将绝对位置精度提升至厘米级(3-5 cm),比传统GPS精度高100倍。
双天线测向:利用双天线抗电磁干扰,在高压线、金属建筑等强磁环境中保持稳定定位,水平精度达1cm+1ppm。
2. 多源融合定位系统
视觉-惯性里程计(VIO):VIOBOT模块融合双目相机与IMU数据,实现室内10cm精度的位姿估计,通过网口低延迟传输数据。
5G+北斗无缝切换:北京邮电大学团队开发的技术,结合视觉与通信网络,解决室内外定位盲区,实现厘米级连续定位。
粒子滤波+卡尔曼滤波:融合视觉检测、IMU及无线电测距数据,通过粒子滤波预测位置,卡尔曼滤波平滑轨迹。
3. 环境自适应系统
视觉精度动态判定:通过环境检测模块计算视觉精度因子(AC),自动切换定位模式。
抗干扰通信链路:采用2.4GHz/900MHz FHSS电台,支持15km远程双向通信,抗干扰性强。
4. 轻量化边缘计算
YOLOv8目标检测:针对无人机小目标优化模型,结合数据增强提升复杂环境(眩光、遮挡)下的识别鲁棒性。
模块化硬件设计:如P450无人机搭载VIOBOT模块,通过网口连接机载计算机,减少初始化步骤,提升响应速度。
二、运行方式与工作流程
1. 室外场景
GNSS主导:优先使用RTK-GNSS获取厘米级定位,数传电台同步位置至地面站。
异常切换:遇信号遮挡或干扰时,自动启用视觉-IMU融合定位作为补充。
2. 室内/复杂环境
VIO/SLAM定位:依赖双目相机与IMU实时构建点云地图,输出位姿数据(如VIOBOT模块)。
5G+北斗辅助:通过室内基站与卫星信号融合,消除导航盲区。
3. 协同编队控制
动态队形规划:基于A*/RRT算法实时调整队形(行列、圆形、V形),同步控制LED灯光。
多机相对定位:利用YOLOv8识别邻机编号,结合无线测距修正相对位置。
4. 安防预警应用
三级防御机制:
800米外:AI识别预警;
500米内:追踪锁定轨迹;
100米近界:启动安全反制。
三、关键难点与突破点
1. 室内外无缝切换
难点:建筑物遮挡导致卫星信号丢失,定位中断。
突破:“5G+北斗”技术通过多源信息融合实现连续定位,误差降至厘米级。
2. 复杂环境抗干扰
难点:电磁干扰(高压线)、恶劣天气(雨雪)降低定位可靠性。
突破:
双天线测向技术抗磁干扰;
环境检测模块动态计算AC因子,自动启用红外/雷达补偿定位。
干扰对策对比表:
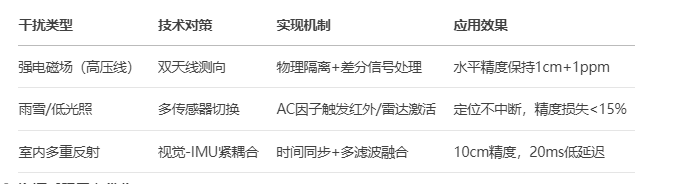
3. 资源受限平台优化
难点:边缘设备算力有限,难以实时处理多传感器数据。
突破:
YOLOv8采用深度可分离卷积,计算量减少40%;
VIOBOT模块硬件-算法协同设计,开机即用无需调试。
4. 高空目标高度误差
难点:地面雷达垂直基线短,高度方向精度不足。
突破:WLS-ER算法融合双基地距离(BR)与空间角(SA)测量,高度误差降低62%。
四、前沿技术创新
WLS-ER闭式解算法:通过加权最小二乘粗估计与误差缩减两步优化,理论证明渐近达到克拉美罗下界,显著提升高空定位精度。
被动频谱感知:铁路防控系统采用被动侦测模式,避免主动信号干扰行车通信,实现“零干扰”反制。
仿生抗干扰设计:参考生物神经网络的脉冲控制模型,提升复杂电磁环境下的系统稳定性(延伸研究方向)。
