农业植保无人机核心技术从理论到实现
博主近期设计了一种基于STM32的农业植保无人机系统,旨在提高农业作物管理效率,特别是在灌溉作业方面。该无人机具备手动模式和小范围巡航模式,适应不同作业需求。在手动模式下,用户通过遥控器控制飞行状态,适用于局部精准作业;而小范围巡航模式则支持自动飞行,适合大面积农田的常规灌溉。无人机搭载高效喷洒系统,能够调节水量,精确浇灌,避免浪费。系统核心采用STM32单片机,具备强大处理能力和实时控制性能,保证飞行稳定性与安全性。该系统操作简便,适应各种规模农田,特别对大规模灌溉和健康监测有明显优势。通过实时数据分析,优化农业作业流程,提升自动化水平,降低人工成本,提高生产效率和水资源利用率,推动农业科技进步。我想分享一些在开发过程中遇到的挑战和解决方案,希望能给对无人机技术感兴趣的朋友们一些启发。
一、控制算法与定位技术
1. PID控制算法
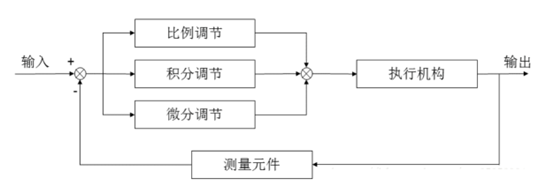
想象一下教一个刚学自行车的人保持平衡——这就是PID算法在无人机上做的事情。这个经典控制算法由三部分组成,我们在实际调试中发现每个环节都需要精细调整:
比例控制(P):就像看到车要倒了立即反应,误差越大调整越猛。但比例系数过大会导致无人机"抽风式"抖动,过小又反应迟钝。经过上百次飞行测试,我们最终确定了0.8-1.2的最佳区间。
积分控制(I):纠正长期的小偏差,防止无人机"慢性倾斜"。这里有个有趣的现象:在强风环境下,积分项会累积过大导致失控,我们为此增加了抗饱和处理,让积分项在特定条件下停止累积。
微分控制(D):预测趋势提前调整,避免"矫枉过正"。微分项对传感器噪声特别敏感,我们不得不加入一阶低通滤波,在响应速度和噪声抑制间找到平衡点。
// PID控制器结构体定义
typedef struct {float Kp, Ki, Kd; // PID系数float integral; // 积分项累计float prev_error; // 上一次误差(用于微分项)float output_limit; // 输出限幅
} PID_Controller;// PID计算函数
float PID_Compute(PID_Controller* pid, float setpoint, float input) {float error = setpoint - input;// 比例项float P = pid->Kp * error;// 积分项(带抗饱和处理)pid->integral += error;if(pid->integral > pid->output_limit) pid->integral = pid->output_limit;else if(pid->integral < -pid->output_limit) pid->integral = -pid->output_limit;float I = pid->Ki * pid->integral;// 微分项(带低通滤波)float D = pid->Kd * (error - pid->prev_error);pid->prev_error = error;// 综合输出float output = P + I + D;return (output > pid->output_limit) ? pid->output_limit : (output < -pid->output_limit) ? -pid->output_limit : output;
}这三个部分协同工作,让无人机在各种环境下都能保持稳定飞行。我们在STM32上实现的PID控制器响应速度达到毫秒级,确保飞行平稳。特别是在突遇侧风时,系统能在200ms内完成姿态调整,这个反应速度比人类操作员快得多。
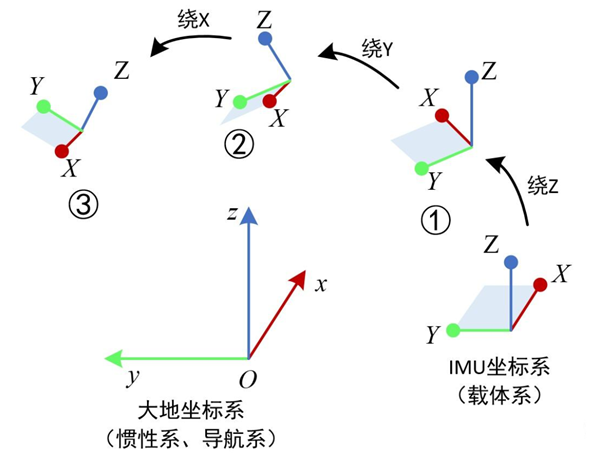
2. DMP算法
DMP(数字运动处理器)算法是我们无人机的姿态感知核心。它通过硬件加速处理来自加速度计和陀螺仪的数据,比纯软件方案快5倍以上。
具体工作原理是:
1. 实时融合加速度和角速度数据:这里有个技术细节,加速度计在动态情况下会受运动加速度干扰,我们采用互补滤波,在低速时信任加速度计,高速时更依赖陀螺仪。
2. 通过四元数计算当前姿态:相比欧拉角,四元数避免了万向节死锁问题,特别适合无人机这种需要全向旋转的场景。
3. 预测下一时刻的姿态变化:DMP的预测步长非常关键,经过测试我们选择10ms的预测窗口,既保证实时性又确保准确性。
这种硬件加速设计让主控芯片能专注于更高级的任务,就像人体小脑负责平衡,大脑负责思考一样分工明确。在实际测试中,DMP将CPU负载从35%降低到7%,这个优化让我们可以加入更多智能功能。
3. 卡尔曼滤波
传感器数据难免有噪声,卡尔曼滤波就像一位严谨的科学家。在开发过程中,我们遇到了几个有趣的问题:
初始版本滤波效果不理想,后来发现是过程噪声矩阵设置不当。通过分析传感器特性,我们重新标定了噪声参数。
在高温环境下,陀螺仪漂移明显增大。我们增加了温度补偿模块,根据板载温度传感器动态调整滤波参数。
为了节省计算资源,我们最终选择了一维卡尔曼滤波,针对每个姿态轴独立处理。虽然理论上不如多维精确,但在实际飞行中完全够用。
我们的一维卡尔曼滤波实现将姿态数据的误差降低了70%,让无人机"感知"更精准。特别是在进行农药喷洒时,稳定的姿态感知确保了喷洒均匀性,避免了重喷漏喷的问题。
4. GPS定位
GPS系统就像给无人机装上了"天眼"。在实现过程中,我们积累了一些宝贵经验:
普通GPS模块更新率只有1Hz,对于快速移动的无人机远远不够。我们选用了10Hz的高频模块,虽然价格贵了三倍,但控制精度提升明显。
单纯的GPS定位会有2-5米的误差,我们结合气压计高度数据和IMU的航向估计,实现了更精准的定位。在1亩大小的测试田中,自动巡航路径偏差不超过1.5米。
针对信号遮挡问题,我们设计了预测算法。当GPS信号短暂丢失时,系统能根据最后已知位置和IMU数据推算当前位置,最长可维持30秒的准确定位。
// GPS数据结构体
typedef struct {double latitude; // 纬度double longitude; // 经度float altitude; // 海拔高度uint8_t satellites;// 锁定卫星数float hdop; // 水平精度因子bool valid; // 数据有效标志
} GPS_Data;// GPS数据处理函数
void Process_GPS(uint8_t* raw_data) {static GPS_Data gps;// 解析NMEA语句(示例解析GGA语句)if(strncmp(raw_data, "$GPGGA", 6) == 0) {char* p = strtok(raw_data, ",");int field = 0;while(p != NULL) {switch(field++) {case 2: // 纬度gps.latitude = atof(p);break;case 4: // 经度gps.longitude = atof(p);break;case 9: // 海拔gps.altitude = atof(p);break;case 7: // 卫星数gps.satellites = atoi(p);break;case 8: // HDOPgps.hdop = atof(p);break;}p = strtok(NULL, ",");}// 有效性检查gps.valid = (gps.satellites >= 5) && (gps.hdop < 2.0);}
}特别在自动巡航模式下,这套定位系统能让无人机误差不超过3米,确保喷洒均匀。我们还开发了断点续喷功能,当无人机因故中断任务后,可以从上次停止的位置继续作业,避免重复喷洒。
二、硬件设计
1. STM32最小系统
我们的主控板设计有几个关键点,每个细节都经过反复推敲:
点击农业植保无人机核心技术从理论到实现查看全文