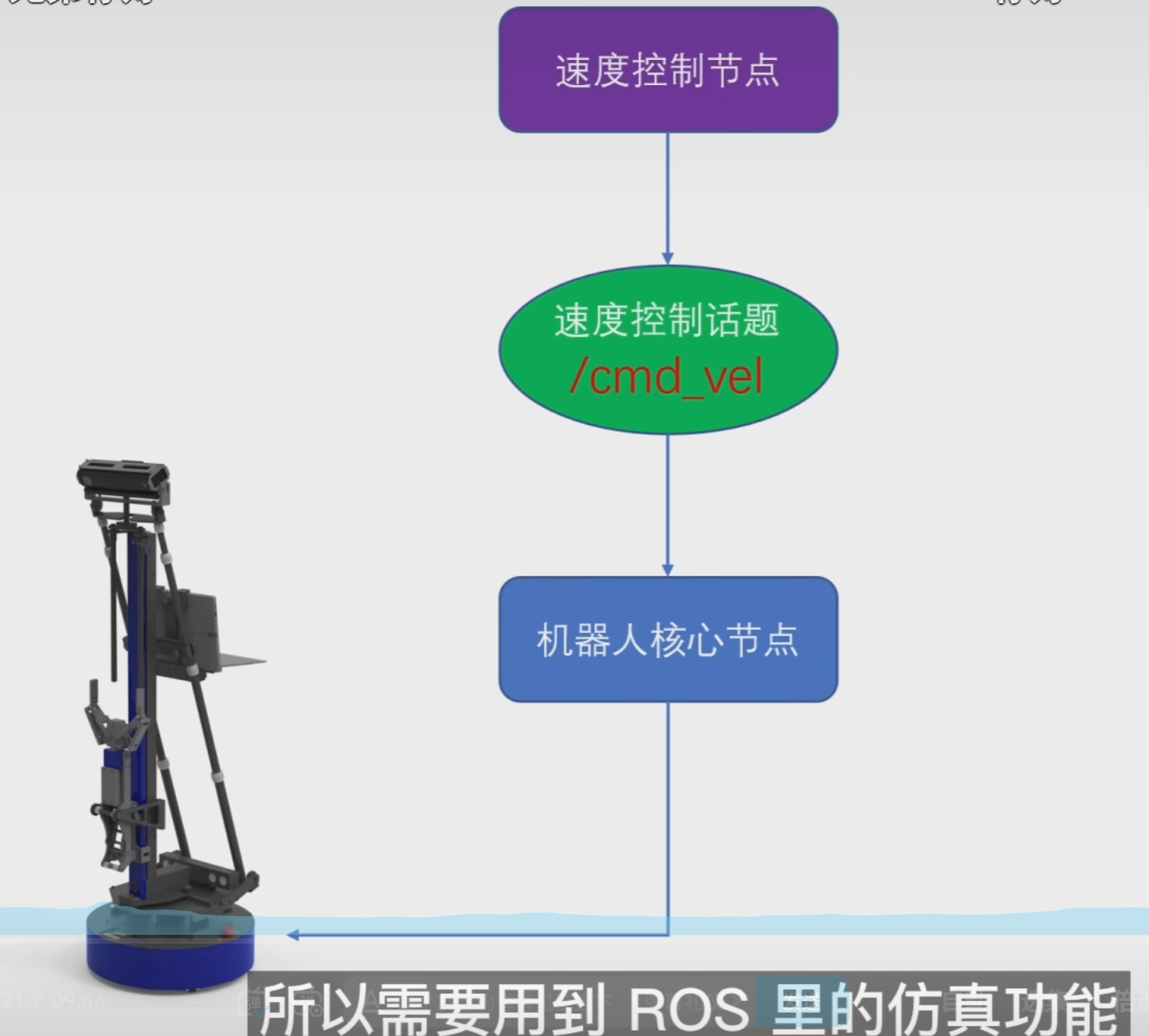
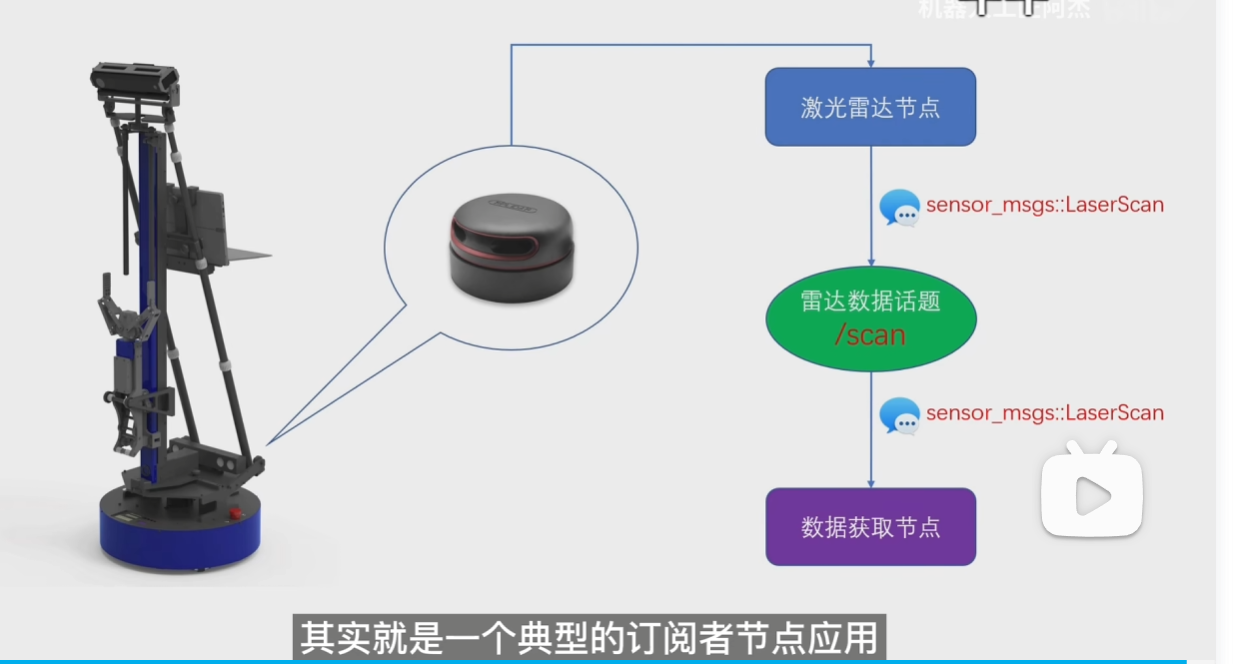
当前位置: 首页 > news >正文 Ros(控制机器人运动) news 2025/6/6 19:41:00 就是 俩节点 一个发布 一个接受。 然后接受方(仿真内 接受到 自动就是电机协议自动启动) )————— 激光雷达接受信息 查看全文 http://www.xdnf.cn/news/871453.html 相关文章: .NET 原生驾驭 AI 新基建实战系列(四):Qdrant ── 实时高效的向量搜索利器 JVMTI 在安卓逆向工程中的应用 【Oracle】存储过程 纹理压缩格式优化 OpenCV 自带颜色表实现各种滤镜 【Netty源码分析总结】 使用 Unstructured 开源库快速入门指南 机器学习:聚类算法 Python爬虫:trafilatura 的详细使用(快速提取正文和评论以及结构,转换为 TXT、CSV 和 XML) Day44打卡 @浙大疏锦行 01-Redis介绍与安装 pyqt5 安装失败 查看服务应用是否有跑起来命令 机器学习算法分类 3D旋转动态爱心 - Python创意代码 MySQL ACID 面试深度解析:原理、实现与面试实战 Pytest+Selenium UI自动化测试实战实例 MCP:AI应用的通用接口,如何重塑大模型与外部系统的连接? 小米又开源了,一个多模态大模型 + 一个生不逢时的推理大模型 CppCon 2015 学习:Bridging Languages Cross-Platform 循环链表与循环队列的区分与对比 防火墙iptables项目实战 Java 二维码 ROS2性能狂飙:C++11移动语义‘偷梁换柱’实战 CSP严格模式返回不存在的爬虫相关文件 C#和C++在编译过程中的文件区分 树莓派上遇到插入耳机后显示“无输入设备”问题 格恩朗椭圆齿轮流量计 精准计量 赋能工业 探索花语的奥秘:全新花语网站上线啦! Elasticsearch中的地理空间(Geo)数据类型介绍