深度学习项目之RT-DETR训练自己数据集
RT-DETR
- 1.模型介绍
- 📌 什么是 RT-DETR ?
- 📖 核心改进点
- 📊 结构示意
- 🎯 RT-DETR 优势
- ⚠️ RT-DETR 缺点
- 📈 应用场景
- 📑 论文 & 官方仓库
- 2.模型框架
- 3.Yaml配置文件
- 4.训练脚本
- 5.训练完成截图
- 6.总结与讨论
1.模型介绍
📌 什么是 RT-DETR ?
RT-DETR(Real-Time Detection Transformer) 是百度和视觉学界联合提出的一种端到端实时目标检测方法,是DETR 系列的加速优化版。
它解决了原始 DETR(2020) 推理慢、收敛慢的问题,让 Transformer-based 检测器能在实时速率下工作,同时保持高精度。
📖 核心改进点
| 模块 | 原始DETR | RT-DETR |
|---|---|---|
| 编码器 | Transformer Encoder | 精简型 Encoder + 动态特征增强 |
| 检测头 | 查询-匹配式 DETR Head | Group-DETR Head(分组预测更高效) |
| 匹配方式 | 匈牙利匹配 | 匈牙利匹配(保留,稳定可靠) |
| 上采样 | FPN特征拼接 | 多层特征解耦动态融合 |
| NMS | 不用(端到端预测) | 不用,直接输出 Top-N 框 |
| 收敛速度 | 极慢(500轮起步) | 极快(50轮左右) |
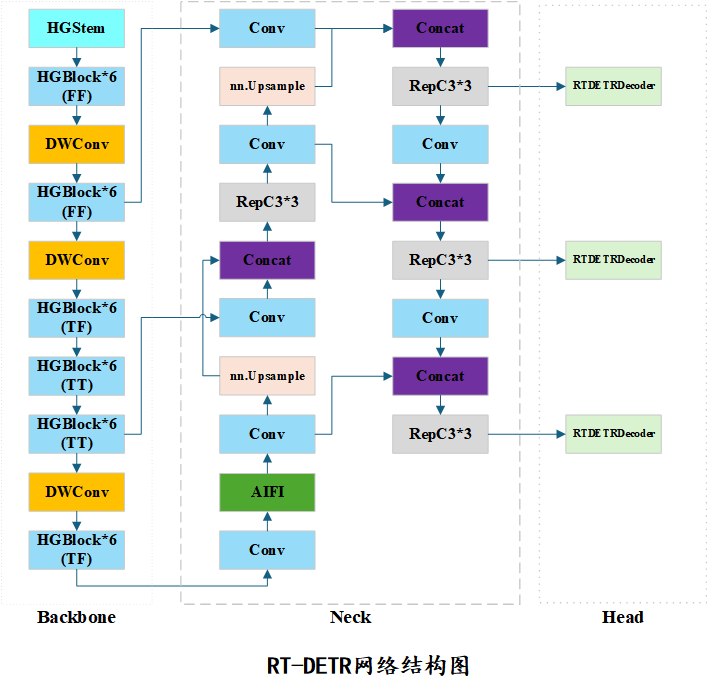
📊 结构示意
🌱 下图是简化结构
输入图像│
Backbone(ResNet/ConvNext)│
Neck(多层特征)│
精简 Transformer Encoder│
Group DETR Head(查询式)│
匈牙利匹配 (训练时)│
直接输出预测结果 (无需NMS)
🎯 RT-DETR 优势
✅ 实时速率,接近 YOLOv8 的 FPS
✅ 端到端,不用NMS、anchor
✅ 精度高,尤其是遮挡、细粒度目标表现优异
✅ 支持多种backbone(ResNet50、ResNet101、ConvNeXt)
✅ 高效、轻量,适合工程部署
⚠️ RT-DETR 缺点
⚠️ 对硬件要求较高(特别是显存)
⚠️ 动态查询 Head 复杂,不如 YOLO 系列直观
⚠️ 小目标场景需微调特征提取策略
📈 应用场景
📦 智能制造缺陷检测
📦 智慧城市交通分析
📦 卫星遥感小目标检测
📦 实时安全监控
📑 论文 & 官方仓库
- 📖 论文:RT-DETR: Real-Time Detection Transformer
- 📦 仓库:PaddleDetection-RT-DETR
2.模型框架
##3.数据集配置
# Ultralytics 🚀 AGPL-3.0 License - https://ultralytics.com/license# COCO128 dataset https://www.kaggle.com/datasets/ultralytics/coco128 (first 128 images from COCO train2017) by Ultralytics
# Documentation: https://docs.ultralytics.com/datasets/detect/coco/
# Example usage: yolo train data=coco128.yaml
# parent
# ├── ultralytics
# └── datasets
# └── coco128 ← downloads here (7 MB)# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]train: /root/DATA/backup/images/train #
val: /root/DATA/backup/images/val# Classes
names:0: person1: bicycle2: car3: motorcycle4: airplane5: bus6: train7: truck8: boat9: traffic light10: fire hydrant11: stop sign12: parking meter13: bench14: bird15: cat16: dog17: horse18: sheep19: cow20: elephant21: bear22: zebra23: giraffe24: backpack25: umbrella26: handbag27: tie28: suitcase29: frisbee30: skis31: snowboard32: sports ball33: kite34: baseball bat35: baseball glove36: skateboard37: surfboard38: tennis racket39: bottle40: wine glass41: cup42: fork43: knife44: spoon45: bowl46: banana47: apple48: sandwich49: orange50: broccoli51: carrot52: hot dog53: pizza54: donut55: cake56: chair57: couch58: potted plant59: bed60: dining table61: toilet62: tv63: laptop64: mouse65: remote66: keyboard67: cell phone68: microwave69: oven70: toaster71: sink72: refrigerator73: book74: clock75: vase76: scissors77: teddy bear78: hair drier79: toothbrush以COCO为例
3.Yaml配置文件
# Ultralytics YOLO 🚀, AGPL-3.0 license
# RT-DETR-l object detection model with P3-P5 outputs. For details see https://docs.ultralytics.com/models/rtdetr# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n-cls.yaml' will call yolov8-cls.yaml with scale 'n'# [depth, width, max_channels]l: [1.00, 1.00, 1024]backbone:# [from, repeats, module, args]- [-1, 1, HGStem, [32, 48]] # 0-P2/4- [-1, 6, HGBlock, [48, 128, 3]] # stage 1- [-1, 1, DWConv, [128, 3, 2, 1, False]] # 2-P3/8- [-1, 6, HGBlock, [96, 512, 3]] # stage 2- [-1, 1, DWConv, [512, 3, 2, 1, False]] # 4-P3/16- [-1, 6, HGBlock, [192, 1024, 5, True, False]] # cm, c2, k, light, shortcut- [-1, 6, HGBlock, [192, 1024, 5, True, True]]- [-1, 6, HGBlock, [192, 1024, 5, True, True]] # stage 3- [-1, 1, DWConv, [1024, 3, 2, 1, False]] # 8-P4/32- [-1, 6, HGBlock, [384, 2048, 5, True, False]] # stage 4head:- [-1, 1, Conv, [256, 1, 1, None, 1, 1, False]] # 10 input_proj.2- [-1, 1, AIFI, [1024, 8]]- [-1, 1, Conv, [256, 1, 1]] # 12, Y5, lateral_convs.0- [-1, 1, nn.Upsample, [None, 2, "nearest"]]- [7, 1, Conv, [256, 1, 1, None, 1, 1, False]] # 14 input_proj.1- [[-2, -1], 1, Concat, [1]]- [-1, 3, RepC3, [256]] # 16, fpn_blocks.0- [-1, 1, Conv, [256, 1, 1]] # 17, Y4, lateral_convs.1- [-1, 1, nn.Upsample, [None, 2, "nearest"]]- [3, 1, Conv, [256, 1, 1, None, 1, 1, False]] # 19 input_proj.0- [[-2, -1], 1, Concat, [1]] # cat backbone P4- [-1, 3, RepC3, [256]] # X3 (21), fpn_blocks.1- [-1, 1, Conv, [256, 3, 2]] # 22, downsample_convs.0- [[-1, 17], 1, Concat, [1]] # cat Y4- [-1, 3, RepC3, [256]] # F4 (24), pan_blocks.0- [-1, 1, Conv, [256, 3, 2]] # 25, downsample_convs.1- [[-1, 12], 1, Concat, [1]] # cat Y5- [-1, 3, RepC3, [256]] # F5 (27), pan_blocks.1- [[21, 24, 27], 1, RTDETRDecoder, [nc]] # Detect(P3, P4, P5)4.训练脚本
# @File: train.py
# @Author: chen_song
# @Time: 2025-06-03 17:55# 10:43开始的
from ultralytics import RTDETR# Load a COCO-pretrained RT-DETR-l model
weigth = r"/root/CS/ultralytics-main/ultralytics/cfg/models/rt-detr/rtdetr-l.yaml"
model = RTDETR(weigth)# Display model information (optional)
model.info()# Train the model on the COCO8 example dataset for 100 epochs
results = model.train(data="/root/CS/ultralytics-main/ultralytics/cfg/datasets/coco.yaml",epochs=100,batch=64,imgsz=640,workers=10,amp=True,project=r'/root/CS/ultralytics-main/runs/train',name='exp',)# Run inference with the RT-DETR-l model on the 'bus.jpg' image
# results = model("path/to/bus.jpg")
5.训练完成截图
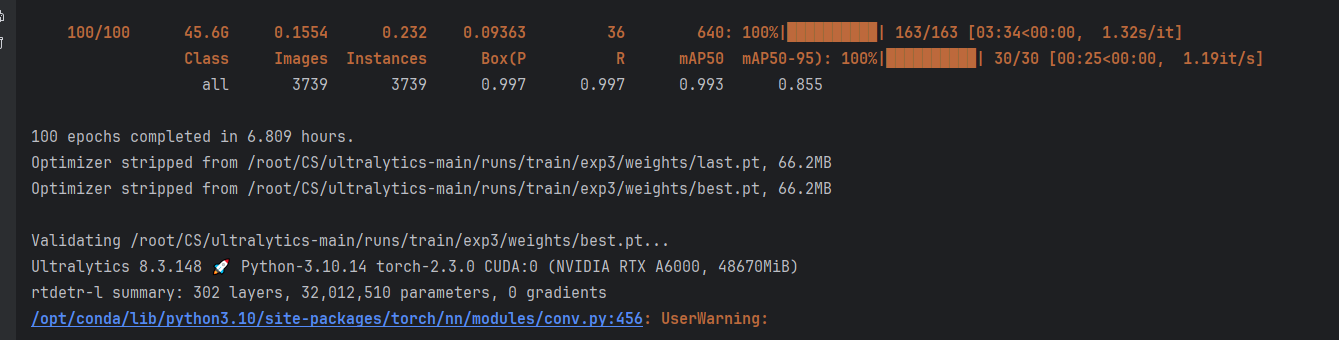
6.总结与讨论
虽然RT-DETR比DETR精度更高,FPS更高,但是参数量依旧很大,普通显卡不够训练。未来考虑轻量化改进以及图像压缩等操作。
