ros2-moveit2 配置与执行自定义urdf的报错处理
系统:ros2 humble moveit2
Could not find a package configuration file provided by “gazebo_ros”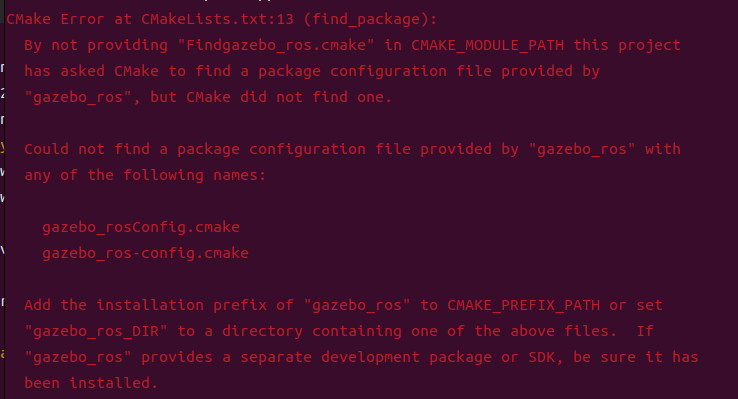
执行:
sudo apt install ros-humble-gazebo-ros-pkgs
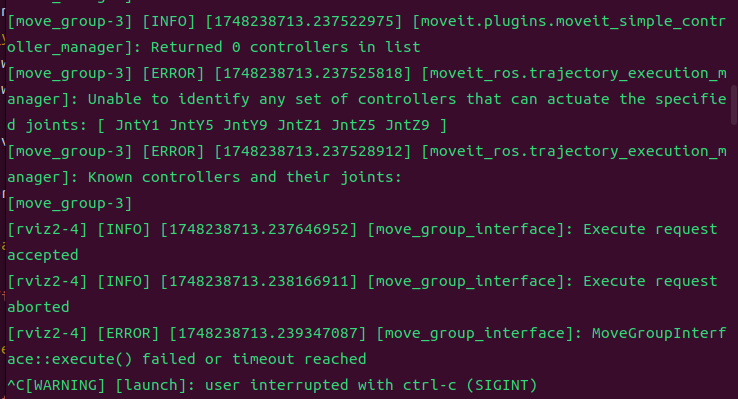
执行ros2 launch robomoveitconfig demo.launch.py 规划成功,但是无法执行
配置完成moveit2 setup assistant,运行
ros2 launch robomoveitconfig demo.launch.py
打印信息为:
[move_group-3] [ERROR] [1748241384.015931188] [moveit_ros.trajectory_execution_manager]: Unable to identify any set of controllers that can actuate the specified joints: [ JntY1 JntY5 JntY9 JntZ1 JntZ5 JntZ9 ]
[move_group-3] [ERROR] [1748241384.015934336] [moveit_ros.trajectory_execution_manager]: Known controllers and their joints:
[move_group-3] controller ‘robolinkage_controller’ controls joints:
[move_group-3]
[move_group-3] [ERROR] [1748241384.015938065] [moveit_ros.plan_execution]: Apparently trajectory initialization failed
[move_group-3] [INFO] [1748241384.015975077] [moveit_move_group_default_capabilities.move_action_capability]: Solution found but controller failed during execution
[rviz2-4] [INFO] [1748241384.016595506] [move_group_interface]: Plan and Execute request aborted
[rviz2-4] [ERROR] [1748241384.017193690] [move_group_interface]: MoveGroupInterface::move() failed or timeout reached
这是urdf没有配置关节驱动信息,即电机与减速器,在urdf文件里补充类似如下内容:
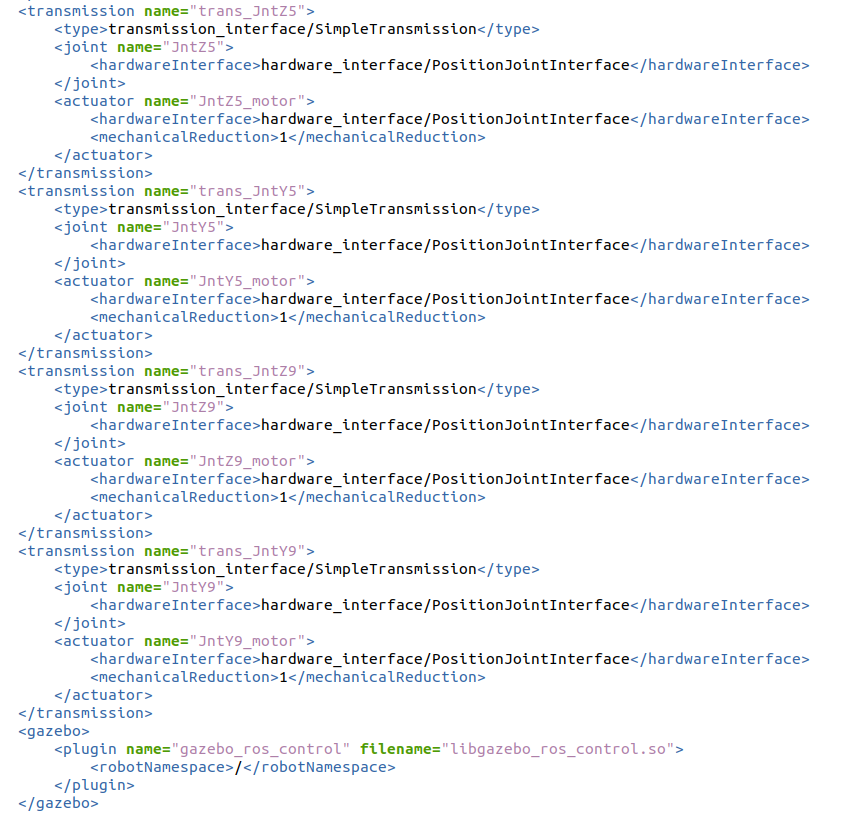
然后再次运行
sudo apt install ros-humble-gazebo-ros-pkgs
即可实现规划与执行