基于 PARE-YOLO 的多尺度注意力融合小目标检测模型
目录
一、背景:无人机小目标检测的四大挑战
二、模型架构:三阶段创新设计
2.1 Backbone创新:C2f-PPA模块
2.2 Neck创新:动态序列特征融合
2.3 Head创新:Transformer增强检测头
三、损失函数创新:EMA-GIoU
四、实验结果:全面领先的检测性能
4.1 VisDrone2019数据集表现
4.2 HIT-UAV红外数据集验证
五、代码实现与部署
5.1 环境配置
5.2 训练指令
5.3 关键超参数
六、未来方向与讨论
一、背景:无人机小目标检测的四大挑战
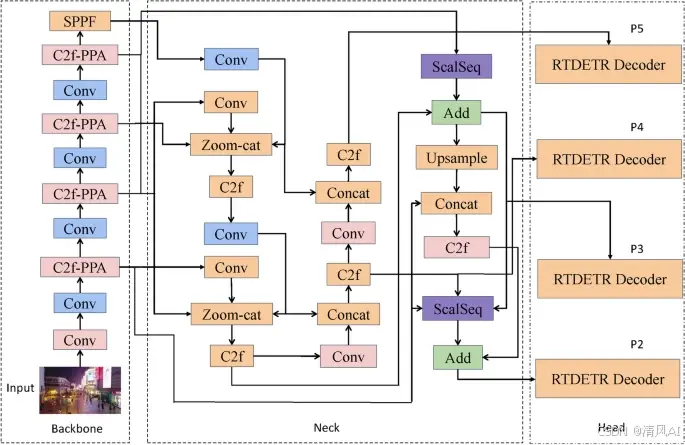
PARE-YOLO 模型的网络架构
在无人机航拍场景中,目标检测面临着"四小一多"的独特挑战:
- 像素占比小:目标在图像中通常小于32×32像素
- 特征