1.1 自动控制的一般概念
引言
本文针对考研/期末复习,梳理《自动控制原理》第一章核心考点,包含经典与现代控制理论对比、闭环控制系统组成、系统性能要求三大模块,助你快速掌握核心框架。
考点一:经典控制理论 VS 现代控制理论
通过对比表格快速掌握两大理论体系的核心差异:
| 对比维度 | 经典控制理论 | 现代控制理论 |
|---|---|---|
| 研究对象 | 单输入单输出系统(SISO) | 多输入多输出系统(MIMO) |
| 数学模型 | 高阶微分方程 | 一阶微分方程组(状态空间方程) |
| 研究方法 | 传递函数法(外部描述) | 状态空间法(内部描述) |
| 核心工具 | 拉普拉斯变换 | 线性代数、矩阵理论 |
| 分析方法 | 频域法(频率响应、根轨迹) | 时域法(可控性、可观测性) |
| 设计方法 | PID控制、校正网络 | 状态反馈、输出反馈 |
| 应用特点 | 物理意义直观,实现简单 | 易于实现最优控制、实时控制 |
Tips:
- 经典控制理论以传递函数为核心,关注系统输入输出关系;
- 现代控制理论通过状态变量描述系统内部特性,更适合复杂系统分析。
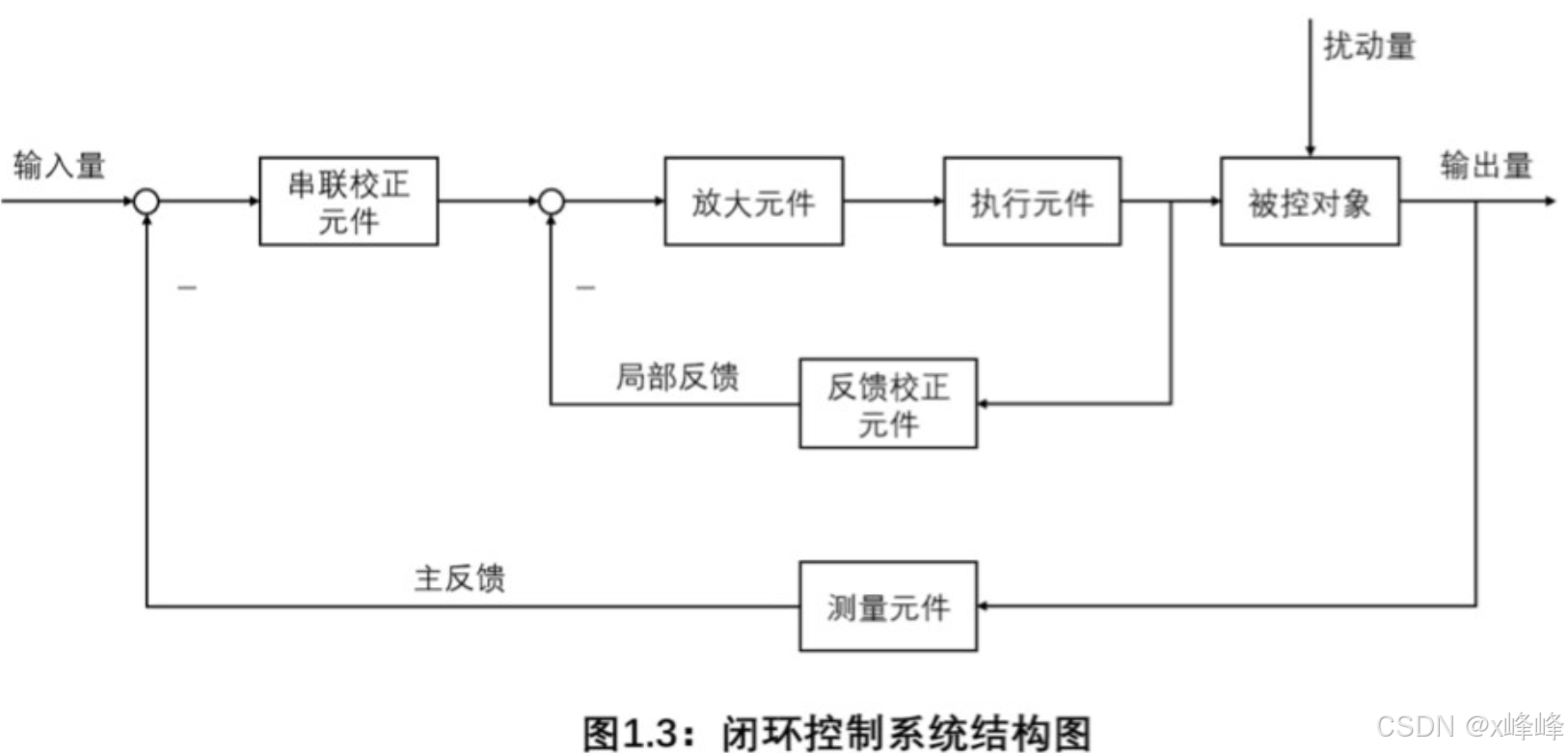
考点二:闭环控制系统组成结构
闭环控制系统结构图(见图1.3)包含以下核心元件:
- 输入量(给定值):系统的目标信号
- 比较器(误差检测):计算输入与反馈信号的偏差
- 控制器:根据误差生成控制信号(如PID控制器)
- 执行机构:将控制信号转化为物理动作(如电机、阀门)
- 被控对象:接受控制作用的物理系统
- 测量反馈元件:检测输出量并反馈至输入端(如传感器)
- 校正元件:串联或反馈环节,用于改善系统性能
闭环控制特点:
- 具有负反馈机制,抗干扰能力强
- 通过误差调节实现精准控制
考点三:自动控制系统三大性能要求
系统性能的评判标准围绕以下三个核心指标展开:
1. 稳定性(首要条件)
- 定义:系统受扰动后能恢复平衡状态的能力
- 判断依据:极点分布(左半复平面稳定)
2. 快速性(动态性能)
- 指标:调节时间( t s t_s ts)、上升时间( t r t_r tr)、超调量( σ % \sigma\% σ%)
- 优化方向:减小震荡,缩短响应时间
3. 准确性(稳态性能)
- 指标:稳态误差( e s s e_{ss} ess)
- 影响因素:系统型别、开环增益
关键结论:
- 稳定性是系统正常工作的前提;
- 快速性和准确性需在稳定基础上进行优化,二者存在矛盾需折中处理。
总结梳理
第一章重点围绕控制理论框架、系统结构原理和性能指标体系展开。建议结合典型例题(如闭环结构图绘制、稳定性判断)加深理解,为后续章节学习奠定基础。