1.2 Box以及 InsideBox的使用
本文介绍常用的两个指令:Box 以及InsideBox:
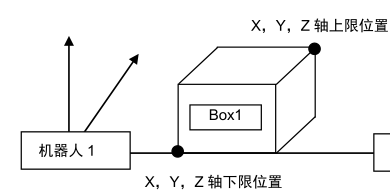
1. Box:用于设置检测区域
2. InsideBox:用于检测是否进入了指定的检测区域
3. 对于绕Z轴进行旋转的区域,如何使用Box来定义?可以在local坐标系中设置Box
比较常见的用法时,回原点之前,判断机器人在什么区域,区域不同,(若需要避开障碍)则返回原点所需要走的路径不同
一、Box:用于设置检测区域
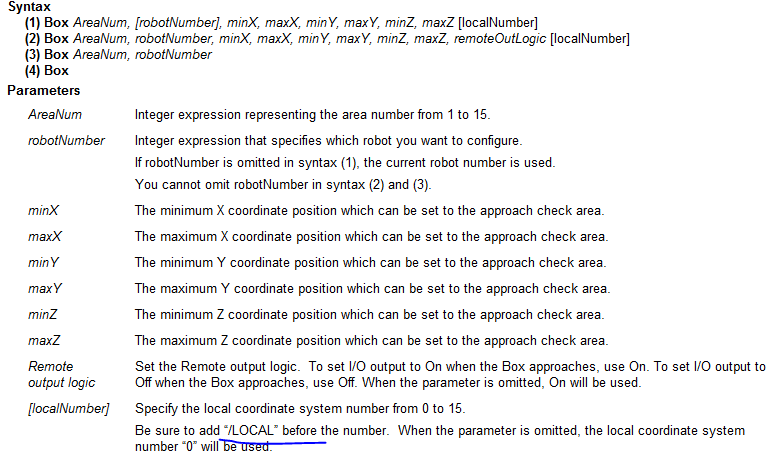
语法如下(如果是世界坐标系下定义box,其中LocalNumber可以省略,):
Box AreaNum, robotNumber, minX, maxX, minY, maxY, minZ, maxZ, remoteOutLogic [localNumber]
Box 区域编号 [, 机器人编号], X-, X+,Y-, Y+, Z-, Z+,远程逻辑输出 /Local 用户坐标系编号
Box 1, 1, 100, 200, 0, 100, 0, 100,on
表示机器人1,区域1设置: