电动车仪表上的数字怎么来的,想知道吗?
——从-235A/960kHz交流电到屏幕数字的数学与物理全拆解
作者:硬核科普君 | 目标读者:新能源汽车研发测试工程师
引言:仪表上的数字是“变魔术”吗?
当你踩下电动车油门时,仪表盘上的电流值瞬间从-235A跳变到+235A,背后是一场精密的数据战争。
本文将用数学公式+物理模型,揭示这场“魔术”背后的真实物理世界。
第1步:电流如何被“看见”?——互感器的物理边界
1.1 互感器的基本方程
交流电流穿过Rogowski线圈(一种空心互感器)时,输出电压为:
其中
为互感系数,N 为线圈匝数,A 为截面积,( r )为线圈半径。
1.2 带宽限制的数学证明
互感器的频率响应函数为:
其中( R )为积分电阻,( C )为寄生电容。
- 3dB带宽:
示例:当( R=100Ω ), ( C=10pF )时,( f_3dB ≈ 159MHz ),看似足够覆盖960kHz。但实际受限于:
- 趋肤效应:高频下导线电阻增加,

(f单位GHz)
- 介质损耗:
导致信号衰减
1.3 误差量化计算
对235A@960kHz信号:
但若带宽不足导致幅度下降5%:直接引入5%误差!
第2步:从模拟到数字——ADC的量子化革命
2.1 采样定理的暴力破解
对960kHz信号,传统Nyquist要求采样率≥1.92MSPS。但实际使用Σ-Δ ADC:
- 过采样率( OSR = 256 )
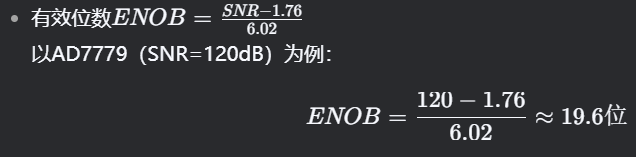
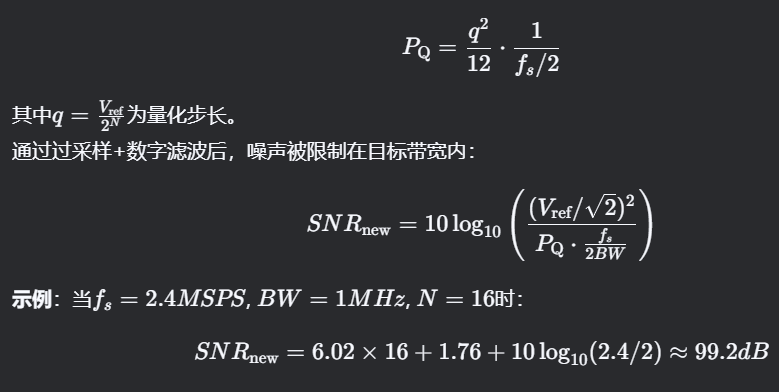
2.2 量化噪声的数学封印
量化噪声功率谱密度:
第3步:数字世界的战争——算法补偿的黑暗艺术
3.1 频率响应失真的逆运算

3.2 温度漂移的末日审判
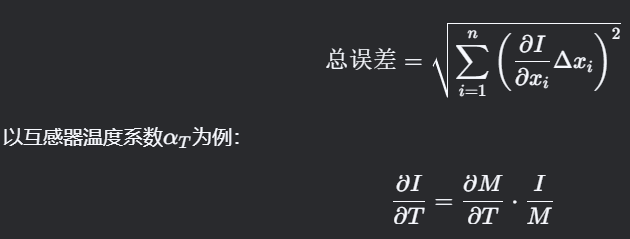
建立误差模型:

通过最小二乘法拟合系数( a,b,c ),实时补偿。
第4步:穿越CAN总线的生死时速
4.1 数据封装的时空博弈
1ms周期发送12位电流值(占2字节),在500kbps CAN总线中:
-
单帧传输时间:

-
理论最大更新率:( 1/0.00088 ≈ 1136Hz )
4.2 抖动误差的数学约束
若网络延迟抖动\Delta t,引起的电流变化率误差:
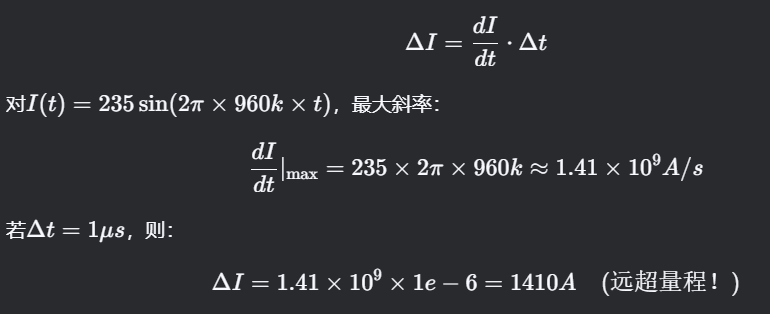
因此必须采用时间戳补偿。
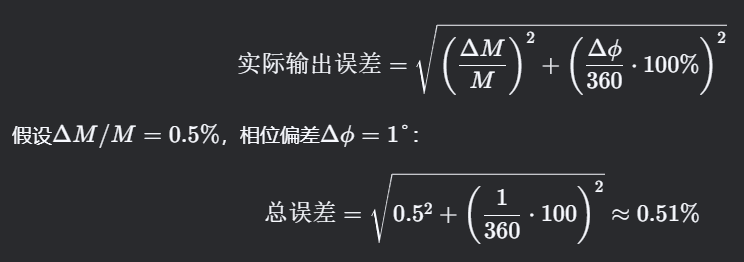
终极精度:误差的链式歼灭
总误差合成公式
实测案例:某800V平台数据
| 误差源 | 贡献值 | 优化后值 |
|---|---|---|
| 互感器非线性 | 0.8% | 0.2% |
| 温度漂移(-40~125℃) | 2.1% | 0.3% |
| ADC量化噪声 | 0.01% | 0.005% |
| CAN传输抖动 | 1.2% | 0.1% |
| 总误差(RMS) | 2.5% | 0.38% |
结语:仪表数字背后的宇宙
那个跳动的电流值,是电磁学、信号处理、热力学、网络通信等多物理场博弈的残影。每一个数字背后,都有一群工程师在与误差的战争中捍卫着小数点后的尊严。
“我们测量的不是电流,而是人类对抗混沌的意志。”
下期预告:《电池SOC 99%到0%背后的数学暴政——你敢相信你的续航里程吗?》
版权声明:公式可转载,但请注明出自《电动车仪表上的数字怎么来的,想知道吗》。