当前位置: 首页 > news >正文 从零开始学习PX4源码22(位置控制器---加速度部分理解) news 2025/8/23 17:08:57 目录 文章目录 目录摘要1.控制框图2.加速度控制3.PX4加速度转姿态角过程推导4.apm 加速度转姿态角过程推导 摘要 本节主要学习位置控制中加速度控制部分的理解,欢迎批评指正!!! 1.控制框图 在进行讲解之前,我们在来看下上面的整个过程流程,前面是位置控制,主要在惯性系下完成,后面是姿态控制,主要在机体系下完成。本节主要讲解速度控制到加速度控制的处理,如何得到无人机机体上的控制推力的过程。上面的控制过程可以用下面的方式表示: 这部分可以参看全权的教程有讲解: 查看全文 http://www.xdnf.cn/news/472861.html 相关文章: MyBatis XML配置和入门使用 论在中断中的标志变量使用volatile的重要性分析 基于EtherCAT与ABP vNext 构建高可用、高性能的工业自动化平台 双重差分模型学习笔记4(理论) ip命令详解 HPC软件使用之ANSYS Fluent Git-学习笔记(粗略版) SpringBoot中的Lombok库 Python模块化编程 俄罗斯方块算法 2025年长三角+山东省赛+ 认证杯二阶段资料助攻说明 简单网络交换、路由-华三MVRP Linux动态库热加载:动态库与主程序符号调用机制总结 6、登录功能后端开发 MobaXterm 25.2中文汉化版优秀的远程桌面管理软件 vue2 根据不同路由url设置不同的网页背景颜色 企业EcoVadis评估问卷实战指南:步骤拆解与避坑策略 centos7 基于yolov10的推理程序环境搭建 多语言支持的常见设计方案 C语言-指针函数和函数指针 【Linux】网络基础与socket编程基础 深入理解JavaScript中的闭包:原理、应用与常见问题 【stata】xtreg VS reghdfe 位运算题目:找到最接近目标值的函数值 新手入门系列-springboot项目初体验 C盘清理秘籍:快速提升系统性能 Python 调试扩展版本兼容问题解决纪实 在自动化脚本中使用找色实现精确定位目标区域 docker 学习记录 uniapp x
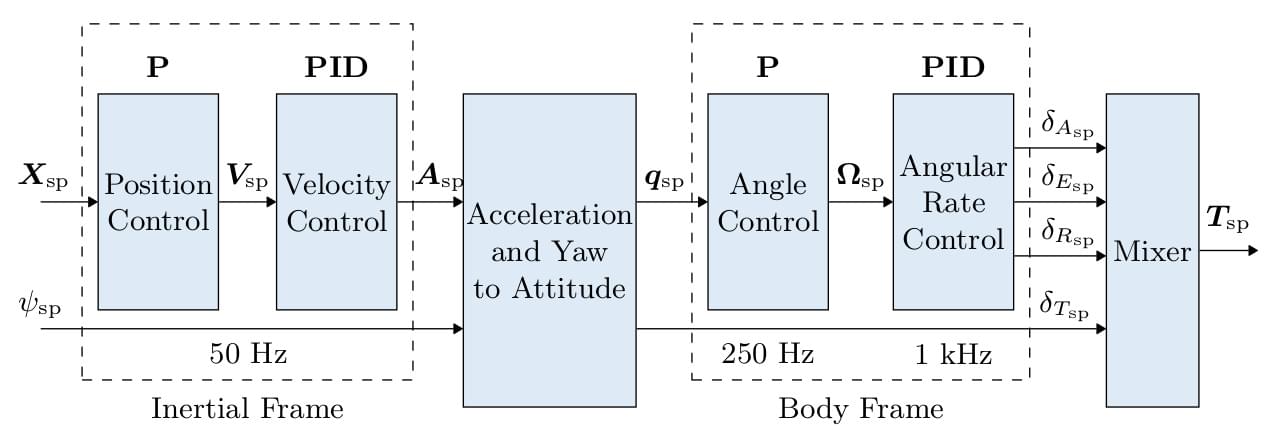
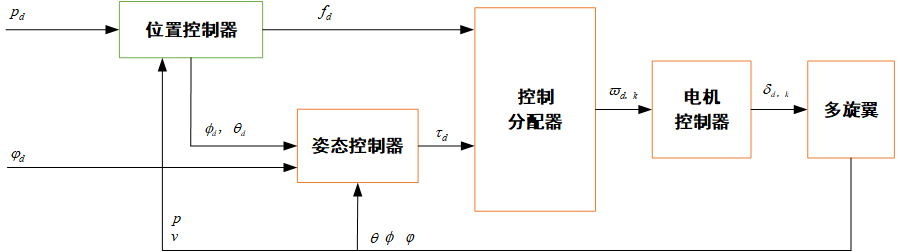
目录 文章目录 目录摘要1.控制框图2.加速度控制3.PX4加速度转姿态角过程推导4.apm 加速度转姿态角过程推导 摘要 本节主要学习位置控制中加速度控制部分的理解,欢迎批评指正!!! 1.控制框图 在进行讲解之前,我们在来看下上面的整个过程流程,前面是位置控制,主要在惯性系下完成,后面是姿态控制,主要在机体系下完成。本节主要讲解速度控制到加速度控制的处理,如何得到无人机机体上的控制推力的过程。上面的控制过程可以用下面的方式表示: 这部分可以参看全权的教程有讲解: