DG-3F三指机械灵巧手,3手指和12关节,单爪即可实现最高效率
该型号非常适合用单个夹爪抓取各种材质和形状的物体。
它无需工具更换器即可牢固抓取不同形状的物体,并且易于示教,可快速完成任务编程。它用途广泛,可广泛应用于以智能工厂、物流自动化为目标的制造业和服务业。
主要特点
1. 高效、精确的三指机构
三指设计,优化处理各种材质和形状的物体。适用于处理不规则和多种物体。
2. 自适应抓握能力
手指灵活适应物体形状,实现稳定抓握。即使在简单的作业环境下也能展现出高可靠性。
3.成本效益
简化的结构和部件降低了生产和维护成本。对于教育、科研和小型自动化系统而言,经济实用。
4.高耐用性
简化的设计确保在重复性工作环境中保持耐用性。在物理压力和工业环境下提供稳定的性能。


5. 多种握持模式
支持多种抓握模式,包括:捏握(用指尖抓握)、强力抓握(用整个手牢牢抓握)、
精确抓握(使用部分手指)根据物体的大小、形状和重量优化处理。
6. 易于安装和设置
简单的机械和电子结构使其易于集成到机器人系统中。用户友好的软件可实现快速、简单的操作设置。

7. 稳定的夹持压力
保持恒定的夹持压力,牢固夹持物体,不会滑落。可调节的压力可防止损坏精密物体。
8. 应用程序
工业用途:适用于物流任务、物体搬运和放置操作。
教育用途:用于学习机器人技术和自动化原理的实用设备。
科研用途:适用于研究低成本机器人控制和传感器反馈技术。
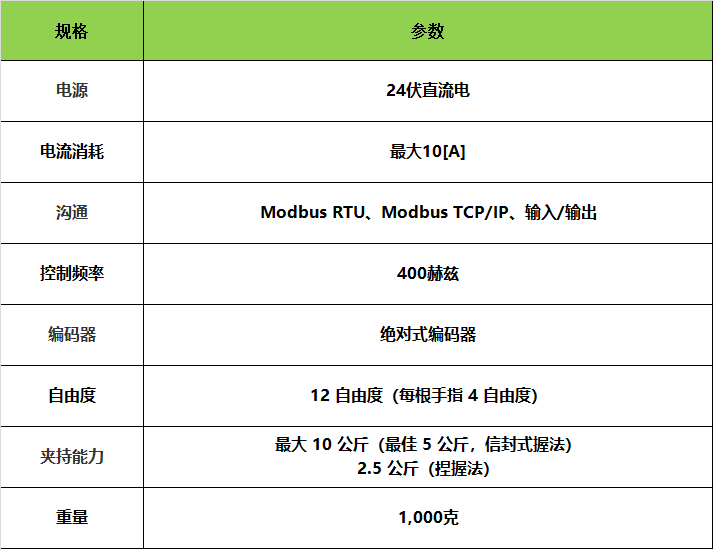
规格:
应用
多产品线拾放流程-针对混合任务环境进行了优化,提高了复杂环境中的效率和吞吐量。
组件组装-机器人简化了装配过程,提高了精度并降低了劳动力成本。
先进的拣选解决方案-包括箱内拣选和货架拣选,彻底改变库存管理和订单履行操作。