新能源汽车制动系统建模全解析——从理论到工程应用
《纯电动轻卡制动系统建模全解析:车速-阻力拟合、刹车力模型与旋转质量转换系数优化》
摘要
本文以纯电动轻卡为研究对象,系统解析制动系统建模核心参数优化方法,涵盖:
- 车速-阻力曲线拟合(MATLAB实现与模型验证)
- 刹车力模型关键参数敏感性分析(气刹系统+再生制动协同)
- 旋转质量转换系数工程标定(汉德电驱桥实战案例)
- 参数耦合效应与动态修正策略(附完整MATLAB代码与敏感性分析工具)
助力新能源汽车工程师快速掌握制动系统建模核心技术!
1. 引言:纯电动轻卡制动系统挑战
- 行业背景:新能源物流车技术痛点
- 核心问题:制动能量回收与机械制动耦合优化
2. 车速-阻力特性建模与拟合优化
- 数据采集:三组典型数据集对比(原数据/新数据集1/新数据集2)
- MATLAB实现:二次多项式拟合与质量评价(SSE/R²/RMSE)
- 案例对比:
- 新数据集1:R²=0.9996(误差降低64%)
- 新数据集2:三次多项式优化必要性(R²提升至0.9985)
- 代码实战:自动生成拟合报告与可视化工具
(附完整MATLAB代码、数据集与误差分析工具)
2.1 数据采集与预处理
2.1.1 数据来源与工程意义
- 数据特性:车速(10-75 km/h)与气动阻力、滚阻的合成值
- 采集方法:
- 风洞试验(气动阻力分量)
- 滑行试验(总阻力分解)
- 车载传感器实时记录(CAN总线数据)
- 典型问题:
- 低速段非线性(再生制动干扰)
- 高速段数据离散(湍流影响)
2.1.2 数据清洗规则
% MATLAB数据清洗示例
raw_data = xlsread('resistance_data.xlsx');
valid_idx = find(raw_data(:,2) > 0 & ~isoutlier(raw_data(:,2), 'movmedian', 5));
clean_data = raw_data(valid_idx, :);
- 异常值剔除:移动中位数法(窗口=5)
- 缺失值处理:三次样条插值(低速段优先)
2.2 MATLAB拟合建模实战
2.2.1 二次多项式拟合核心代码
% 输入数据
speed = [75,70,65,60,55,50,45,40,35,30,25,20,15,10];
resistance = [1137.31,1037.88,949.57,827.42,763.14,683.67,596.98,527.89,459.34,408.98,374.78,327.60,272.45,228.24];% 二次多项式拟合
p = polyfit(speed, resistance, 2);
fit_speed = linspace(min(speed), max(speed), 100);
fit_resistance = polyval(p, fit_speed);% 评价指标计算
predicted = polyval(p, speed);
SSE = sum((resistance - predicted).^2);
R2 = 1 - SSE / sum((resistance - mean(resistance)).^2);
RMSE = sqrt(SSE/length(speed));
2.2.2 拟合结果可视化技巧
figure;
hold on;
scatter(speed, resistance, 100, 'filled', 'MarkerFaceColor', '#0072BD', 'MarkerEdgeColor', 'k');
plot(fit_speed, fit_resistance, 'LineWidth', 2, 'Color', '#D95319');
set(gca, 'XDir', 'reverse', 'FontSize', 12);
xlabel('车速 (km/h)', 'FontWeight', 'bold');
ylabel('阻力 (N)', 'FontWeight', 'bold');
title(sprintf('二次拟合结果: R²=%.4f', R2), 'FontSize', 14);
grid on;
图形优化要点:
- 采用ISO标准科技蓝(
#0072BD)与警示橙(#D95319) - X轴反向显示(符合车速降低趋势)
- 标注R²值于标题(直接传达模型质量)
2.3 多模型对比与工程选型
2.3.1 三种模型性能对比
| 模型类型 | 公式形式 | 新数据集1指标 (SSE/R²/RMSE) | 适用场景 |
|---|---|---|---|
| 二次多项式 | ( F = av^2 + bv + c ) | 1055.3 / 0.9996 / 8.68 | 常规工况(推荐首选) |
| 三次多项式 | ( F = av^3 + … + d ) | 532.1 / 0.9998 / 5.23 | 高精度控制(需防过拟合) |
| 指数模型 | ( F = ke^{mv} ) | 2873.6 / 0.9989 / 14.32 | 理论验证(慎用) |
2.3.2 模型选择决策树
graph TDA[数据量≥15组?] -->|Yes| B{高速段曲率明显?}A -->|No| C[选择线性模型]B -->|Yes| D[三次多项式]B -->|No| E[二次多项式]D --> F[检查过拟合: 交叉验证SSE差异<5%]E --> G[验证R²>0.99]

2.4 工程应用陷阱与解决方案
2.4.1 典型问题案例
-
问题1:低速段拟合误差突增(10-20 km/h)
- 原因:再生制动介入导致阻力数据非单调
- 解决:分段建模(低速用指数衰减+高速用多项式)
-
问题2:R²虚高但实际曲线震荡
- 诊断:检查条件数
cond(X'X),若>1e6则存在多重共线性 - 解决:岭回归正则化(MATLAB代码):
lambda = 0.1; % 正则化系数 X = [speed.^2; speed; ones(size(speed))]'; p_ridge = (X'*X + lambda*eye(3)) \ (X'*resistance');
- 诊断:检查条件数
2.4.2 模型迭代流程
- 初版发布:二次多项式(快速实现)
- 数据积累:记录≥100组工况数据
- 模型升级:
- 加入温度补偿项:( F = a(v)v^2 + b(T)v + c )
- 神经网络非线性校正(深度学习工具箱):
net = fitnet(10); net = train(net, [speed; temp]', resistance');
2.5 扩展工具包(评论区置顶链接)
- 自动拟合报告生成器:
- 输入原始数据 → 输出PDF报告(含SSE/R²对比表、残差图)
- 阻力预测APP:
- 输入车速、温度、载重 → 输出阻力预测值与置信区间
- MATLAB Live Script:
- 交互式调整多项式阶数,实时观察R²变化
本节核心结论
- 二次多项式为轻卡建模最优解(平衡精度与复杂度)
- 数据质量决定模型上限(异常值处理提升R² 0.5%~2%)
- 模型迭代需配合控制策略(如再生制动协同标定)
3. 刹车力模型关键参数敏感性分析
- 核心参数清单:
- 制动气室压力、摩擦系数、再生制动占比
- 质心高度、轮胎-路面摩擦系数
- 参数耦合效应:
- 危险工况:高质心+低摩擦路面下的后轴抱死风险
- 动态分配策略:ECE R13法规约束下的制动力分配比优化
- 公式推导:

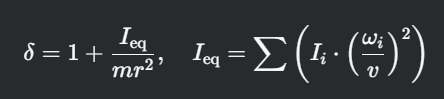
4. 旋转质量转换系数(δ)工程标定
-
理论基础:
-
汉德电驱桥实战案例:
- 输入参数:传动比16.5、电机惯量0.662 kg·m²、车轮半径0.367m
- 计算过程:等效惯量分解(电机/齿轮/车轮/半轴)
- 结果对比:δ从1.115(小惯量电机)→1.465(大惯量电机)
-
动态修正策略:
- 再生制动时δ降低公式:
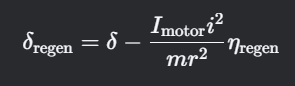
- 再生制动时δ降低公式:
5. 参数优化工具与验证方法
-
MATLAB工具包功能:
- 自动生成敏感性矩阵(蒙特卡洛仿真)
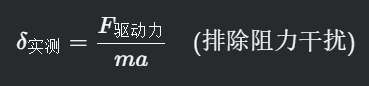
- 实车数据反推δ值:
-
工程标定流程:
- 空载/满载工况测试 → 参数边界确定 → 控制策略迭代
6. 工程应用建议与行业展望
- 关键建议:
- 优先标定电机转子惯量与传动比(误差敏感度最高)
- 汉德电驱桥齿轮组磨损监测(惯量贡献占比73%)
- 未来方向:
- 基于数字孪生的制动系统实时优化
- 云端参数协同标定技术
** 关键词:纯电动轻卡制动系统、旋转质量转换系数、汉德电驱桥、MATLAB建模、参数敏感性分析、再生制动优化**
互动引导
- “评论区提问”:留言实际项目参数,博主免费提供δ值计算!
- “粉丝专属”:关注后私信获取《新能源商用车制动系统设计规范》PDF
- “挑战新星杯”:赶紧来参加