STMCubeMX使用TB6612驱动编码轮并进行测速
硬件介绍
-
TB6612电机驱动模块功能与特性
电机方向控制
描述如何通过 TB6612 的 IN1 和 IN2 引脚控制电机的旋转方向。提供代码示例,展示如何通过 GPIO 控制电机的正反转。
速度控制与减速
解释如何通过调整 PWM 信号的占空比来控制电机的速度,并实现减速功能。提供代码示例,展示如何动态调整 PWM 占空比以实现速度控制。
-
编码减速电机的结构与工作原理
系统设计
-
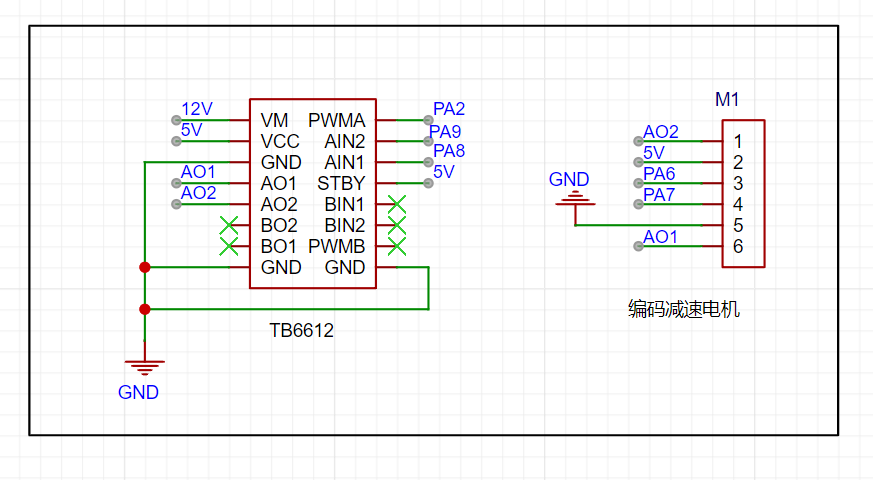
TB6612的连接
-
编码减速电机的连接
原理图如下
软件STM32CubeMX实现
-
初始化代码:GPIO
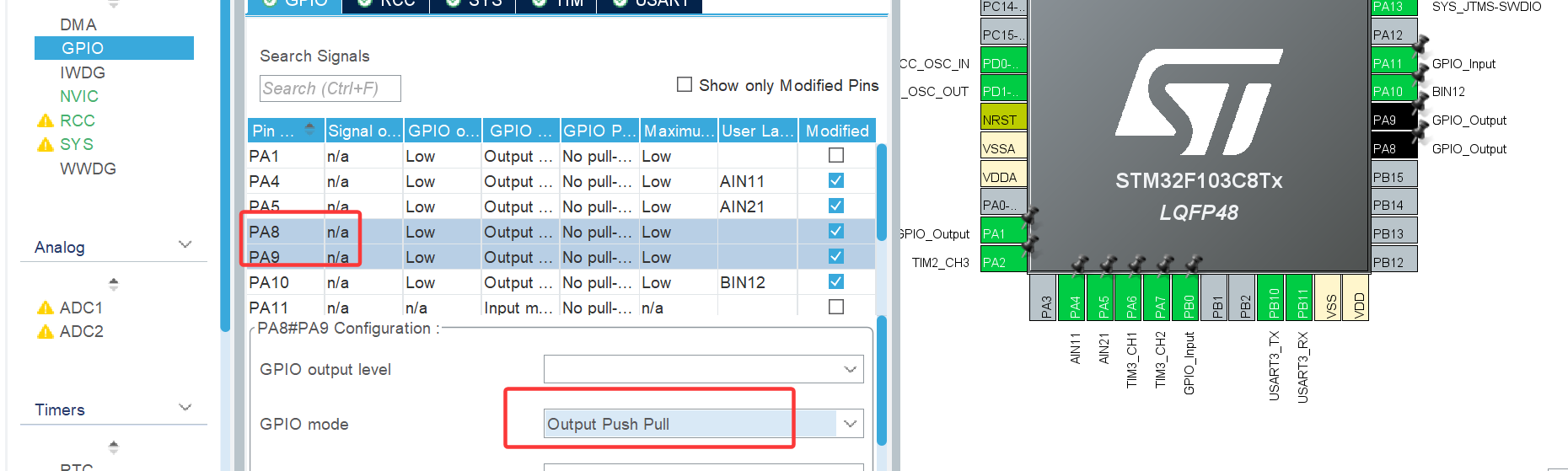
控制电机的旋转方向AIN1和AIN2,使用PA4和PA5,设置成推挽输出,其他参数默认
-
PWM输出:
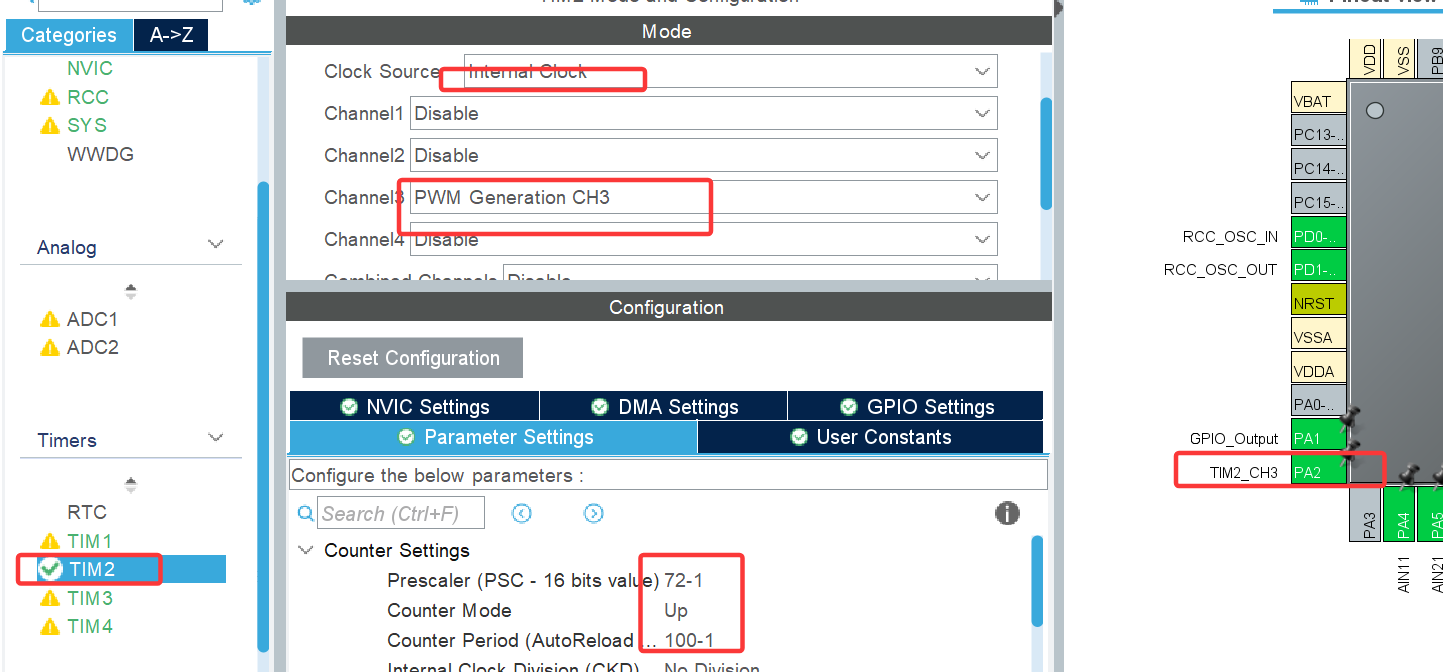
使用TIM2时钟的PWM通道1->PA0输出PWM,PWM的占空比调节范围0-100
占空比 = 1/(ARR+1)
开启定时器使能
-
编码器接口配置:
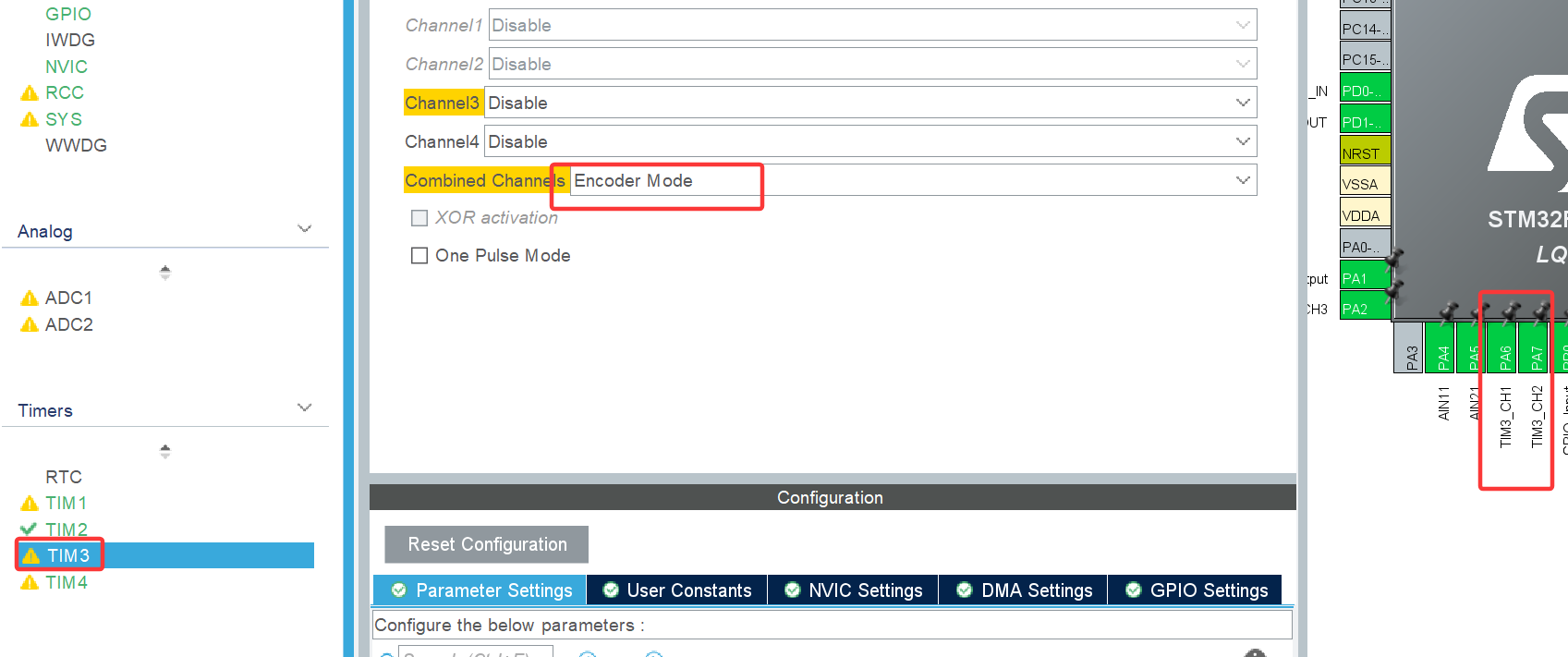
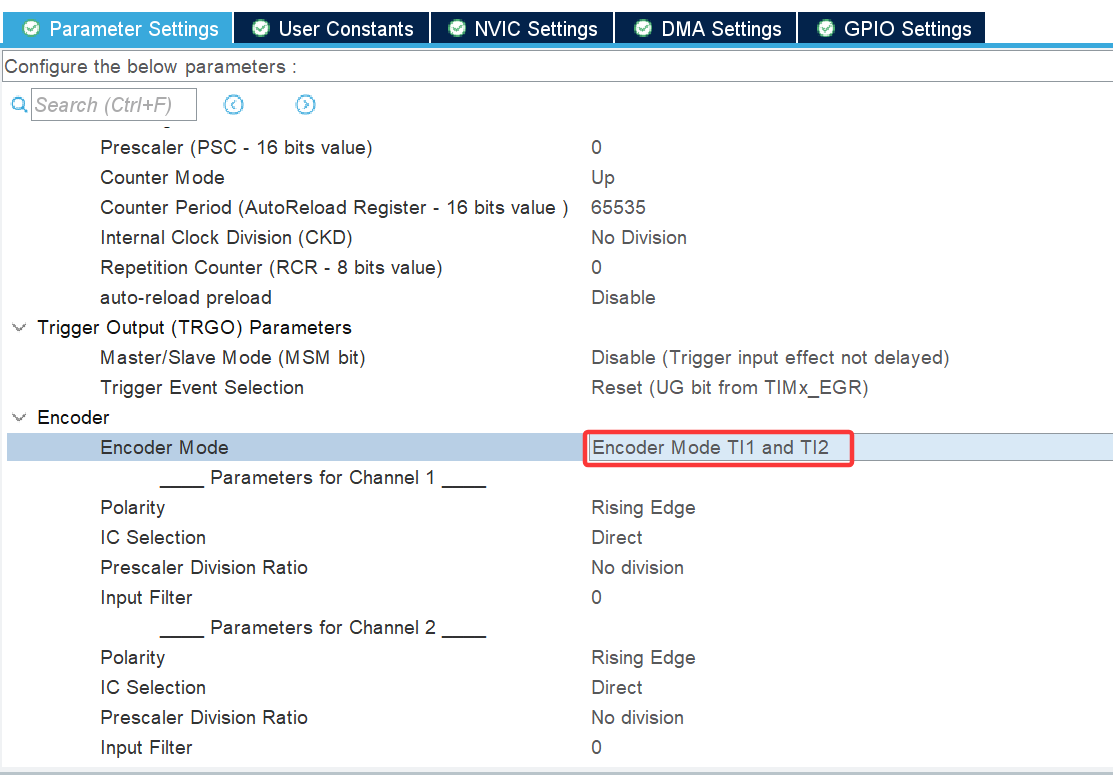
编码轮的测速中断使用TIM3,选择Encoder Mode使用TI1andTI2(四分频),其他默认
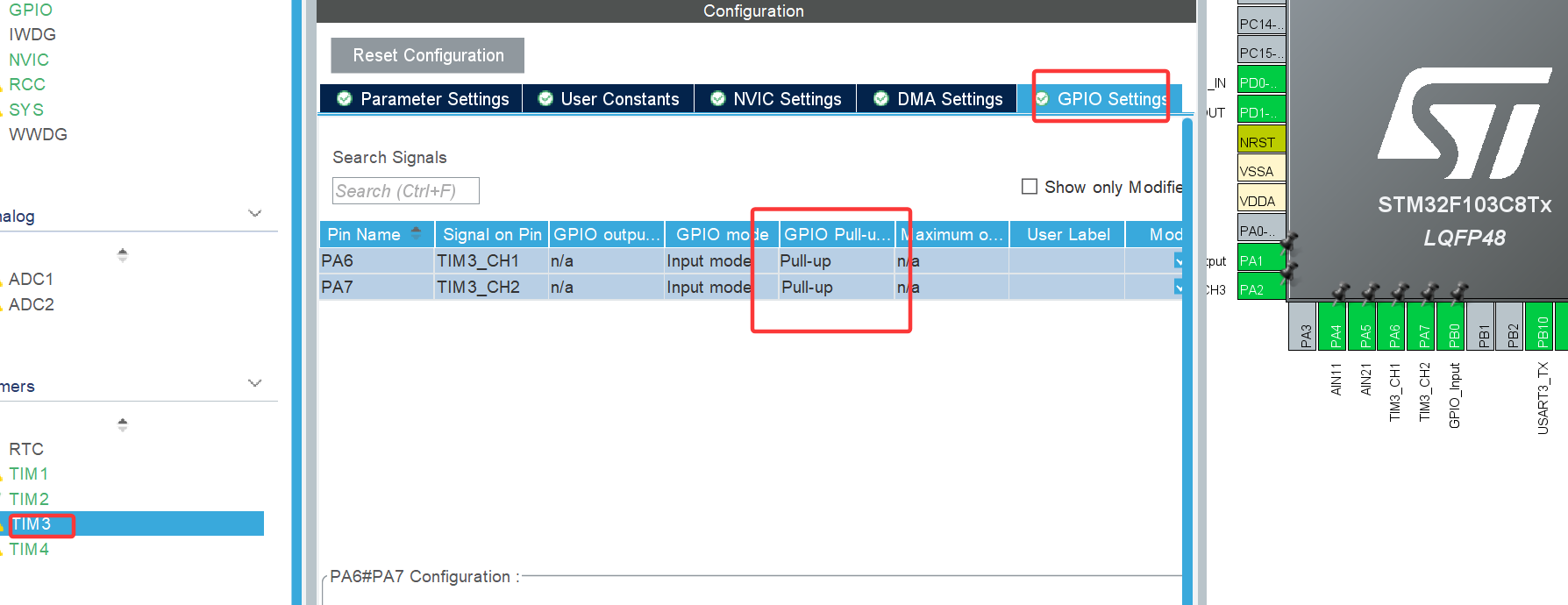
IO口使用PA6的TIM3_CH1和PA7的TIM3_CH2
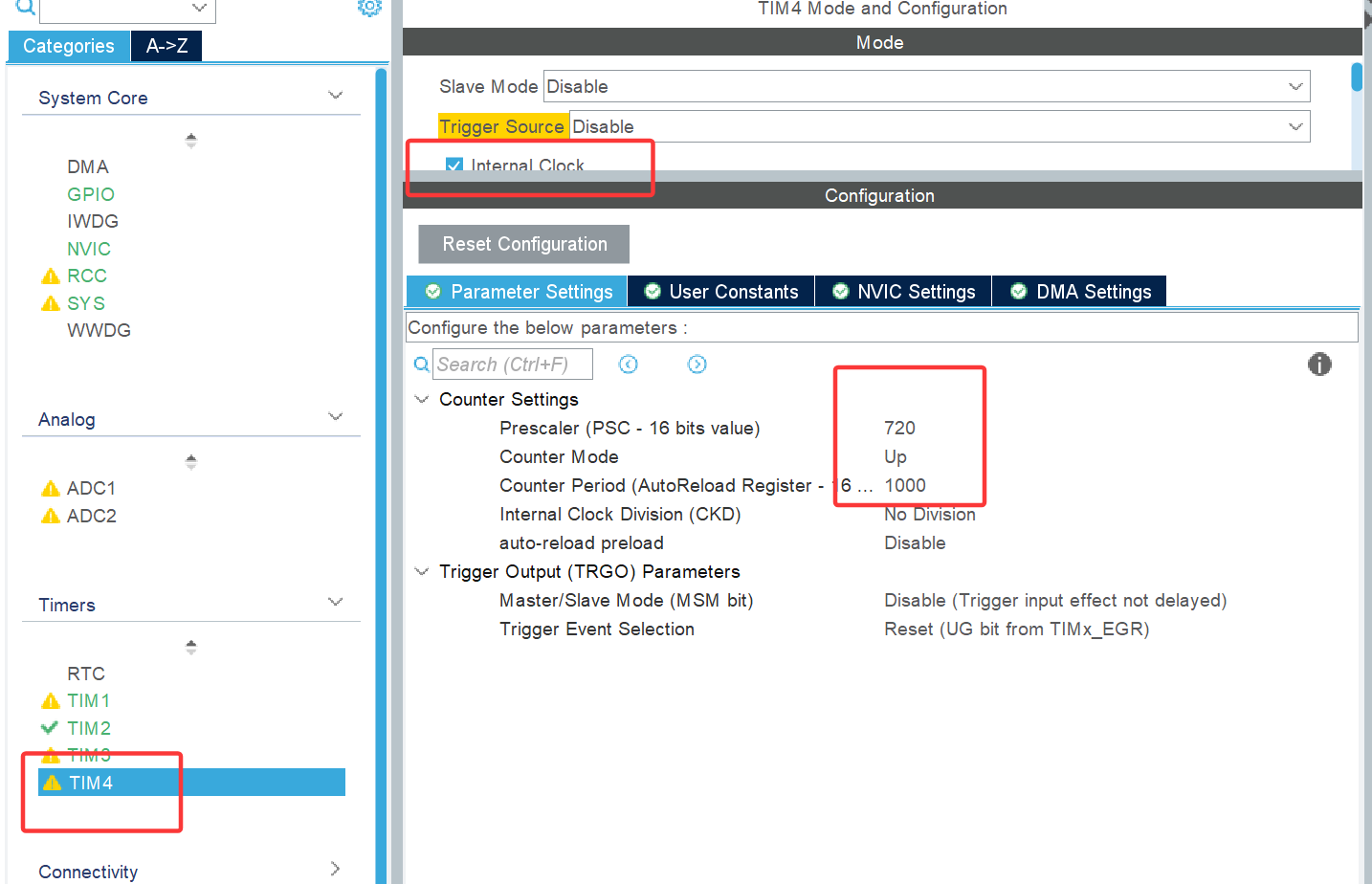
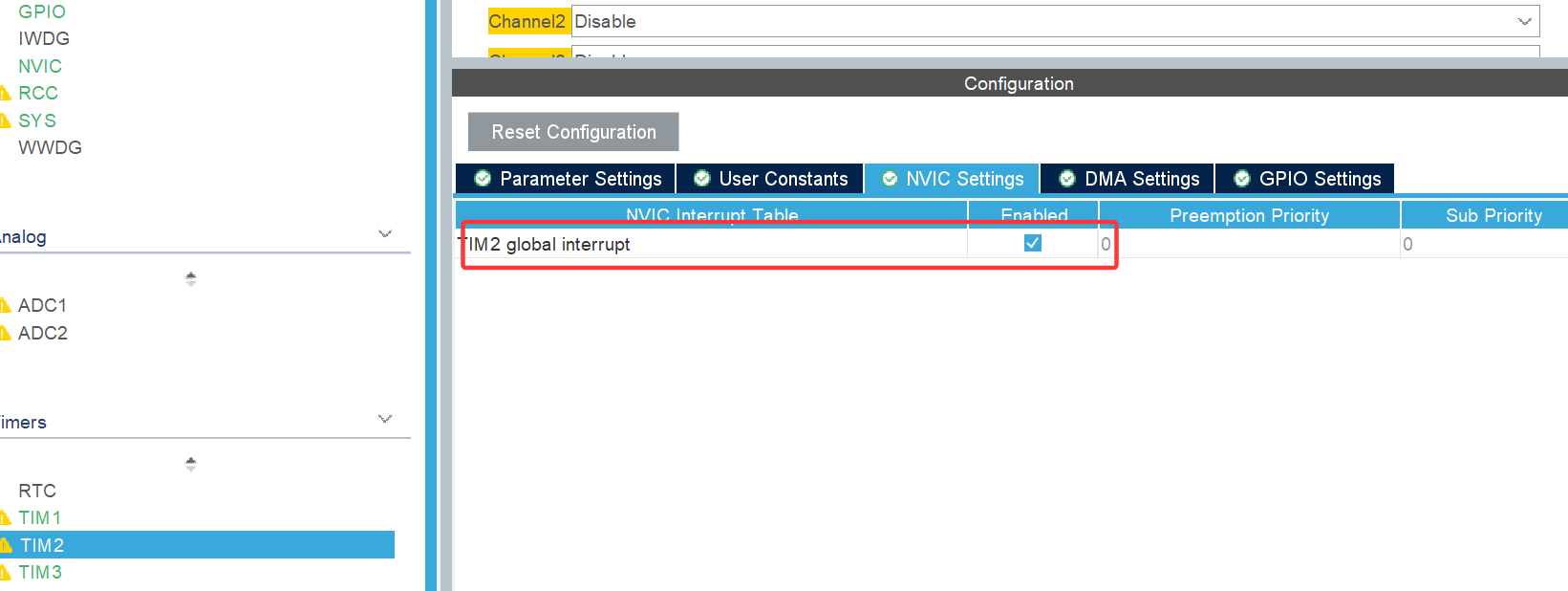
设置测速计算的定时器TIM4,定时时间10ms
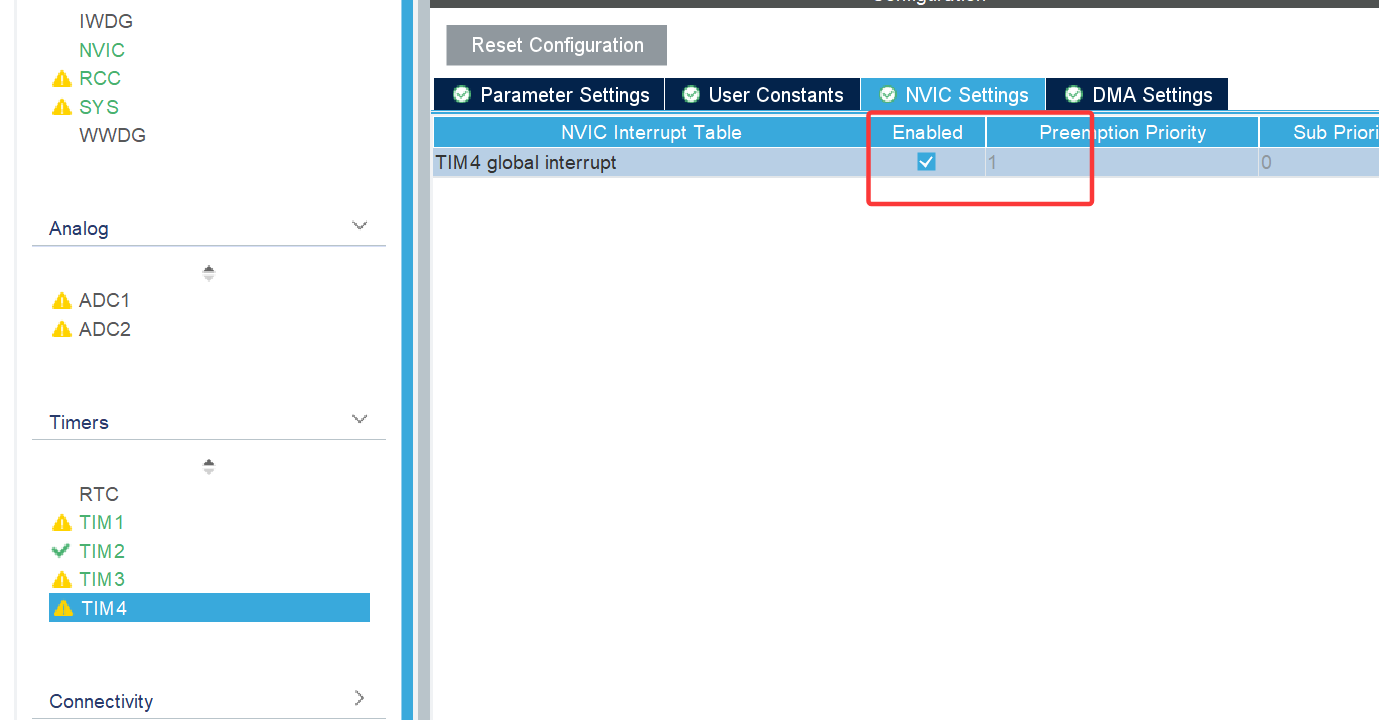
开启TIM4定时器使能
Keil软件的代码编写
fun.c函数
#include "fun.h"
#include "tim.h"/*** @description: 编码轮获取计数值函数* @return {*}*/
float speed = 0; // 当前速度
int16_t Encoder_Get(void) {int16_t cnt = (int16_t)__HAL_TIM_GET_COUNTER(&htim3);__HAL_TIM_SET_COUNTER(&htim3, 0);return cnt;
}/*** @description: * @param {TIM_HandleTypeDef} *htim* @return {*}*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{if(htim->Instance == Encoder1_TIM_time) // TIM4:10ms{int16_t count = Encoder_Get(); // 获取编码器计数值// 计算速度 (转/分钟)// 公式: (count / 11*4) / 10ms * 60000ms/minspeed = (float)count * 545.45f / 44.0f; //四分频11*4}
}/*** @description: 编码轮正反转函数* @param {int} direction 0正转 1反转 2停止* @param {uint16_t} speed 速度0-100* @return {*}*/
void Motor1_Set(int direction, uint16_t speed)
{switch (direction){case FORWARD:{Motor1_AIN1_G->ODR |= Motor1_AIN1_P; // AIN1=1Motor1_AIN1_G->ODR &= ~Motor1_AIN2_P; // AIN2=0}break;case BACKWARD:{Motor1_AIN1_G->ODR &= ~Motor1_AIN1_P; // AIN1=0Motor1_AIN2_G->ODR |= Motor1_AIN2_P; // AIN2=1}break;case BRAKE:{Motor1_AIN1_G->ODR &= ~Motor1_AIN1_P; // AIN1=0Motor1_AIN1_G->ODR &= ~Motor1_AIN2_P; // AIN2=0}break;}Motor1_PWM_CCR1 = speed;
}/*** @brief 控制小车运动* @param direction: 运动方向(CAR_FORWARD/CAR_BACKWARD/CAR_LEFT/CAR_RIGHT)* @param speed: 速度值(0~100)*/
void Car_Move(int direction, uint16_t speed)
{switch (direction){// 前进:所有电机正转case CAR_FORWARD:{Motor1_Set(0, speed); // 左前轮正转}break;// 后退:所有电机反转case CAR_BACKWARD:{Motor1_Set(1, speed); // 左前轮反转}break;// 左转:左侧反转,右侧正转(原地左旋)case CAR_LEFT:{Motor1_Set(1, speed); // 左前轮反转}break;// 右转:右侧反转,左侧正转(原地右旋)case CAR_RIGHT:{Motor1_Set(0, speed); // 左前轮正转}break;// 刹车:所有电机停止case CAR_BRAKE:{Motor1_Set(2, 0); // 左前轮刹车}break;}
}
fun.h函数
#ifndef __FUN_H
#define __FUN_H#include "main.h"/* 一个编码电机IO定义===========================================================*/
#define Motor1_AIN1_G GPIOA // 定义电机1的AIN1的GPIOx
#define Motor1_AIN1_P GPIO_PIN_8 // 定义电机1的AIN1的GPIO_PIN_x
#define Motor1_AIN2_G GPIOA // 定义电机1的AIN2的GPIOx
#define Motor1_AIN2_P GPIO_PIN_9 // 定义电机1的AIN2的GPIO_PIN_x
#define Motor1_PWM_CCR1 TIM2->CCR3 // 定义电机1的PWM输出为TIM2的TIM_CHANNEL_1
#define Encoder1_TIM_time TIM4 // 定义用于编码器的测速定时器
#define Encoder1_TIM_time_htim htim4 // 定义用于编码器的测速定时器句柄
#define Encoder1_TIM TIM3 // 定义编码器定时器通道TIMx-ch1与TIMx-ch2
#define Encoder1_TIM_htim htim3 // 定义编码器定时器句柄
/* Motor1_Set:电机转动的数值定义=============================================== */
#define FORWARD 0 // 正转
#define BACKWARD 1 // 反转
#define BRAKE 2 // 不转
/* Car_Move:小车移动的数值定义================================================= */
#define CAR_FORWARD 0 // 前进
#define CAR_BACKWARD 1 // 后退
#define CAR_LEFT 2 // 原地左转
#define CAR_RIGHT 3 // 原地右转
#define CAR_BRAKE 4 // 刹车
/* 调用小车的封装函数========================================================== */
void Motor1_Set(int direction, uint16_t speed);
void Car_Move(int direction, uint16_t speed);
int32_t Encoder_Get(void);#endif
main.c函数
在while循环前加初始化
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_3); //小车PWM输出 HAL_TIM_Base_Start_IT(&htim4); //计算速度定时器HAL_TIM_Encoder_Start(&htim3, TIM_CHANNEL_ALL); // 开启编码器定时器extern float speed; //全局声明速度while循环
while (1){char ta[15];sprintf(ta,"c= %.3lf ", speed);OLED_ShowString(2,2,ta);Motor1_Set(1, 30);}这样子就可以在OLED上显示速度了
调试与测试

实现