【调度算法】LaCAM快速多智能体路径搜索算法
原文链接:https://ojs.aaai.org/index.php/AAAI/article/view/26377
GitHub:https://kei18.github.io/lacam/
LaCAM is a search-based, sub-optimal, complete, quick, and scalable MAPF algorithm.
LaCAM 是一种基于搜索的、次优的、完整的、快速且可扩展的多智能体路径查找(MAPF)算法。
一句话总结:LaCAM 是一种面向快速规划的 MAPF 算法,通过将冲突作为“延迟处理+成本感知”的搜索变量,使得算法能在大规模、实时性场景下实现高效且鲁棒的多智能体路径规划。
出发点
多智能体路径规划(MAPF)问题(不会的看这篇:https://blog.csdn.net/weixin_44624036/article/details/147922672?spm=1011.2415.3001.5331)旨在为多个智能体在图上分配无碰撞路径,是多机器人协调的基础。在实际应用中,如自动化仓库中的车队操作,需要实时解决包含数千个智能体的MAPF问题。MAPF算法的设计需要在质量和速度之间进行权衡:从质量角度看,求解MAPF的最优解是NP-hard问题;从速度角度看,次优算法可以在牺牲解的质量的情况下快速解决大规模MAPF实例。因此,开发快速的次优算法具有实际价值。
定义
lazy constraints addition search for MAPF (LaCAM)
惰性约束添加搜索的多智能体路径规划(MAPF)算法【我自己翻译的】
先看一下什么是惰性约束(Lazy constraints)。惰性约束(lazy constraints) 指的是:并不一开始就加入到模型中求解器的全部约束条件,而是在求解过程中按需动态添加的一类约束。
也就是说,从命名上看,LaCAM算法求解MAPF问题的思路应该是,先不考虑智能体发冲突约束,随便生成一个初始解,对这个解进行基本的可行性验证,如果发现该初始解对应的路径规划方案存在冲突,则将该冲突添加到冲突约束里,更新初始解。
这种思路避免了在初始模型中加入大量潜在“无用”的约束,能够在大规模智能体调度问题上表现出较高的求解效率。
两级搜索策略
原文描述:
LaCAM is a two-level search. At the high-level, it explores a sequence of configurations; each search node corresponds to one configuration. For each high-level node, it also performs a low-level search that creates constraints. A constraint specifies which agent is where in the next configu ration. The low-level search proceeds lazily, creating a minimal successor each time the corresponding high-level node is invoked.
LaCAM 是一种双层次搜索算法。在高层次上,它探索一系列配置;每个搜索节点对应一个配置。对于每个高层次节点,它还执行一个低层次搜索,创建约束。约束指定哪个智能体在下一个配置中的位置。低层次搜索是惰性进行的,每次调用相应的高层次节点时都会创建一个最小后继节点。
一开始看半天没看明白,后来结合算法的实现细节,可算是拼凑出了个大概。即:
- 高层搜索:每个高层节点是一个全局配置 (v₁, v₂, …, vₙ),代表所有智能体的位置组合(在论文中是元组)。高层节点使用深度优先搜索(DFS)。
- 低层搜索:每个低层节点代表一个智能体的动作空间,即该智能体下一步能移动到的所有位置的集合。低层节点使用广度优先搜索(BFS)。
- 全局配置更新:低层搜索完成后,智能体的位置可能发生改变,因此需要更新全局配置信息,即更新高层节点。
那么问题来了,LaCAM为啥在高层搜索中采用深度优先搜索,而在低层搜索中采用广度优先搜索呢?
高层采用DFS的关键思想是,优先深入到可能是目标配置的路径上,然后再回溯修正冲突,是一种“先做后改”的策略。DFS能够快速找到一条完整的可行解路径(哪怕 sub-optimal),可用作初始解。此外,LaCAM 是 lazy constraints addition,初期不追求最优解,而是先找到一条解再逐步修正。
而低层节点就像“地基”,必须稳、全,所以要BFS保证不遗漏任何可行动作。BFS 可以在动作空间中穷尽所有可行动作,帮助生成所有可能的“邻接配置”。此外,BFS更适合处理带约束的动作图搜索问题(如避免冲突),可以更方便地判断是否存在一条不违反已有约束的路径。
搜索过程
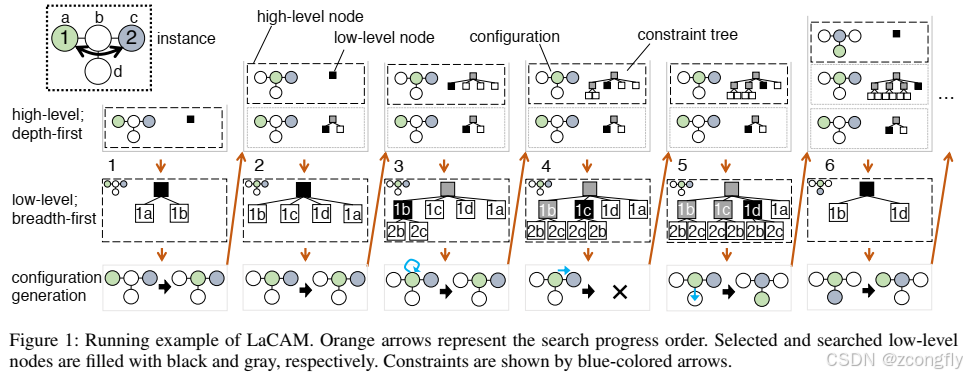
论文里通过一个简单的例子介绍了LaCAM算法的逐步搜索和扩展新状态的过程,下边是该过程的配图。
 鉴于论文里的一大串英文原文我实在是没看明白,对这张图的描述采用GPT老师的版本:
鉴于论文里的一大串英文原文我实在是没看明白,对这张图的描述采用GPT老师的版本:
- 每个高层节点代表一个配置(例如两个智能体的位置如 (a,c)、(b,c) 等);
- 每个低层搜索是针对其中某一个智能体,尝试移动它并检测会不会违反约束(例如碰撞);
- 如果低层搜索生成了新配置(新的高层状态),就将其加入到 Open 集合里,等待继续探索;
- 若生成的配置在之前已经出现过,或因为冲突无法生成新配置,那么就不再扩展高层节点。
这里注意两点可能会好理解一些:
- 论文举例的两个智能体的位置是元组 (a,c),这里的元组不代表XY坐标,而是对智能体位置的简单标记,即智能体1在标记为a的位置,智能体2在标记为b的位置。如果是三个智能体那就是(a,b,c)。当智能体位置发生改变时,比如高级节点由(a,c)→(a,d),意为智能体1位置不变,智能体2位置从c移动到d。
- 所谓“高级”、“低级”,不是说智能体或者位置节点啥的等级,而是指两种搜索方式关注的点不太一样。高级搜索关注智能体的整体状态,低级搜索关注智能体的局部移动。智能体的局部移动受到冲突的约束,同时会影响智能体的整体状态,使得高级节点发生更新。
即:高级节点存储所有智能体当前的配置状态,也就是每个智能体的当前位置。这个层次做的是“整体状态”的搜索。低级节点针对一个特定智能体,生成可能的移动方式(也就是 successor),并检查是否满足已有约束。
GPT老师给出了一个形象的类比:高层搜索——指挥官,低层搜索——士兵。
| 角色 | 类比作用 |
|---|---|
| 高层 | 指挥官,看的是整体局势,要知道每个智能体现在在哪 |
| 低层 | 士兵,具体去操作“怎么动”,一步一步试探路径,同时遵守高层给出的“规则(约束)” |
我自己对这个搜索过程的理解是:高层节点是全局配置,低层节点是每个智能体的运动空间,高层节点用深度优先搜索先随机选择一个智能体,对于这个选定的智能体用广度优先搜索探索其所有动作空间。如果高层节点用广度优先搜索的话,那应该是高层节点依次选择每个智能体,生成所有可能的新的全局配置。
算法终止条件
既然深度优先搜索和广度优先搜索都是全局搜索算法,那为什么LaCAM是次优的算法呢?这个算法的终止条件是什么?
为什么 LaCAM 是“次优(sub-optimal)”算法?
虽然深度优先搜索(DFS)和广度优先搜索(BFS)都是全局搜索算法,但 LaCAM 被称为“次优”是因为它不保证找到代价最小(即 Sum-of-Cost 最小)的解。这主要源于以下几点:
- LaCAM 使用了 Lazy Constraint Addition 的思想
- 它不在一开始就生成所有冲突约束(如 CBS 那样),而是遇到冲突才添加约束;
- 这相当于:先走一条“看起来通的路”,遇到障碍再修正,而不是一开始规划全局最优路径。
- 高层 DFS 优先找“可行解”而非“最优解”
- 高层使用 DFS 意味着它更偏向于快速找到第一个无冲突的解,不保证遍历所有可能配置;
- 也就是说,如果更优的解在“另一条分支”上,LaCAM 不会回溯去找。
- 没有使用最优性保障的启发式函数(如 A* or admissible heuristic)
- LaCAM 的搜索策略没有设计成一定要找到全局最优解;
- 相比之下,像 CBS-Optimal 或 A*-based MAPF 算法,通常会通过代价函数 + 启发式来严格保障最优性。
LaCAM 的终止条件是什么?
LaCAM 的搜索过程在找到一个满足所有约束的可行路径时终止,当搜索到一个高层节点,其包含的全局配置表示:
- 所有智能体都已到达各自的目标位置;
- 并且路径中没有任意时间步的冲突(即满足当前所有累积的约束);
此时,LaCAM 停止搜索,返回当前的解作为结果。注意,它不再继续搜索是否有代价更小的解。所以这个解是可行解,但不是最优解(因此是次优算法)。