不换设备秒通信,PROFINET转Ethercat网关混合生产线集成配置详解
在汽车制造中,连接Profinet控制的PLC(如西门子S7)与EtherCAT伺服驱动器(如倍福AX5000),实现运动控制同步。
在汽车制造的混合生产线集成中,实现西门子S7 PLC与倍福AX5000 EtherCAT伺服驱动器的精确同步控制是一个关键技术挑战。通过深入的网络协议适配和运动控制策略,可以有效提升生产线的集成度和动态性能,方案选择了PROFINET转ethercat协议网关-稳联技术WL-PN-ECATM,协议之间双向互转,非常方便。
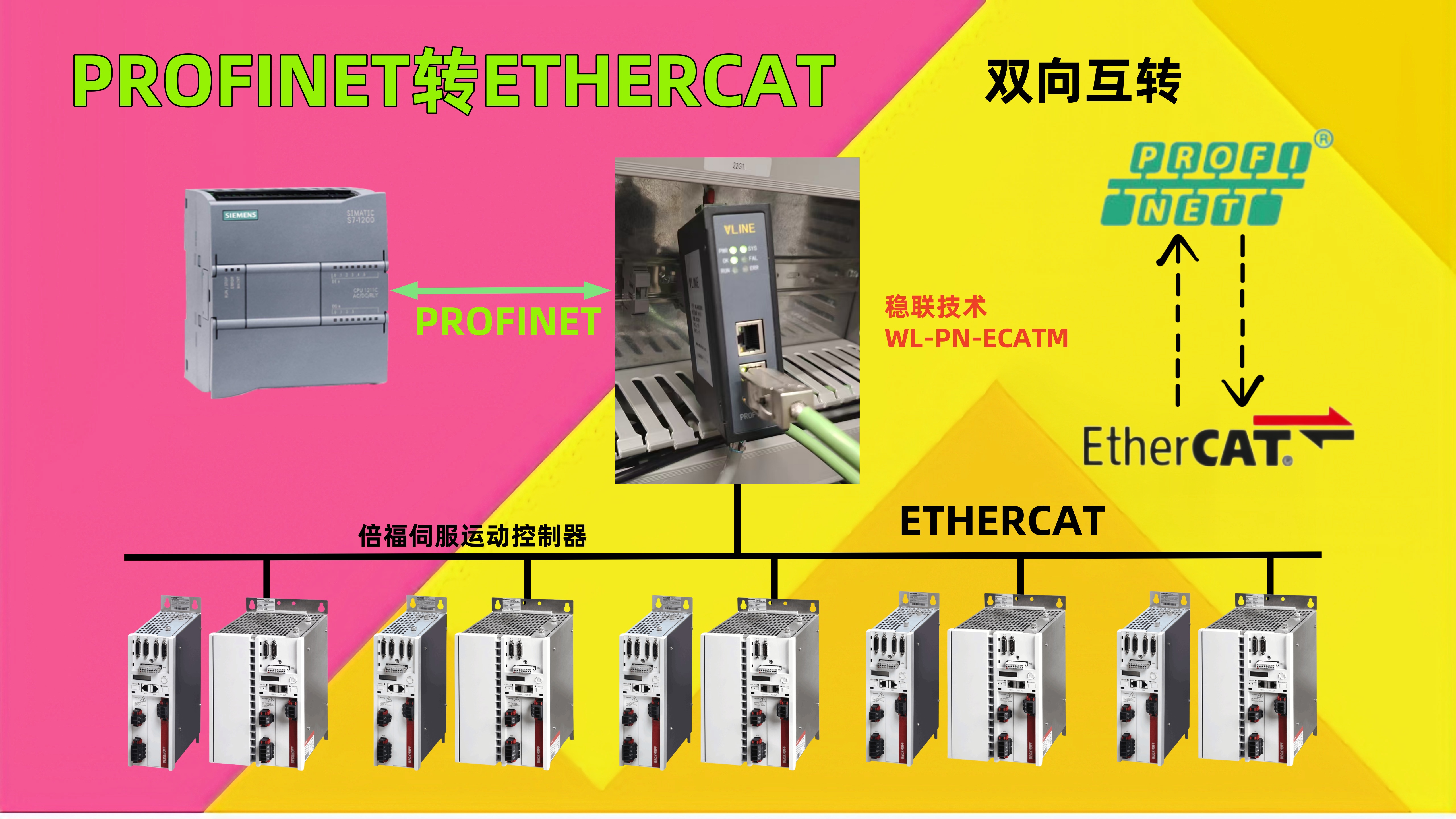
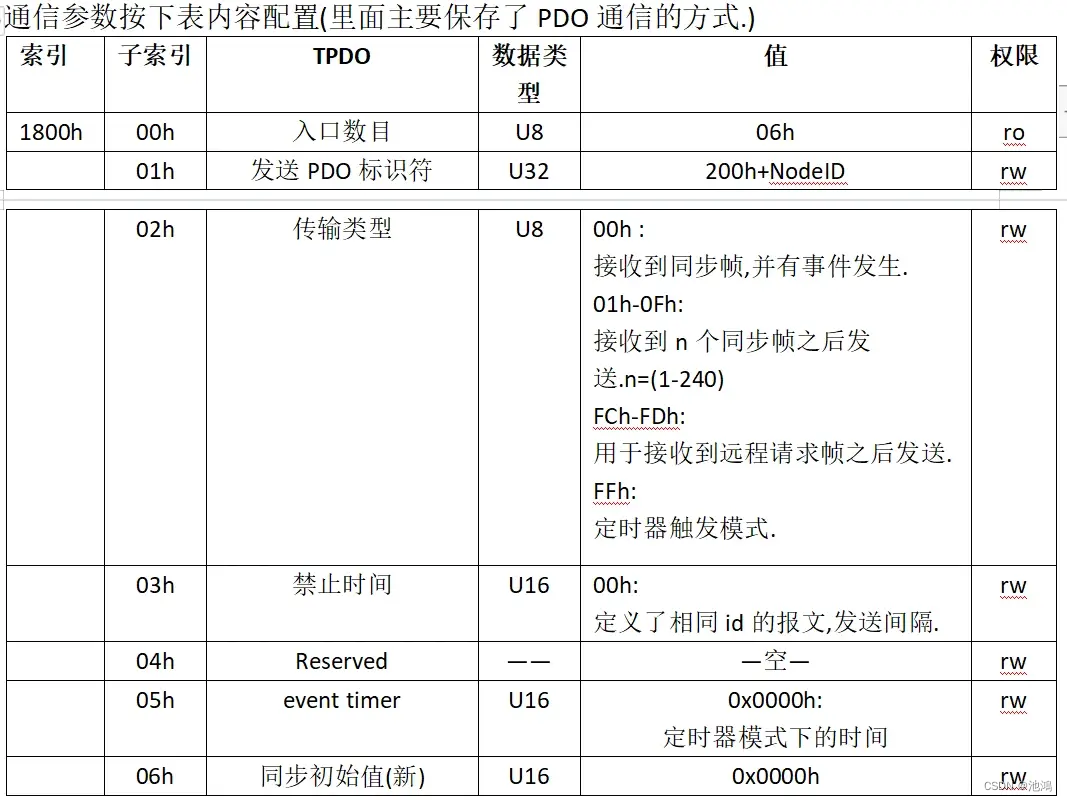
首先,需要建立Profinet与EtherCAT之间的通信桥接。可以采用工业网关稳联技术WL-PN-ECATM专用通信模块,实现不同总线协议的数据交换。在网络配置层面,确保PLC与伺服驱动器的通信参数一致,包括波特率、站点地址和同步周期等关键参数。
在运动控制同步方面,利用西门子S7 PLC的高精度时钟同步功能,通过周期性同步报文(Cyclic Synchronous Message)实现与AX5000驱动器的精确协调。可以设置共同的同步周期,通常在1-2ms范围内,确保电机运动的实时性和一致性。
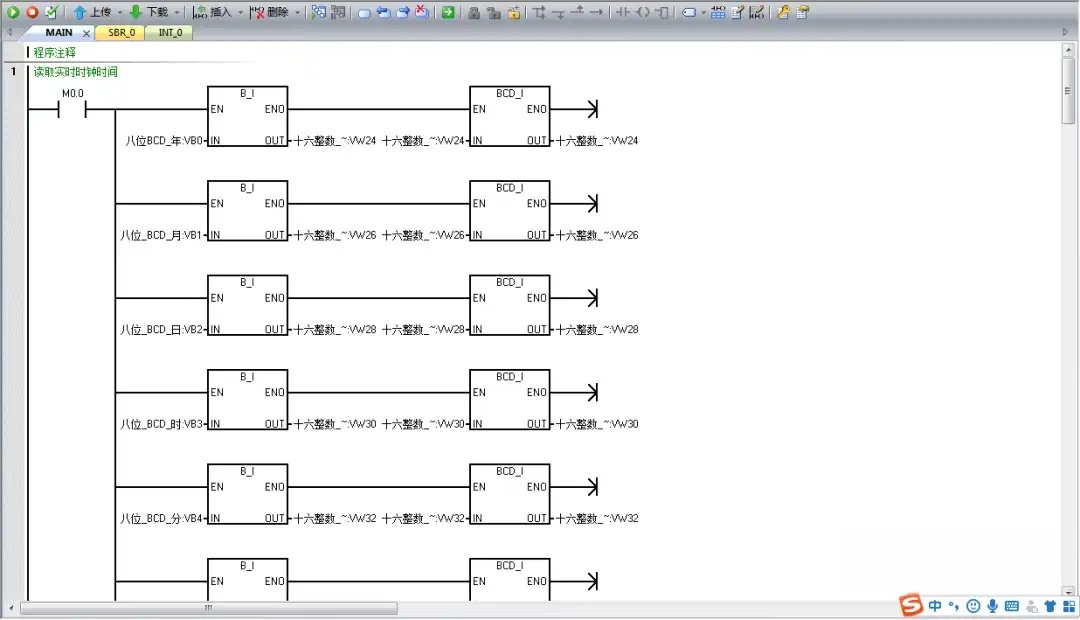
驱动器参数配置是成功集成的关键。需要精确设置伺服电机的位置、速度和加速度参数,并通过PLC的程序逻辑进行闭环控制。可以采用实时以太网的通信机制,传输位置反馈信号和控制指令。

在实际应用中,通过合理的PROFINET转ethercat协议网关选型和软件设计,可以实现生产线上多个伺服轴的协同运动。例如在汽车车身装配线上,多个机器人或输送线需要精确、同步地完成装配动作。
总之,混合生产线的控制系统集成不仅需要通信层面的技术突破,更要从系统架构和控制策略上进行全面优化,最终提升生产线的柔性、效率和可靠性。