ROS-关节轨迹(position、velocities/accelerations)绘图
1.通过终端输入以下命令获取各个关节的轨迹信息
rostopic echo /move_group/display_planned_path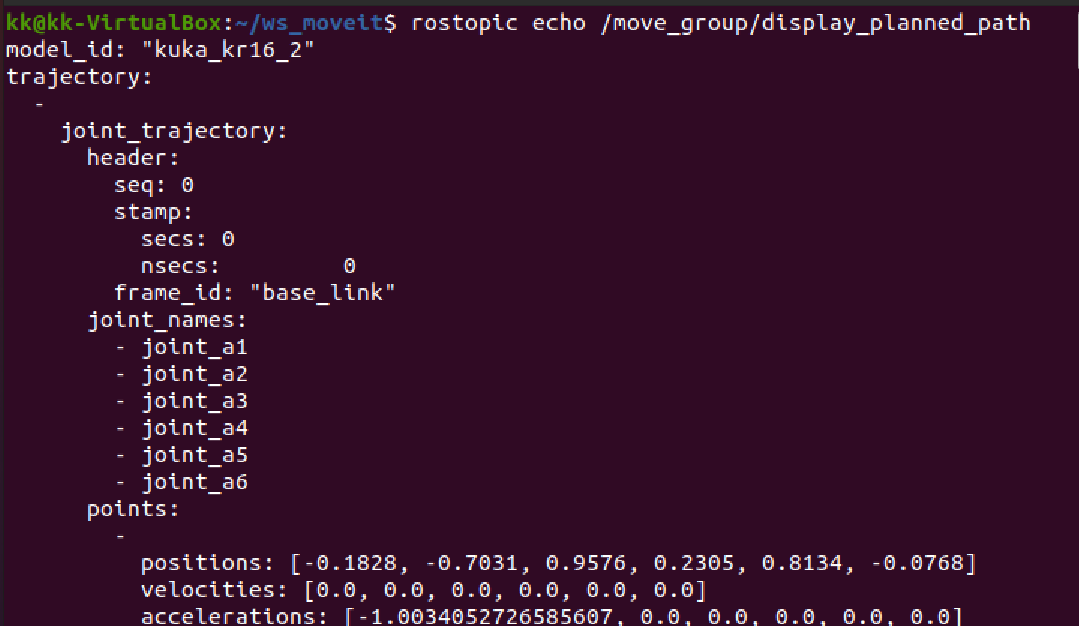
2.复制粘贴到deepseek上 整理成表格数据csv格式
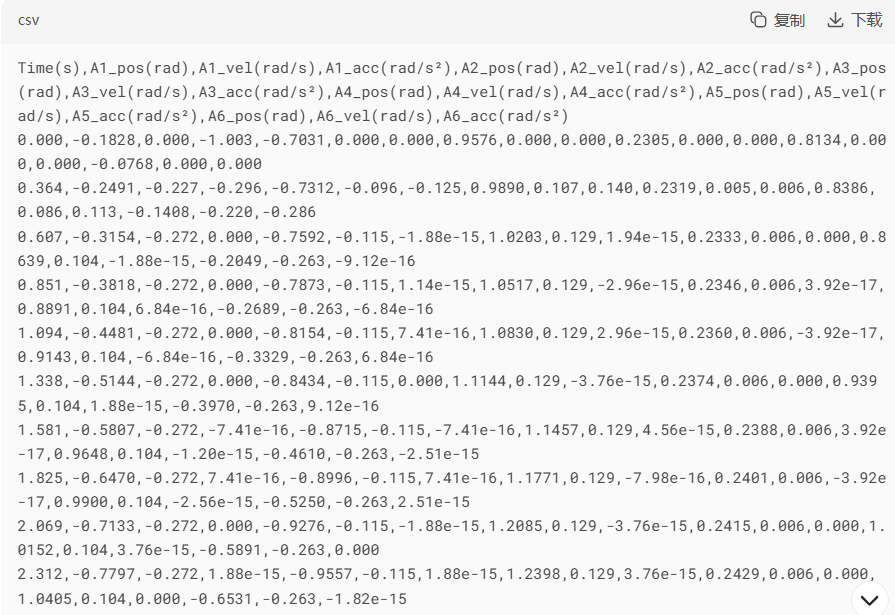
3.复制这些数据粘贴到记事本中,并另存为 kuka_trajectory.csv(确保扩展名为.csv)
4.打开origin软件,点击菜单栏,文件——打开——具体csv文件
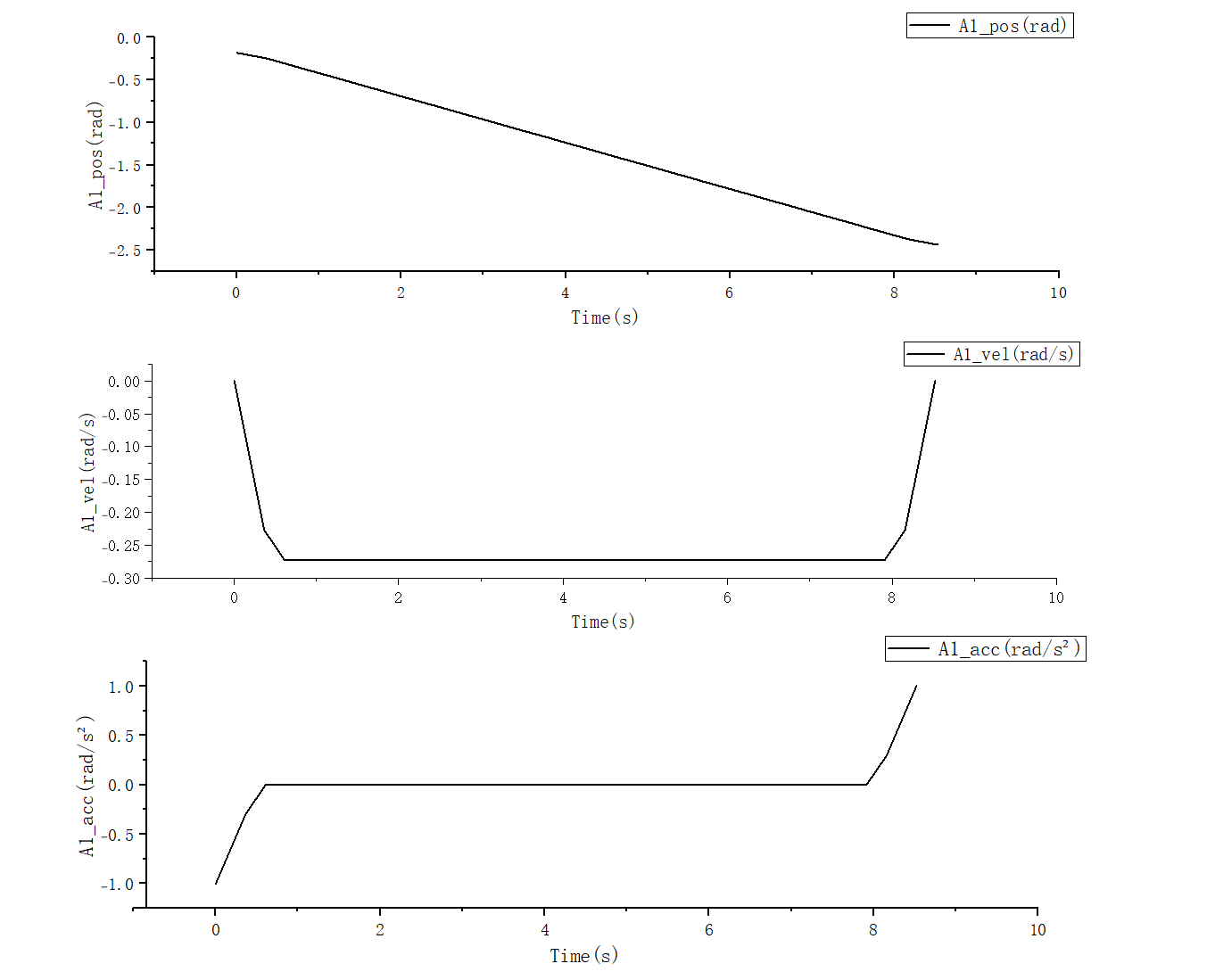
5.选中列 Time(s), A1_pos(rad), A1_vel(rad/s), A1_acc(rad/s²),点击绘图-折现图绘制
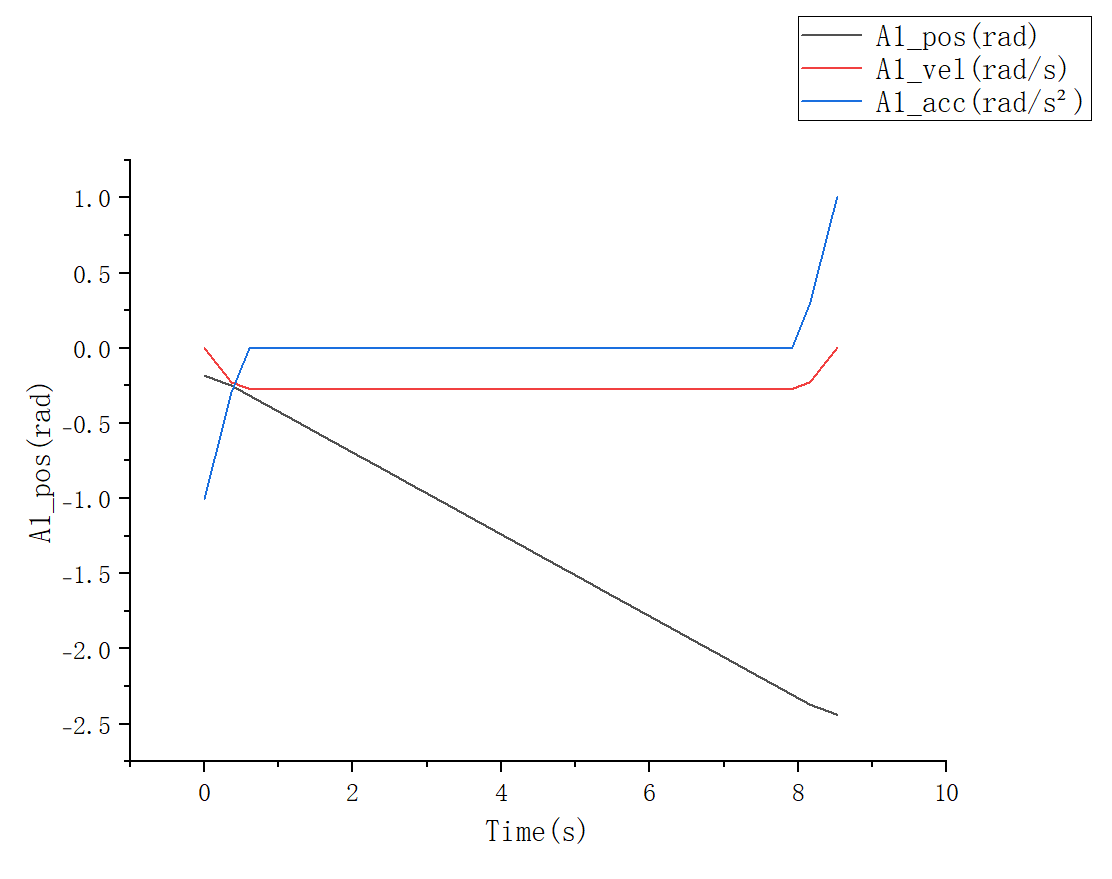
6.复制几个可以形成这样的