【数据结构与算法】图的基本概念与遍历
目录
一、图的基本概念
1.1 图的基本组成
1.2 图的分类
1.3 顶点的度数
1.4 路径与回路
1.5 子图与特殊图
二. 图的存储结构
2.1 邻接矩阵
2.2 邻接表
三、深度优先遍历
3.1 原理
3.2 实现步骤
3.3 代码实现
四、广度优先遍历
4.1 原理
4.2 实现步骤
4.3 代码实现
结语
一、图的基本概念
图是由顶点集合及顶点间的关系组成的一种数据结构:G = (V, E)。
1.1 图的基本组成
顶点(Vertex)
- 图的基本元素,代表具体的对象(如城市、网络节点等),通常用 V 表示顶点集合。
边(Edge)
- 顶点之间的连接关系,代表对象间的关系(如道路、通信链路等),通常用 E 表示边集合。
- 有向边:带有方向的边(用箭头表示),构成有向图。
- 无向边:没有方向的边,构成无向图。
1.2 图的分类
-
按边的方向性分类
- 无向图:所有边均为无向边,边记为 (u, v),且 (u, v)= (v, u) 。
- 有向图:至少存在一条有向边,边记为 <u, v>,表示从 u 到 v 的方向。
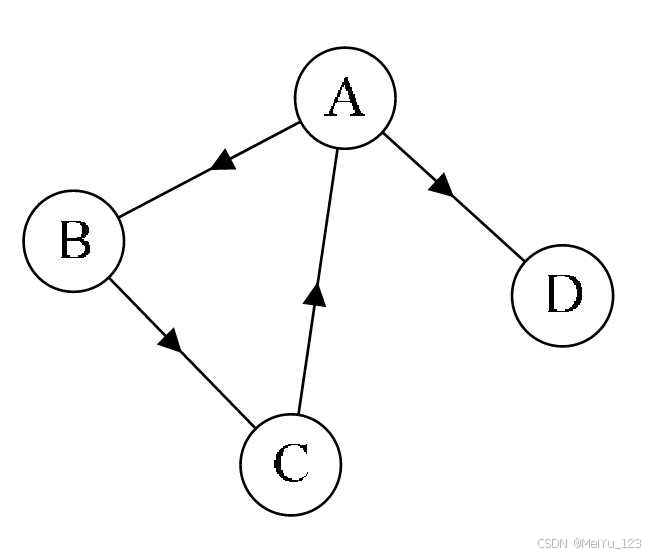
有向图
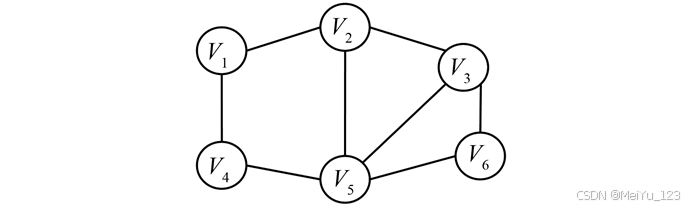
无向图
-
按边是否有权值分类
- 无权图:边仅表示连接关系,无权重(如是否可达)。
- 加权图:每条边带有数值权重(如距离、成本等)。
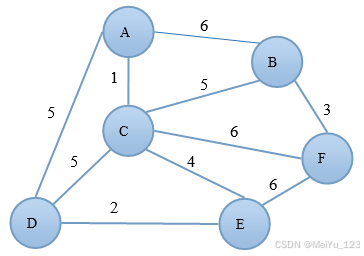
加权图
-
按是否有重复边或自环分类
- 简单图:无重复边、无自环(顶点到自身的边)。
- 多重图:允许重复边(平行边)或自环。
- 完全图:任意两个顶点之间都有一条边(无向完全图有 (n(n-1)2) 条边,有向完全图有 (n(n-1)) 条边,n 为顶点数)。
1.3 顶点的度数
-
无向图中的度数(Degree)
- 顶点 v 的度数是其连接的边数。
- 所有顶点度数之和等于边数的 2 倍(每条边被两个顶点各计数一次)。
- 有向图中的度数
- 入度:指向顶点 v 的边数。
- 出度:顶点 v 发出的边数。
- 顶点度数 = 入度 + 出度。
1.4 路径与回路
- 路径
- 顶点序列 (V1, V2, ......, Vk),其中相邻顶点由边连接。
- 简单路径:路径中所有顶点互不重复(除起点和终点可能相同)。
-
回路
- 起点和终点相同的路径(长度 ≥ 1)。
- 简单回路:除起点和终点外,其余顶点互不重复的回路。
-
连通性
- 无向图:若任意两顶点存在路径,则图是连通图;否则分为多个连通分量。
- 有向图:若任意两顶点 (u -> v) 和 (v -> u) 均有路径,则为强连通图;否则分为强连通分量。
1.5 子图与特殊图
-
子图
- 顶点集和边集均为原图子集的图。
-
二分图
- 顶点可分为两个不相交的集合,所有边均连接两个集合中的顶点(无同一集合内的边)。
-
树
- 无向图中,连通且无回路的图(顶点数 n,边数 (n-1))。
- 有向树:有向图中,仅有一个根节点(入度为 0),其余顶点入度为 1,且从根到所有顶点有唯一路径。
二. 图的存储结构
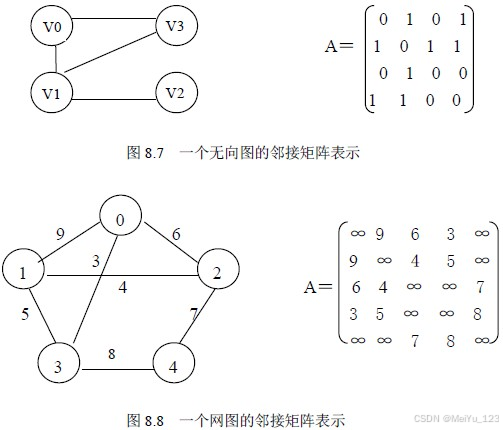
2.1 邻接矩阵
核心思想:
用一个二维矩阵 A 表示顶点之间的连接关系,矩阵大小为 (n * n)(n 为顶点数)
- 无权图:(A[i][j] = 1) 表示存在边 (i -> j)(有向图)或 ((i,j))(无向图),否则为 0。
- 加权图:(A[i][j] = w) 表示边的权重为 w,无边则设为无穷大。
优点:
- 访问边的时间复杂度为(O(1))(直接查矩阵)。
- 适合表示稠密图(边数接近 (n^2))。
缺点:
- 空间复杂度为 (O(n^2)),存储稀疏图(边数少)时浪费空间。
- 遍历一个顶点的所有邻接点需要扫描整行,效率低(O(n))。
2.2 邻接表
每个顶点对应一个列表,存储其相邻顶点(有向图存储出边,无向图存储所有邻接顶点)。
- 无权图:链表中存储相邻顶点的编号。
- 加权图:链表中存储二元组 ((邻接顶点, 权重))。

优点:
- 空间复杂度为 (O(n + e))(e 为边数),适合表示稀疏图。
- 遍历一个顶点的所有邻接点效率高(只需遍历其链表)。
缺点:
- 检查某条边是否存在需要遍历链表。
- 无向图中每条边会被存储两次(在两个顶点的链表中)。
三、深度优先遍历
3.1 原理
深度优先搜索是一种图遍历算法,它沿着一条路径尽可能深入,直到无法继续为止,然后回溯到上一个节点,尝试其他路径。DFS 使用递归或栈实现,适合用于遍历所有可能的路径。
3.2 实现步骤
- 从起点开始:
- 标记当前节点为已访问。
- 输出或处理当前节点。
- 递归访问邻接节点:
- 遍历当前节点的所有邻接节点。
- 如果某个邻接节点未访问,递归调用 DFS。
- 回溯:
- 在递归返回时,回到上一个节点,继续探索其他未访问的邻接节点。
3.3 代码实现
#include <iostream>
#include <vector>void dfs(const std::vector<std::vector<int>>& graph, int node, std::vector<bool>& visited) {visited[node] = true;std::cout << node << " "; // 访问节点for (int i = 0; i < graph.size(); ++i) {if (graph[node][i] == 1 && !visited[i]) {dfs(graph, i, visited);}}
}int main()
{// 示例图(邻接矩阵表示)std::vector<std::vector<int>> graph = {{0, 1, 1, 0, 0, 0},{1, 0, 0, 1, 1, 0},{1, 0, 0, 0, 0, 1},{0, 1, 0, 0, 0, 0},{0, 1, 0, 0, 0, 1},{0, 0, 1, 0, 1, 0}};std::vector<bool> visited(graph.size(), false);std::cout << "DFS: ";dfs(graph, 0, visited); // 从节点 0 开始std::cout << std::endl;return 0;
}四、广度优先遍历
4.1 原理
广度优先搜索是一种逐层遍历图的算法。它从起点开始,先访问所有直接邻接的节点,然后再访问这些节点的邻接节点。BFS 的特点是“逐层扩展”。
4.2 实现步骤
- 初始化队列:
- 将起点加入队列,并标记为已访问。
- 逐层遍历:
- 从队列中取出一个节点。
- 输出或处理该节点。
- 遍历当前节点的所有邻接节点:
- 如果某个邻接节点未访问,将其加入队列,并标记为已访问。
- 重复:
- 继续从队列中取出节点,直到队列为空。
4.3 代码实现
#include <iostream>
#include <queue>
#include <vector>void bfs(const std::vector<std::vector<int>>& graph, int start)
{int n = graph.size();std::vector<bool> visited(n, false);std::queue<int> q;visited[start] = true;q.push(start);while (!q.empty()) {int node = q.front();q.pop();std::cout << node << " "; // 访问节点for (int i = 0; i < n; ++i) {if (graph[node][i] == 1 && !visited[i]) {visited[i] = true;q.push(i);}}}
}int main()
{// 示例图(邻接矩阵表示)std::vector<std::vector<int>> graph = {{0, 1, 1, 0, 0, 0},{1, 0, 0, 1, 1, 0},{1, 0, 0, 0, 0, 1},{0, 1, 0, 0, 0, 0},{0, 1, 0, 0, 0, 1},{0, 0, 1, 0, 1, 0}};std::cout << "BFS: ";bfs(graph, 0); // 从节点 0 开始std::cout << std::endl;return 0;
}结语
最近笔试老是最后一题出个图相关的,写这篇文章是为了复习图的相关知识点与遍历方法,临阵磨枪,希望在接下来的笔试中能应对这种题目。