STM32开发printf函数支持
1、printf函数支持
1、避免使用半主机模式:两种方法:微库法、代码法
2、实现fputc函数:实现单个字符输出
2、半主机模式简介
用于 ARM 目标的一种机制,可将来自应用程序代码的输入/输出请求传送至运行调试器的主机
简单说:就是通过仿真器实现开发板在电脑上的输入和输出
一般我们:不使用半主机模式!!!
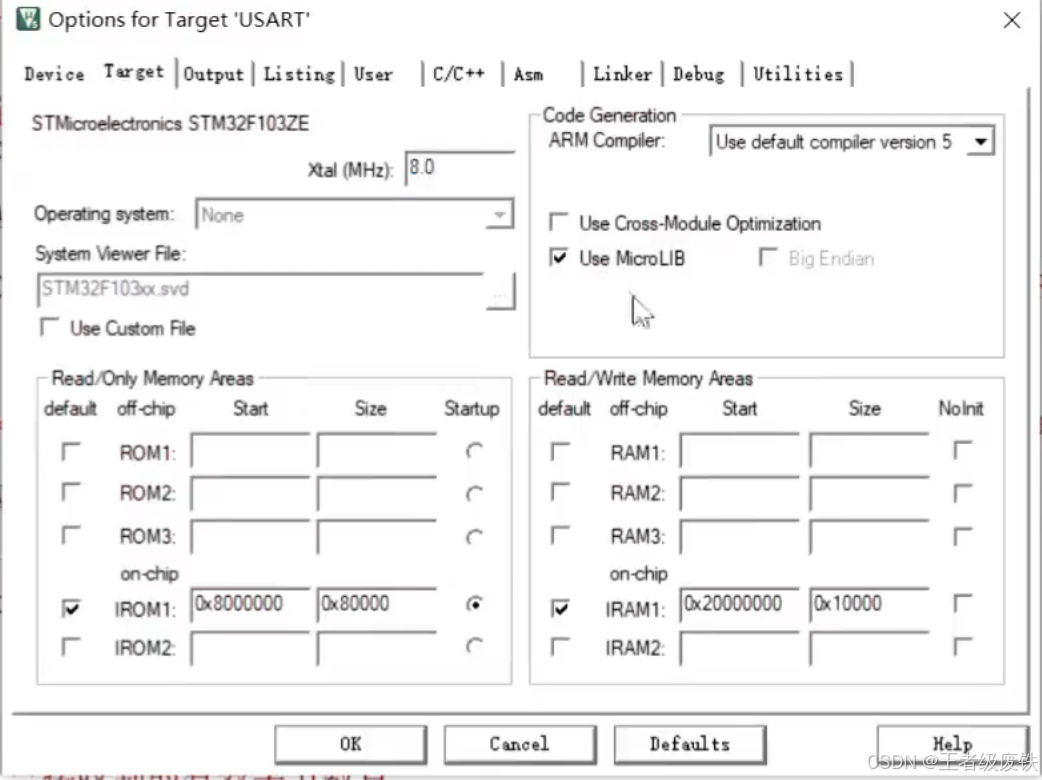
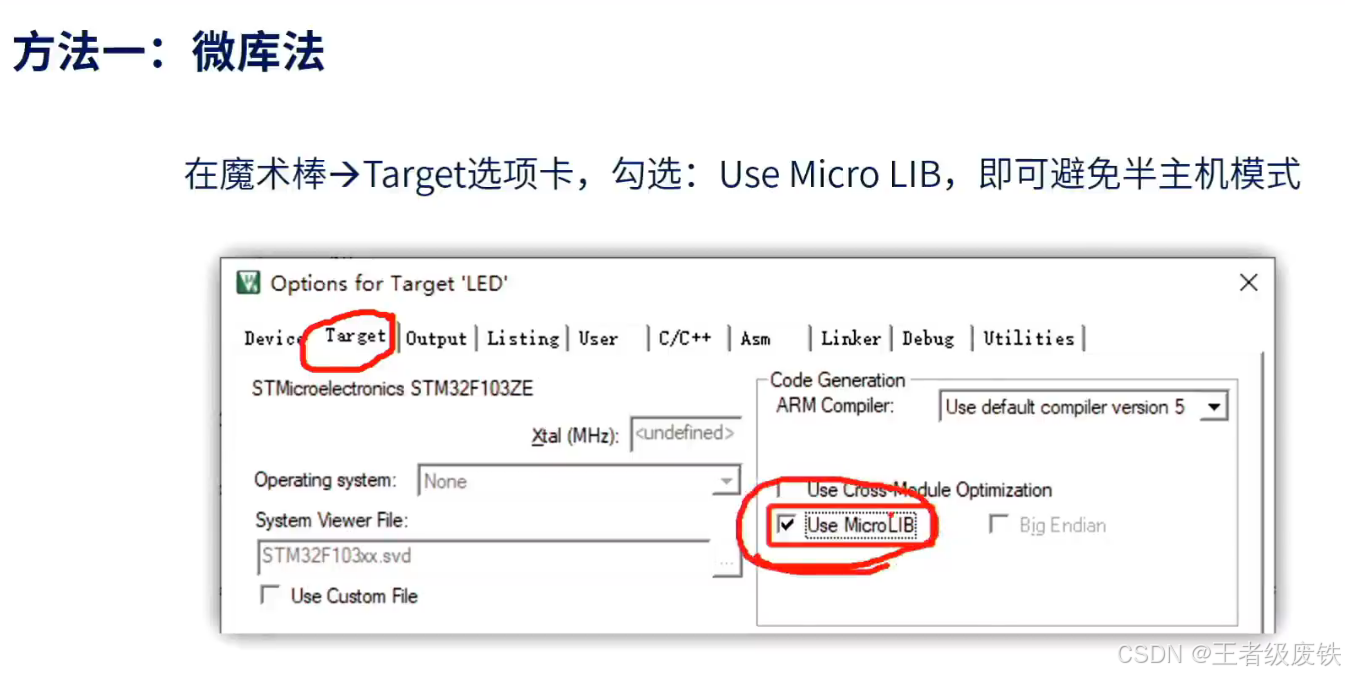
方法一:微库法
在魔术棒→Target选项卡,勾选:Use Micro LlB,即可避免半主机模式
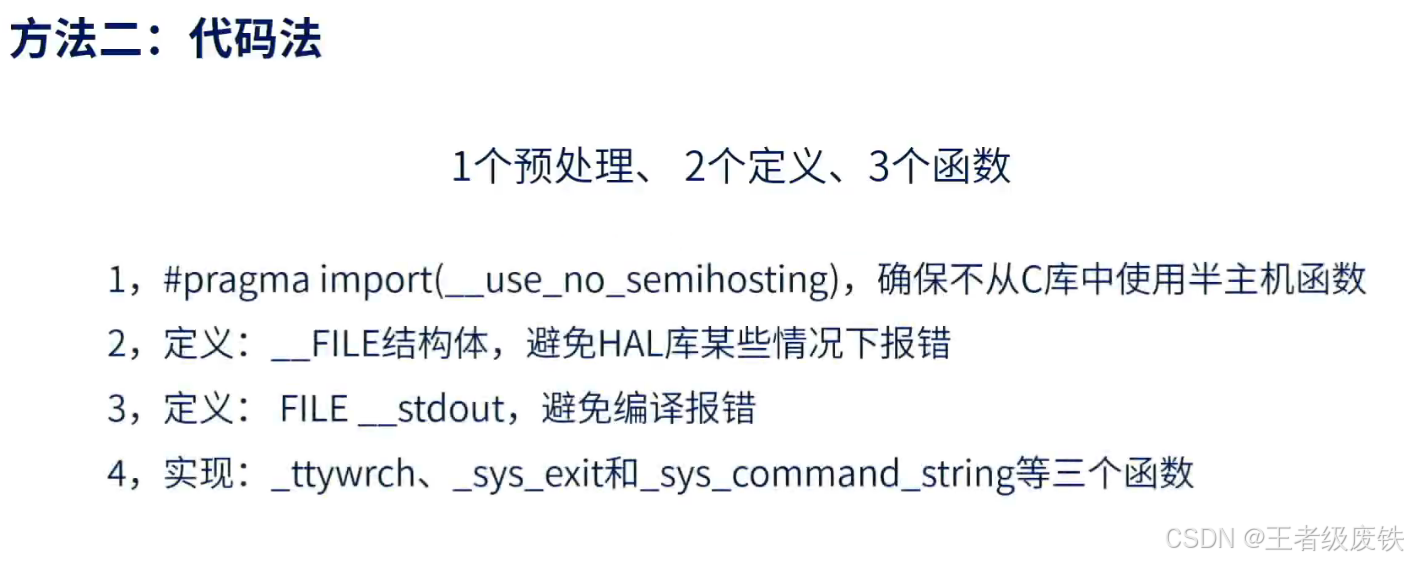
方法二:代码法
1个预处理、2个定义、3个函数
1、#pragmaimport(__use_no_semihosting),确保不从C库中使用半主机函数
2,定义:_FILE结构体,避免HAL库某些情况下报错
3,定义:FILE__stdout,避免编译报错
4,实现:_ttywrch、_sys_exit和_sys_command_string等三个函数
AC5和AC6不使用半主机模式稍有差异,详见源码

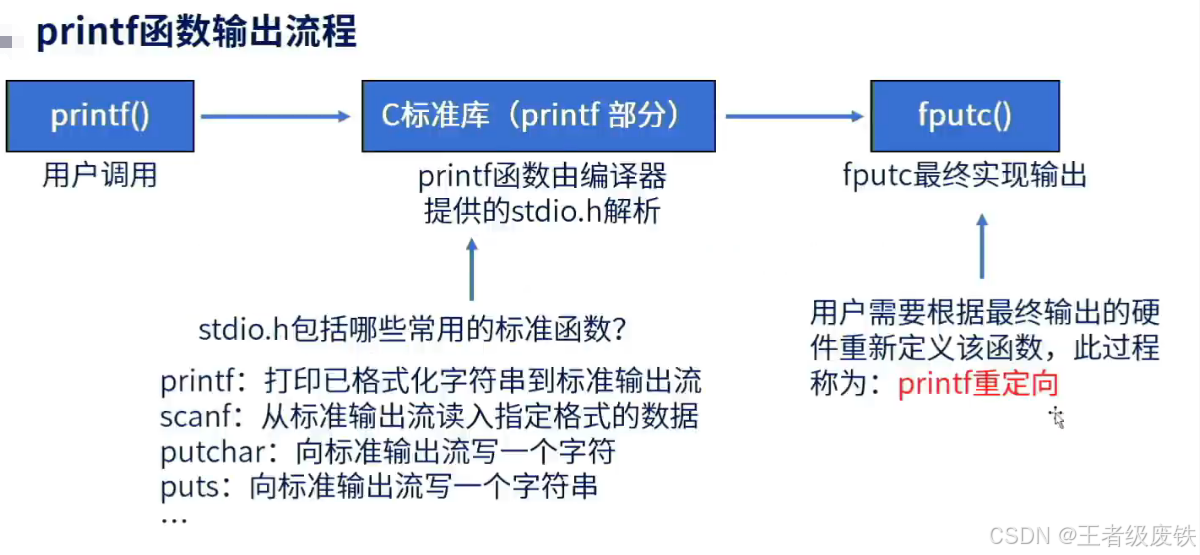
3、C语言中printf函数输出流程
代码实现printf
usart.h
/******************************************************************************************************* @file usart.h* @author 正点原子团队(ALIENTEK)* @version V1.1* @date 2023-06-05* @brief 串口初始化代码(一般是串口1),支持printf* @license Copyright (c) 2020-2032, 广州市星翼电子科技有限公司***************************************************************************************************** @attention** 实验平台:正点原子 STM32F103开发板* 在线视频:www.yuanzige.com* 技术论坛:www.openedv.com* 公司网址:www.alientek.com* 购买地址:openedv.taobao.com** 修改说明* V1.0 20211103* 第一次发布* V1.1 20230605* 删除USART_UX_IRQHandler()函数的超时处理和修改HAL_UART_RxCpltCallback()******************************************************************************************************/#ifndef __USART_H
#define __USART_H#include "stdio.h"
#include "./SYSTEM/sys/sys.h"/******************************************************************************************/
/* 引脚 和 串口 定义 * 默认是针对USART1的.* 注意: 通过修改这几个宏定义,可以支持USART1~UART5任意一个串口.*/
#define USART_TX_GPIO_PORT GPIOA
#define USART_TX_GPIO_PIN GPIO_PIN_9
#define USART_TX_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOA_CLK_ENABLE(); }while(0) /* PA口时钟使能 */#define USART_RX_GPIO_PORT GPIOA
#define USART_RX_GPIO_PIN GPIO_PIN_10
#define USART_RX_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOA_CLK_ENABLE(); }while(0) /* PA口时钟使能 */#define USART_UX USART1
#define USART_UX_IRQn USART1_IRQn
#define USART_UX_IRQHandler USART1_IRQHandler
#define USART_UX_CLK_ENABLE() do{ __HAL_RCC_USART1_CLK_ENABLE(); }while(0) /* USART1 时钟使能 *//******************************************************************************************/#define USART_REC_LEN 200 /* 定义最大接收字节数 200 */
#define USART_EN_RX 1 /* 使能(1)/禁止(0)串口1接收 */
#define RXBUFFERSIZE 1 /* 缓存大小 */extern UART_HandleTypeDef g_uart1_handle; /* HAL UART句柄 */extern uint8_t g_usart_rx_buf[USART_REC_LEN]; /* 接收缓冲,最大USART_REC_LEN个字节.末字节为换行符 */
extern uint16_t g_usart_rx_sta; /* 接收状态标记 */
extern uint8_t g_rx_buffer[RXBUFFERSIZE]; /* HAL库USART接收Buffer */void usart_init(uint32_t bound); /* 串口初始化函数 */#endifusart.c
/******************************************************************************************************* @file usart.c* @author 正点原子团队(ALIENTEK)* @version V1.1* @date 2023-06-05* @brief 串口初始化代码(一般是串口1),支持printf* @license Copyright (c) 2020-2032, 广州市星翼电子科技有限公司***************************************************************************************************** @attention** 实验平台:正点原子 STM32F103开发板* 在线视频:www.yuanzige.com* 技术论坛:www.openedv.com* 公司网址:www.alientek.com* 购买地址:openedv.taobao.com** 修改说明* V1.0 20211103* 第一次发布* V1.1 20230605* 删除USART_UX_IRQHandler()函数的超时处理和修改HAL_UART_RxCpltCallback()******************************************************************************************************/#include "./SYSTEM/sys/sys.h"
#include "./SYSTEM/usart/usart.h"/* 如果使用os,则包括下面的头文件即可. */
#if SYS_SUPPORT_OS
#include "os.h" /* os 使用 */
#endif/******************************************************************************************/
/* 加入以下代码, 支持printf函数, 而不需要选择use MicroLIB */#if 1#if (__ARMCC_VERSION >= 6010050) /* 使用AC6编译器时 */
__asm(".global __use_no_semihosting\n\t"); /* 声明不使用半主机模式 */
__asm(".global __ARM_use_no_argv \n\t"); /* AC6下需要声明main函数为无参数格式,否则部分例程可能出现半主机模式 */#else
/* 使用AC5编译器时, 要在这里定义__FILE 和 不使用半主机模式 */
#pragma import(__use_no_semihosting)struct __FILE
{int handle;/* Whatever you require here. If the only file you are using is *//* standard output using printf() for debugging, no file handling *//* is required. */
};#endif/* 不使用半主机模式,至少需要重定义_ttywrch\_sys_exit\_sys_command_string函数,以同时兼容AC6和AC5模式 */
int _ttywrch(int ch)
{ch = ch;return ch;
}/* 定义_sys_exit()以避免使用半主机模式 */
void _sys_exit(int x)
{x = x;
}char *_sys_command_string(char *cmd, int len)
{return NULL;
}/* FILE 在 stdio.h里面定义. */
FILE __stdout;/* MDK下需要重定义fputc函数, printf函数最终会通过调用fputc输出字符串到串口 */
int fputc(int ch, FILE *f)
{while ((USART_UX->SR & 0X40) == 0); /* 等待上一个字符发送完成 */USART_UX->DR = (uint8_t)ch; /* 将要发送的字符 ch 写入到DR寄存器 */return ch;
}
#endif
/******************************************************************************************/#if USART_EN_RX /*如果使能了接收*//* 接收缓冲, 最大USART_REC_LEN个字节. */
uint8_t g_usart_rx_buf[USART_REC_LEN];/* 接收状态* bit15, 接收完成标志* bit14, 接收到0x0d* bit13~0, 接收到的有效字节数目
*/
uint16_t g_usart_rx_sta = 0;uint8_t g_rx_buffer[RXBUFFERSIZE]; /* HAL库使用的串口接收缓冲 */UART_HandleTypeDef g_uart1_handle; /* UART句柄 *//*** @brief 串口X初始化函数* @param baudrate: 波特率, 根据自己需要设置波特率值* @note 注意: 必须设置正确的时钟源, 否则串口波特率就会设置异常.* 这里的USART的时钟源在sys_stm32_clock_init()函数中已经设置过了.* @retval 无*/
void usart_init(uint32_t baudrate)
{/*UART 初始化设置*/g_uart1_handle.Instance = USART_UX; /* USART_UX */g_uart1_handle.Init.BaudRate = baudrate; /* 波特率 */g_uart1_handle.Init.WordLength = UART_WORDLENGTH_8B; /* 字长为8位数据格式 */g_uart1_handle.Init.StopBits = UART_STOPBITS_1; /* 一个停止位 */g_uart1_handle.Init.Parity = UART_PARITY_NONE; /* 无奇偶校验位 */g_uart1_handle.Init.HwFlowCtl = UART_HWCONTROL_NONE; /* 无硬件流控 */g_uart1_handle.Init.Mode = UART_MODE_TX_RX; /* 收发模式 */HAL_UART_Init(&g_uart1_handle); /* HAL_UART_Init()会使能UART1 *//* 该函数会开启接收中断:标志位UART_IT_RXNE,并且设置接收缓冲以及接收缓冲接收最大数据量 */HAL_UART_Receive_IT(&g_uart1_handle, (uint8_t *)g_rx_buffer, RXBUFFERSIZE);
}/*** @brief UART底层初始化函数* @param huart: UART句柄类型指针* @note 此函数会被HAL_UART_Init()调用* 完成时钟使能,引脚配置,中断配置* @retval 无*/
void HAL_UART_MspInit(UART_HandleTypeDef *huart)
{GPIO_InitTypeDef gpio_init_struct;if (huart->Instance == USART_UX) /* 如果是串口1,进行串口1 MSP初始化 */{USART_TX_GPIO_CLK_ENABLE(); /* 使能串口TX脚时钟 */USART_RX_GPIO_CLK_ENABLE(); /* 使能串口RX脚时钟 */USART_UX_CLK_ENABLE(); /* 使能串口时钟 */gpio_init_struct.Pin = USART_TX_GPIO_PIN; /* 串口发送引脚号 */gpio_init_struct.Mode = GPIO_MODE_AF_PP; /* 复用推挽输出 */gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* IO速度设置为高速 */HAL_GPIO_Init(USART_TX_GPIO_PORT, &gpio_init_struct);gpio_init_struct.Pin = USART_RX_GPIO_PIN; /* 串口RX脚 模式设置 */gpio_init_struct.Mode = GPIO_MODE_AF_INPUT; HAL_GPIO_Init(USART_RX_GPIO_PORT, &gpio_init_struct); /* 串口RX脚 必须设置成输入模式 */#if USART_EN_RXHAL_NVIC_EnableIRQ(USART_UX_IRQn); /* 使能USART1中断通道 */HAL_NVIC_SetPriority(USART_UX_IRQn, 3, 3); /* 组2,最低优先级:抢占优先级3,子优先级3 */
#endif}
}/*** @brief 串口数据接收回调函数数据处理在这里进行* @param huart:串口句柄* @retval 无*/
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{if (huart->Instance == USART_UX) /* 如果是串口1 */{if ((g_usart_rx_sta & 0x8000) == 0) /* 接收未完成 */{if (g_usart_rx_sta & 0x4000) /* 接收到了0x0d(即回车键) */{if (g_rx_buffer[0] != 0x0a) /* 接收到的不是0x0a(即不是换行键) */{g_usart_rx_sta = 0; /* 接收错误,重新开始 */}else /* 接收到的是0x0a(即换行键) */{g_usart_rx_sta |= 0x8000; /* 接收完成了 */}}else /* 还没收到0X0d(即回车键) */{if (g_rx_buffer[0] == 0x0d)g_usart_rx_sta |= 0x4000;else{g_usart_rx_buf[g_usart_rx_sta & 0X3FFF] = g_rx_buffer[0];g_usart_rx_sta++;if (g_usart_rx_sta > (USART_REC_LEN - 1)){g_usart_rx_sta = 0; /* 接收数据错误,重新开始接收 */}}}}HAL_UART_Receive_IT(&g_uart1_handle, (uint8_t *)g_rx_buffer, RXBUFFERSIZE);}
}/*** @brief 串口1中断服务函数* @param 无* @retval 无*/
void USART_UX_IRQHandler(void)
{
#if SYS_SUPPORT_OS /* 使用OS */OSIntEnter();
#endifHAL_UART_IRQHandler(&g_uart1_handle); /* 调用HAL库中断处理公用函数 */#if SYS_SUPPORT_OS /* 使用OS */OSIntExit();
#endif}#endif解析:
1、重定义fputc函数(单字符输出函数), printf函数最终会通过调用fputc输出字符串到串口
/* MDK下需要重定义fputc函数, printf函数最终会通过调用fputc输出字符串到串口 */
int fputc(int ch, FILE *f)
{while ((USART_UX->SR & 0X40) == 0); /* 等待上一个字符发送完成 */USART_UX->DR = (uint8_t)ch; /* 将要发送的字符 ch 写入到DR寄存器 */return ch;
}
1、USART_UX->SR就是状态寄存器USART_SR,这个寄存器的第6位变为1的时候表示这一帧发送完成,第6位为0的时候表示这一帧还未发送完成,表示当前的这个字符发送成功没有
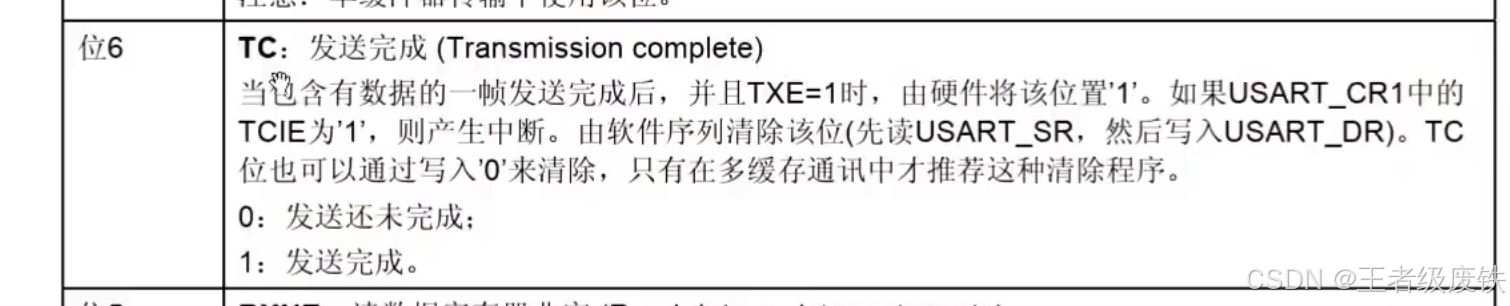
while ((USART_UX->SR & 0X40) == 0); /* 等待上一个字符发送完成 */
2、USART_UX->DR就是数据寄存器,将数据写入这个寄存器,然后串口将这个寄存器的数据发送出去
USART_UX->DR = (uint8_t)ch; /* 将要发送的字符 ch 写入到DR寄存器
3、屏蔽掉状态寄存器监测,会是啥样的
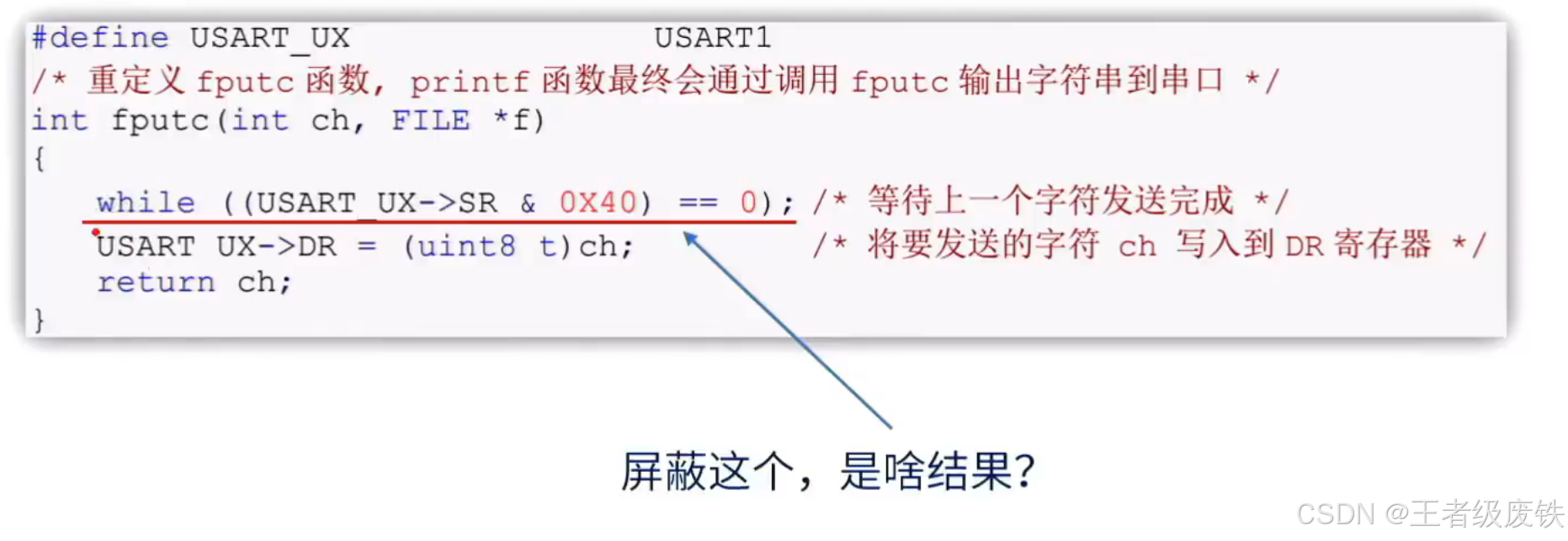
会出现乱码,因为printf是发送字符串,fputc是发送单个字符,如果不检测状态寄存器,printf会一直调用fputc,这是fputc中的数据一直变化,无法正确发出去
微库法实现
usart.c
/******************************************************************************************************* @file usart.c* @author 正点原子团队(ALIENTEK)* @version V1.1* @date 2023-06-05* @brief 串口初始化代码(一般是串口1),支持printf* @license Copyright (c) 2020-2032, 广州市星翼电子科技有限公司***************************************************************************************************** @attention** 实验平台:正点原子 STM32F103开发板* 在线视频:www.yuanzige.com* 技术论坛:www.openedv.com* 公司网址:www.alientek.com* 购买地址:openedv.taobao.com** 修改说明* V1.0 20211103* 第一次发布* V1.1 20230605* 删除USART_UX_IRQHandler()函数的超时处理和修改HAL_UART_RxCpltCallback()******************************************************************************************************/#include "./SYSTEM/sys/sys.h"
#include "./SYSTEM/usart/usart.h"/* 如果使用os,则包括下面的头文件即可. */
#if SYS_SUPPORT_OS
#include "os.h" /* os 使用 */
#endif/******************************************************************************************/
/* 加入以下代码, 支持printf函数, 而不需要选择use MicroLIB */#if 1// #if (__ARMCC_VERSION >= 6010050) /* 使用AC6编译器时 */
// __asm(".global __use_no_semihosting\n\t"); /* 声明不使用半主机模式 */
// __asm(".global __ARM_use_no_argv \n\t"); /* AC6下需要声明main函数为无参数格式,否则部分例程可能出现半主机模式 */// #else
// /* 使用AC5编译器时, 要在这里定义__FILE 和 不使用半主机模式 */
// #pragma import(__use_no_semihosting)// struct __FILE
// {
// int handle;
// /* Whatever you require here. If the only file you are using is */
// /* standard output using printf() for debugging, no file handling */
// /* is required. */
// };// #endif// /* 不使用半主机模式,至少需要重定义_ttywrch\_sys_exit\_sys_command_string函数,以同时兼容AC6和AC5模式 */
// int _ttywrch(int ch)
// {
// ch = ch;
// return ch;
// }// /* 定义_sys_exit()以避免使用半主机模式 */
// void _sys_exit(int x)
// {
// x = x;
// }// char *_sys_command_string(char *cmd, int len)
// {
// return NULL;
// }// /* FILE 在 stdio.h里面定义. */
// FILE __stdout;/* MDK下需要重定义fputc函数, printf函数最终会通过调用fputc输出字符串到串口 */
int fputc(int ch, FILE *f)
{while ((USART_UX->SR & 0X40) == 0); /* 等待上一个字符发送完成 */USART_UX->DR = (uint8_t)ch; /* 将要发送的字符 ch 写入到DR寄存器 */return ch;
}
#endif
/******************************************************************************************/#if USART_EN_RX /*如果使能了接收*//* 接收缓冲, 最大USART_REC_LEN个字节. */
uint8_t g_usart_rx_buf[USART_REC_LEN];/* 接收状态* bit15, 接收完成标志* bit14, 接收到0x0d* bit13~0, 接收到的有效字节数目
*/
uint16_t g_usart_rx_sta = 0;uint8_t g_rx_buffer[RXBUFFERSIZE]; /* HAL库使用的串口接收缓冲 */UART_HandleTypeDef g_uart1_handle; /* UART句柄 *//*** @brief 串口X初始化函数* @param baudrate: 波特率, 根据自己需要设置波特率值* @note 注意: 必须设置正确的时钟源, 否则串口波特率就会设置异常.* 这里的USART的时钟源在sys_stm32_clock_init()函数中已经设置过了.* @retval 无*/
void usart_init(uint32_t baudrate)
{/*UART 初始化设置*/g_uart1_handle.Instance = USART_UX; /* USART_UX */g_uart1_handle.Init.BaudRate = baudrate; /* 波特率 */g_uart1_handle.Init.WordLength = UART_WORDLENGTH_8B; /* 字长为8位数据格式 */g_uart1_handle.Init.StopBits = UART_STOPBITS_1; /* 一个停止位 */g_uart1_handle.Init.Parity = UART_PARITY_NONE; /* 无奇偶校验位 */g_uart1_handle.Init.HwFlowCtl = UART_HWCONTROL_NONE; /* 无硬件流控 */g_uart1_handle.Init.Mode = UART_MODE_TX_RX; /* 收发模式 */HAL_UART_Init(&g_uart1_handle); /* HAL_UART_Init()会使能UART1 *//* 该函数会开启接收中断:标志位UART_IT_RXNE,并且设置接收缓冲以及接收缓冲接收最大数据量 */HAL_UART_Receive_IT(&g_uart1_handle, (uint8_t *)g_rx_buffer, RXBUFFERSIZE);
}/*** @brief UART底层初始化函数* @param huart: UART句柄类型指针* @note 此函数会被HAL_UART_Init()调用* 完成时钟使能,引脚配置,中断配置* @retval 无*/
void HAL_UART_MspInit(UART_HandleTypeDef *huart)
{GPIO_InitTypeDef gpio_init_struct;if (huart->Instance == USART_UX) /* 如果是串口1,进行串口1 MSP初始化 */{USART_TX_GPIO_CLK_ENABLE(); /* 使能串口TX脚时钟 */USART_RX_GPIO_CLK_ENABLE(); /* 使能串口RX脚时钟 */USART_UX_CLK_ENABLE(); /* 使能串口时钟 */gpio_init_struct.Pin = USART_TX_GPIO_PIN; /* 串口发送引脚号 */gpio_init_struct.Mode = GPIO_MODE_AF_PP; /* 复用推挽输出 */gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* IO速度设置为高速 */HAL_GPIO_Init(USART_TX_GPIO_PORT, &gpio_init_struct);gpio_init_struct.Pin = USART_RX_GPIO_PIN; /* 串口RX脚 模式设置 */gpio_init_struct.Mode = GPIO_MODE_AF_INPUT; HAL_GPIO_Init(USART_RX_GPIO_PORT, &gpio_init_struct); /* 串口RX脚 必须设置成输入模式 */#if USART_EN_RXHAL_NVIC_EnableIRQ(USART_UX_IRQn); /* 使能USART1中断通道 */HAL_NVIC_SetPriority(USART_UX_IRQn, 3, 3); /* 组2,最低优先级:抢占优先级3,子优先级3 */
#endif}
}/*** @brief 串口数据接收回调函数数据处理在这里进行* @param huart:串口句柄* @retval 无*/
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{if (huart->Instance == USART_UX) /* 如果是串口1 */{if ((g_usart_rx_sta & 0x8000) == 0) /* 接收未完成 */{if (g_usart_rx_sta & 0x4000) /* 接收到了0x0d(即回车键) */{if (g_rx_buffer[0] != 0x0a) /* 接收到的不是0x0a(即不是换行键) */{g_usart_rx_sta = 0; /* 接收错误,重新开始 */}else /* 接收到的是0x0a(即换行键) */{g_usart_rx_sta |= 0x8000; /* 接收完成了 */}}else /* 还没收到0X0d(即回车键) */{if (g_rx_buffer[0] == 0x0d)g_usart_rx_sta |= 0x4000;else{g_usart_rx_buf[g_usart_rx_sta & 0X3FFF] = g_rx_buffer[0];g_usart_rx_sta++;if (g_usart_rx_sta > (USART_REC_LEN - 1)){g_usart_rx_sta = 0; /* 接收数据错误,重新开始接收 */}}}}HAL_UART_Receive_IT(&g_uart1_handle, (uint8_t *)g_rx_buffer, RXBUFFERSIZE);}
}/*** @brief 串口1中断服务函数* @param 无* @retval 无*/
void USART_UX_IRQHandler(void)
{
#if SYS_SUPPORT_OS /* 使用OS */OSIntEnter();
#endifHAL_UART_IRQHandler(&g_uart1_handle); /* 调用HAL库中断处理公用函数 */#if SYS_SUPPORT_OS /* 使用OS */OSIntExit();
#endif}#endif屏蔽掉代码法实现的部分,然后设置Use MicroLIB