模糊控制理论(含仿真)
本文讲解模糊控制理论、设计步骤以及案例。
1. 模糊控制原理:
模糊控制(Fuzzy Control)是一种基于模糊逻辑推理的人类经验规则实现的控制方法,适用于对系统模型不精确或难以建立精确数学模型的复杂系统。它利用“如果…那么…”(IF-THEN)形式的规则来模拟人类专家的控制策略。
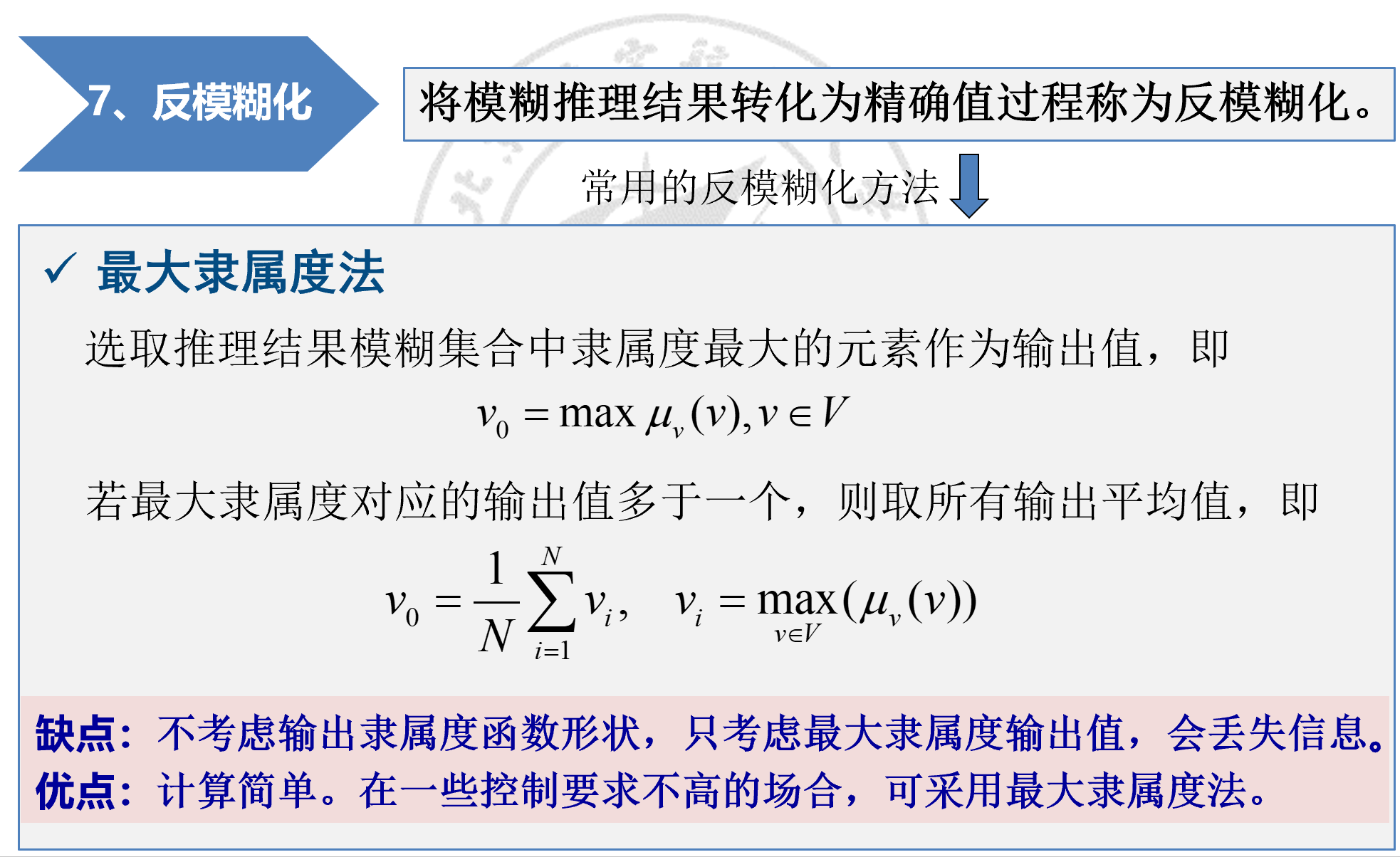
模糊控制器的核心思想是:通过模糊化(Fuzzification)将输入变量转化为模糊集合,在模糊推理(Inference)机制下进行规则匹配,并通过解模糊化(Defuzzification)将模糊输出转化为具体的控制量,形成最终的控制指令。
其主要特点包括:
-
不依赖被控对象的精确数学模型;
-
具有较强的鲁棒性和容错能力;
-
能实现基于经验的智能控制。
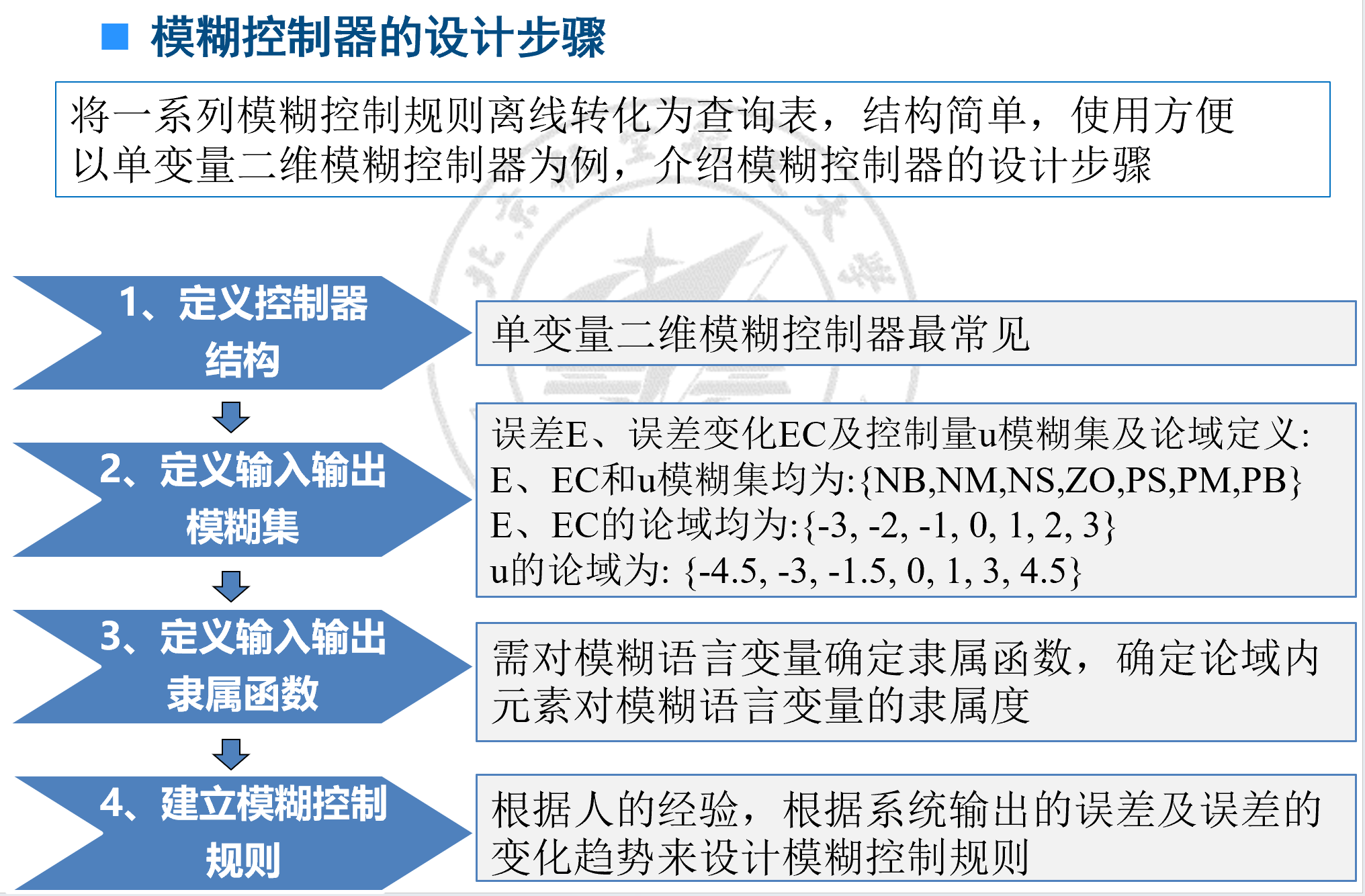
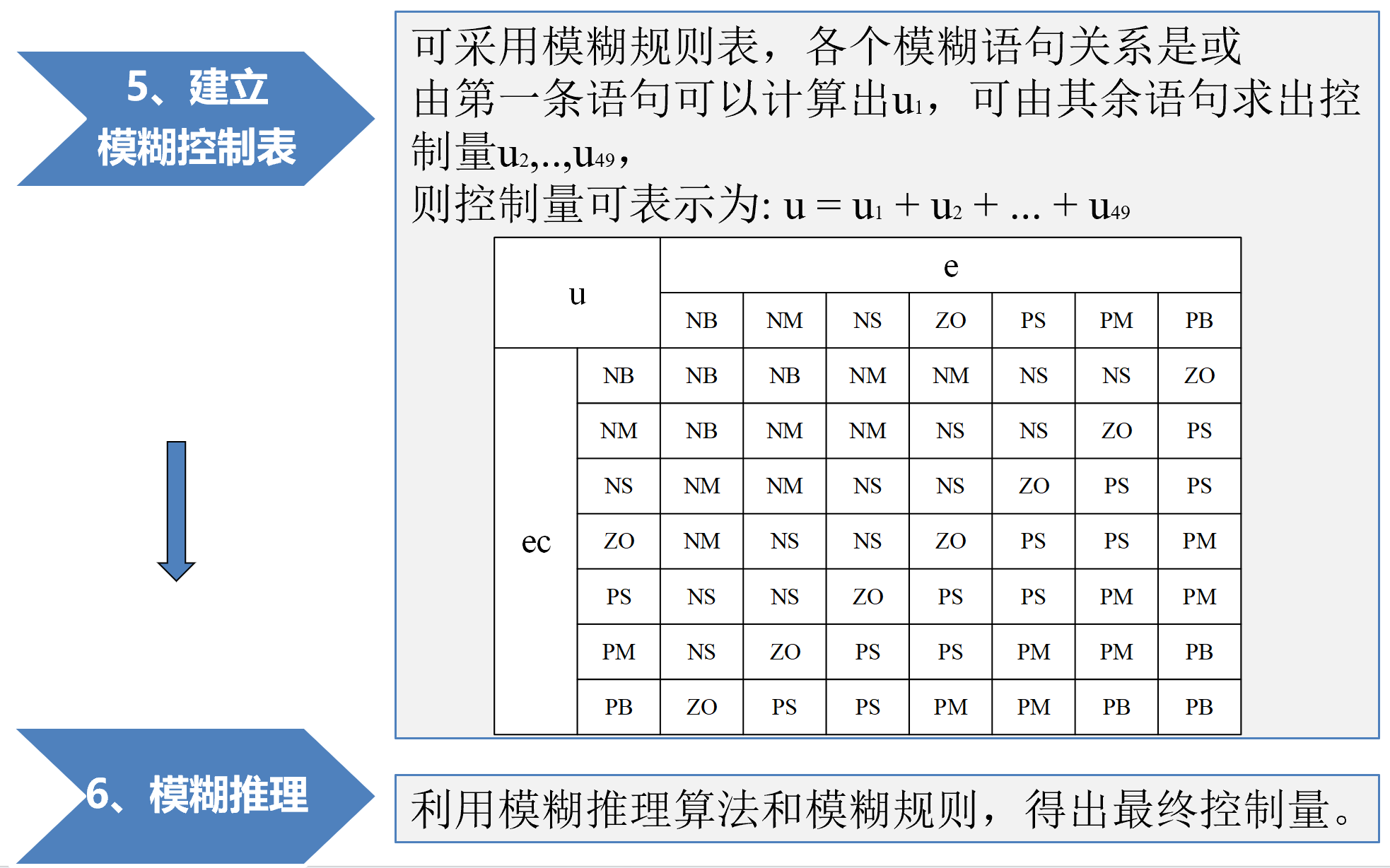
2. 模糊控制器设计步骤:
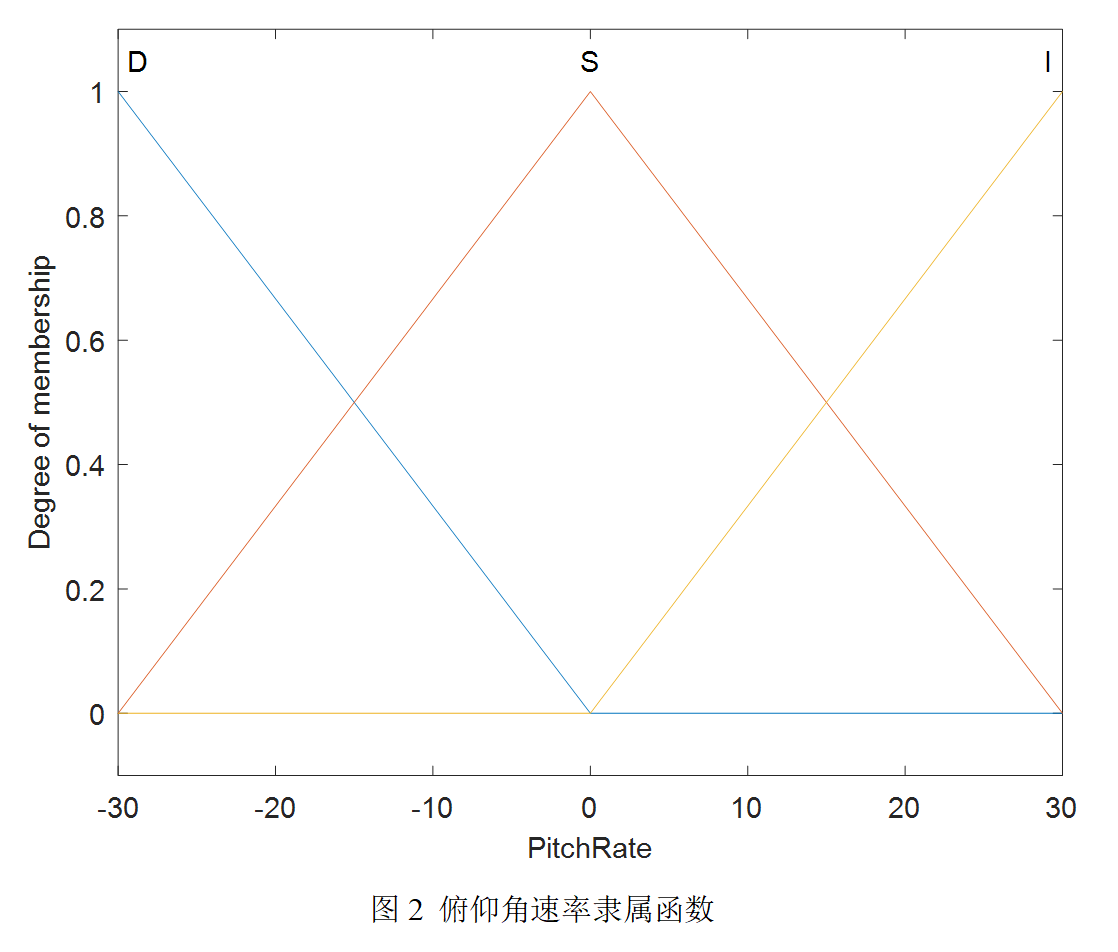
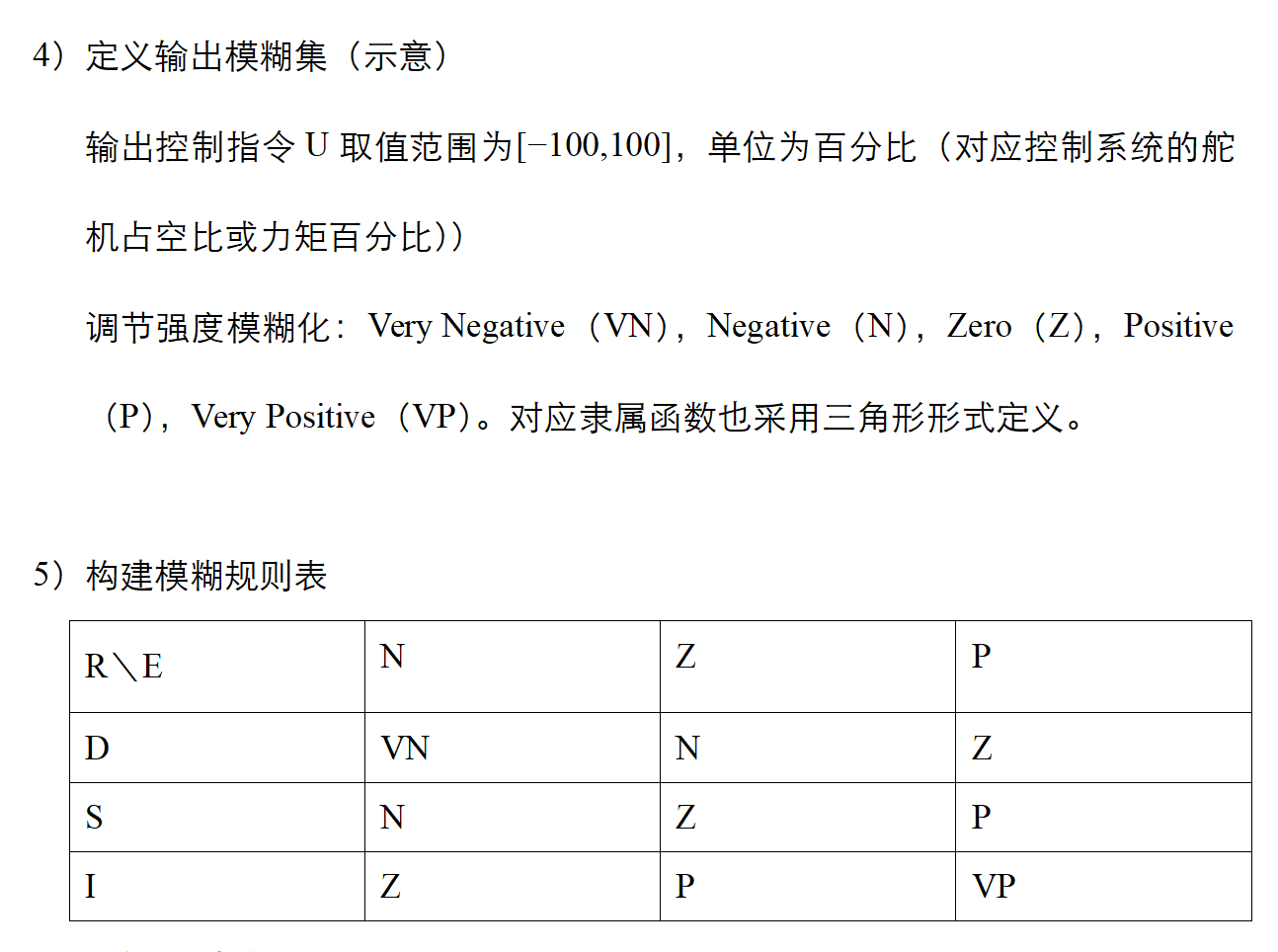
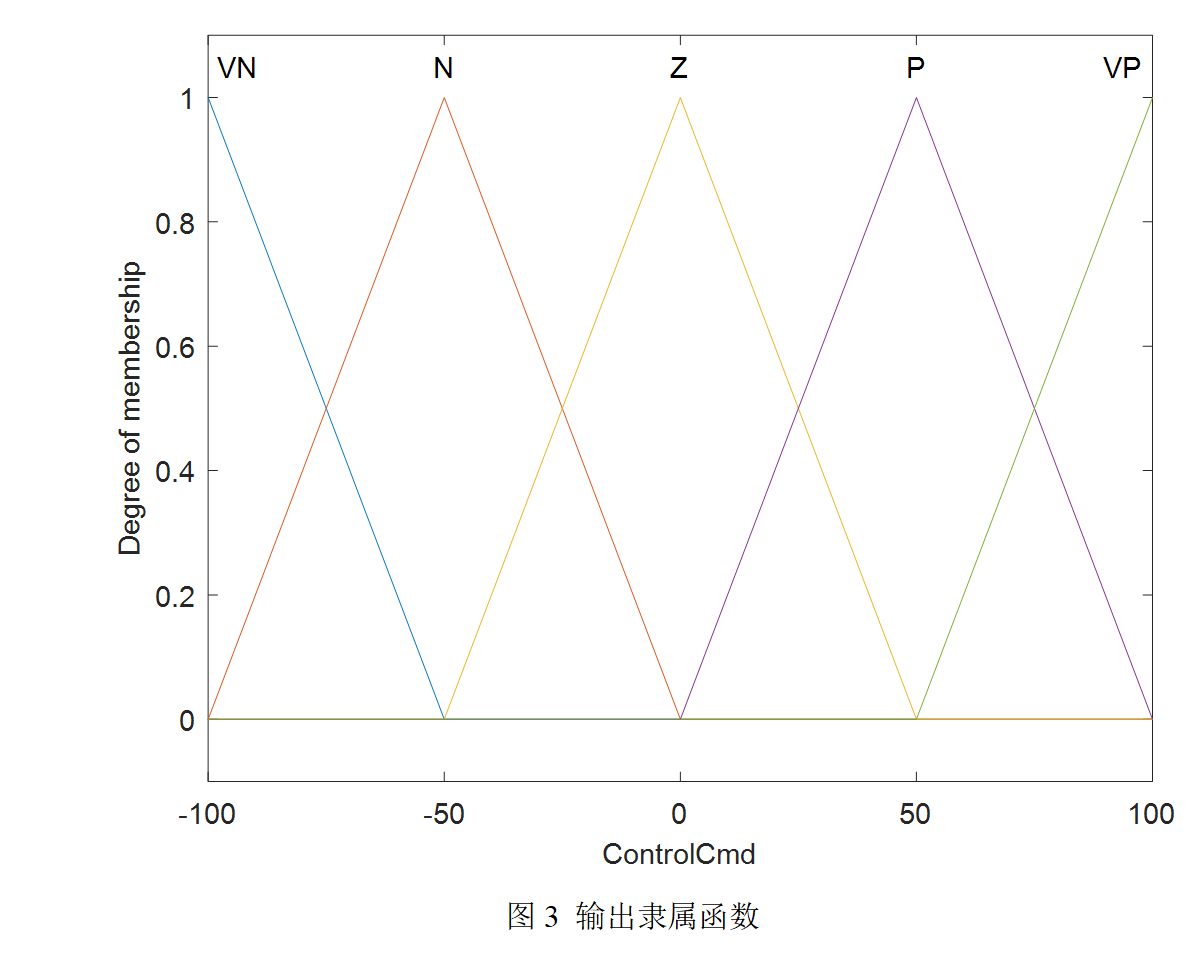
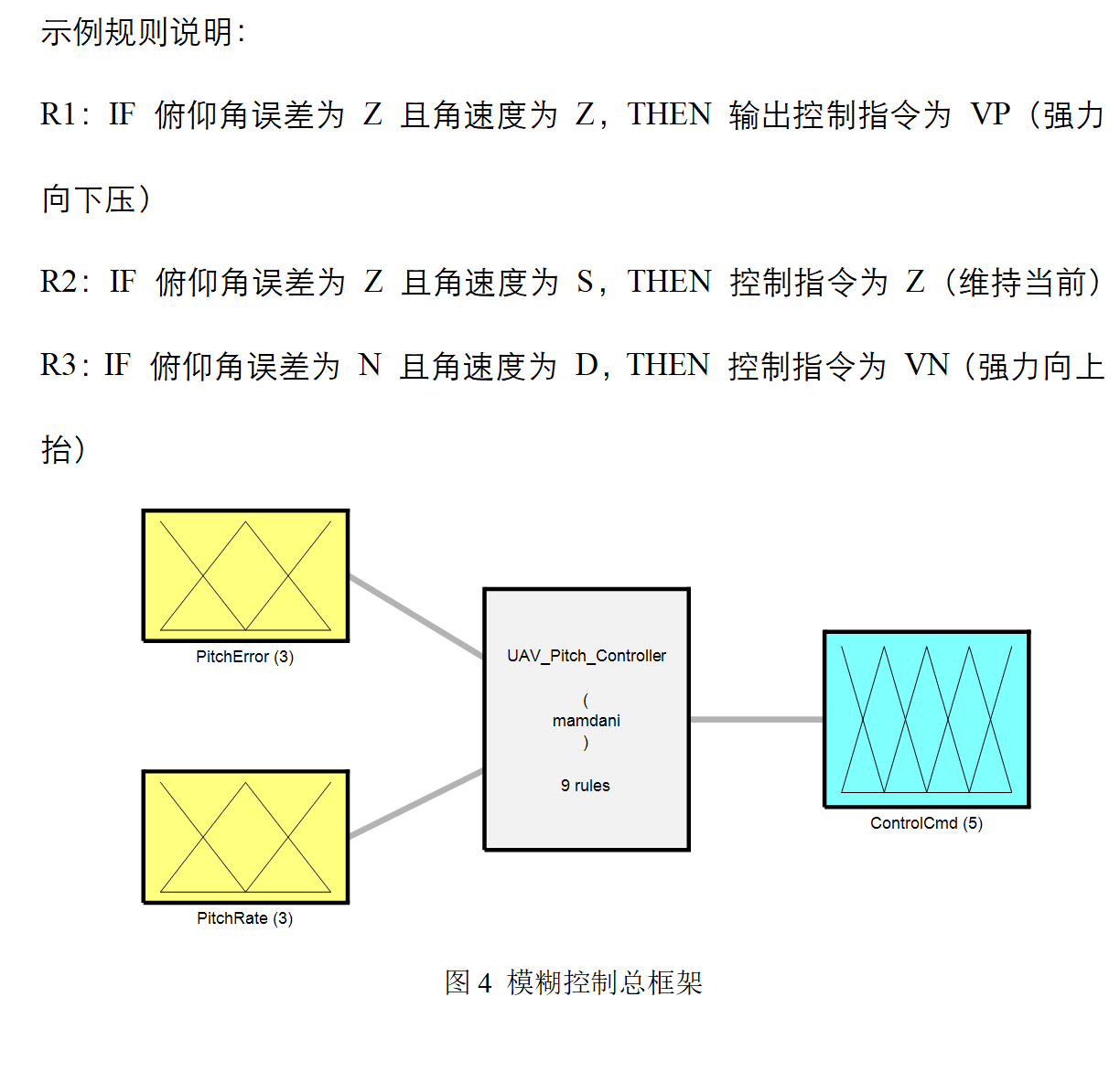
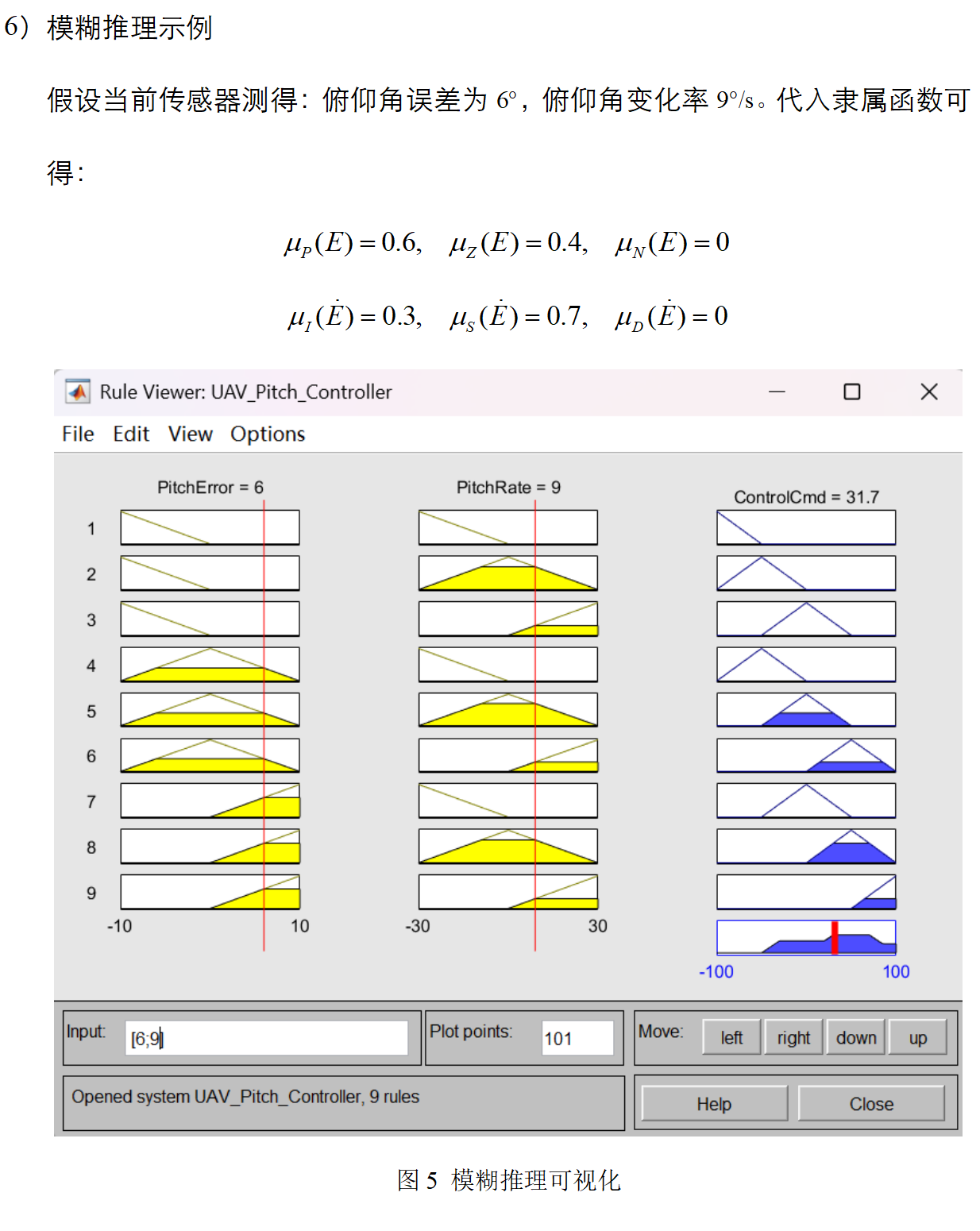
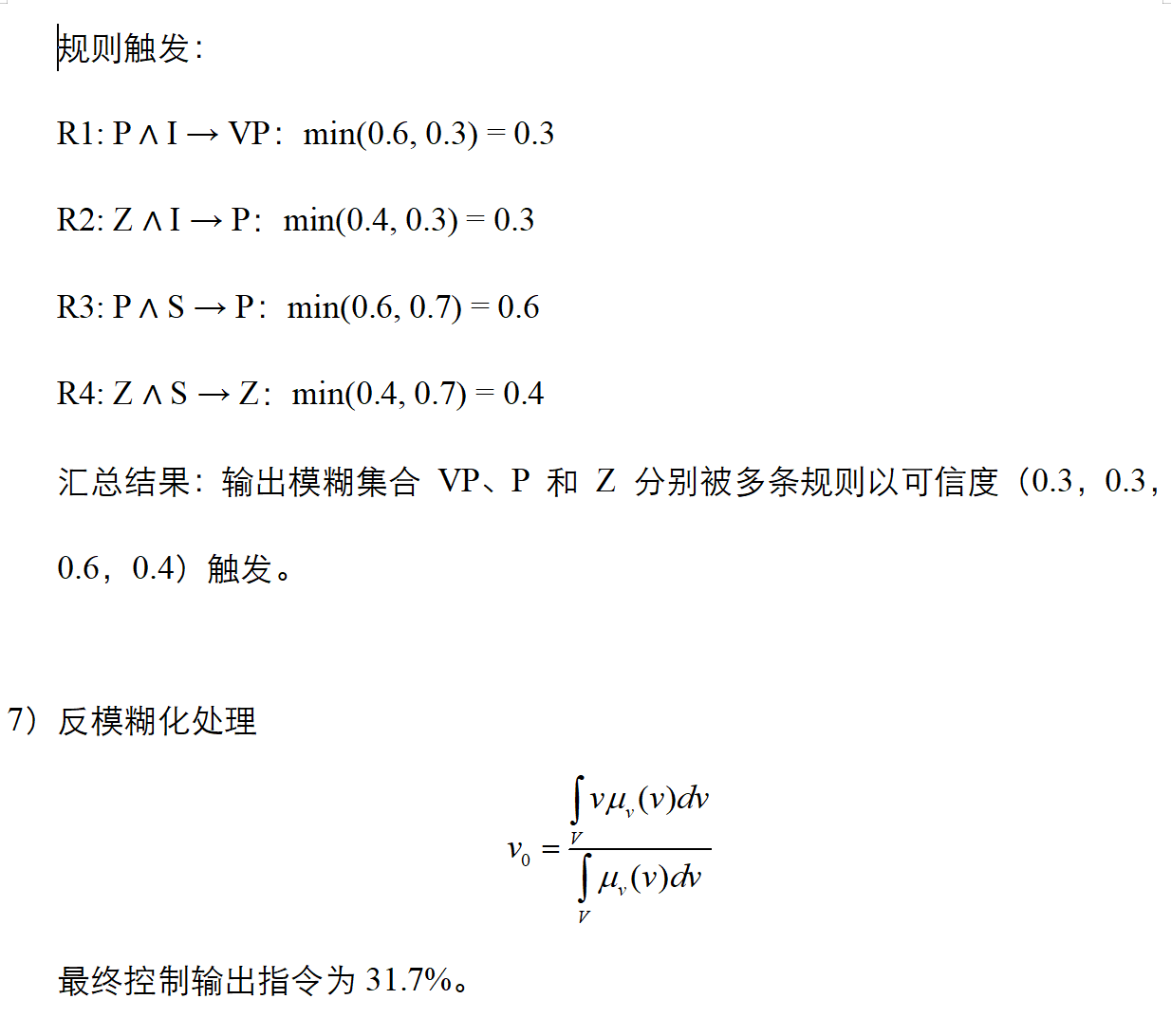
3. 模糊控制案例