PID中低通滤波算法的详细讲解
目录
一阶低通滤波的基本原理
伪代码示例
具体步骤总结
结语
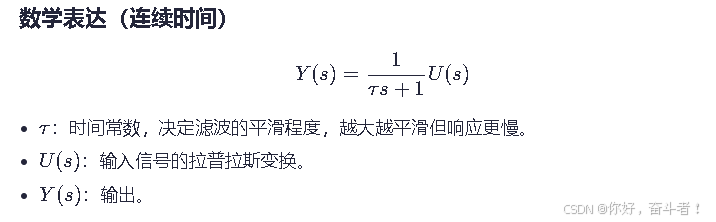
一阶低通滤波的基本原理
一阶低通滤波器的目标是允许低频信号通过,衰减高频干扰信号。它可以用来平滑传感器测得的信号,抑制噪声,特别是在电机控制、机器人、自动化系统中常用。
假设你控制系统的采样时间为 ΔtΔt,你希望滤除噪声、平滑信号,比如电机PWM值。
伪代码示例
float tau = 0.1; // 时间常数,调节平滑程度
float delta_t = 0.01; // 采样周期,例如10ms
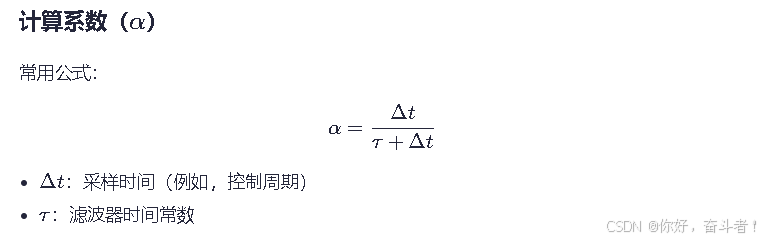
float alpha = delta_t / (tau + delta_t); float motor_pwm_raw = read_sensor_or_input(); // 输入信号(未滤波的PWM值)
static float motor_pwm_filtered = 0; // 用于存储滤波后值 // 一阶低通滤波
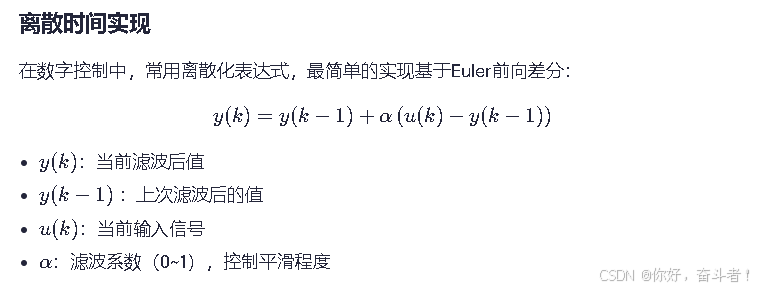
motor_pwm_filtered = motor_pwm_filtered + alpha * (motor_pwm_raw - motor_pwm_filtered); 每次采样时:
- 使用上次滤波后的值作为当前的输出
- 通过公式逐次更新,达到平滑效果
具体步骤总结
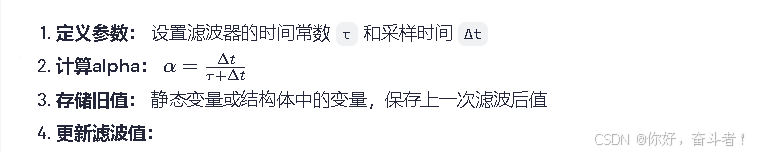
filtered_value = previous_filtered_value + alpha * (raw_input - previous_filtered_value); 结语
一阶低通滤波是实现平滑的基本方法,简单易用,效果显著。通过调整时间常数可以控制滤波的强度,达到抗噪声和响应速度的平衡。