英伟达Newton与OpenTwins如何重构具身智能“伴随式数采”范式
具身智能的“数据饥荒”:行业痛点与技术瓶颈的深度剖析
1.1 具身智能的现状与核心挑战
Embodied AI的落地之路面临着多重严峻挑战。在算法层面,实现通用智能仍需人类的持续介入,并且从感知到行动的认知映射尚未完全打通。在硬件层面,机器人系统的耐用性、能源效率以及软硬件的深度集成仍是制约其大规模部署的关键瓶颈。所有挑战中最根本、最核心的瓶颈,莫过于数据层面。研究显示,物理世界中的高质量、多样化数据极度稀缺,仅依靠合成数据训练的模型往往难以应对现实世界的复杂性和多样性,容易在真实环境中“崩溃”。机器人对不同环境的适应和泛化能力,直接取决于其训练数据的多样性。
这种数据瓶颈的成因并非偶然,而是由一系列深层因素交织而成。大规模真实数据的采集成本极为高昂,需要投入大量的人力、物力与时间。在复杂的环境中布置大量传感器和监测设备,其采购、安装、维护和更新费用都十分昂贵。物理世界的场景极其丰富且动态多变,要穷尽所有可能的情况几乎是不可能完成的任务。机器人可能需要在各种气候、地形和社会环境中工作,全面采集这些场景数据在现实中是无法企及的。不同机器人构型之间的差异使得数据难以复用,例如人形机器人和轮式机器人的数据因其运动和交互方式不同,通用性很低。这种缺乏实体间数据共享的局面,加剧了重复劳动和资源浪费,形成了阻碍行业发展的“数据孤岛”。解决数据问题不仅是成本效率的优化,更是决定具身智能能否从实验室走向大规模商业化落地的“成败之战”。
1.2 传统数据采集的成本与效率困境
要深刻理解具身智能的数据困境,必须正视传统数据采集模式所面临的成本与效率挑战。获取大规模、高质量的机器人训练数据主要依赖于劳动密集型和资本密集型的真机采集与人工标注。
真机数据采集本身就成本不菲。一条真机数据的综合成本可能高达十几元。为了训练机器人学会一项任务,数据采集员需要反复调整物品位置,每天重复采集约200条数据,直至机器人学会为止。这种手动的、场景化的数据采集模式,不仅耗时耗力,而且进展缓慢。训练一个非常好的模型可能需要约一万小时的交互数据,这种巨大的时间投入对于任何企业而言都是沉重的负担。
数据采集只是第一步,后续的数据标注环节则是一道难以逾越的“人肉长城”。高质量的数据标注对于构建准确可靠的AI模型至关重要。这项工作通常由人工完成,其成本高昂、效率低下且重复枯燥,随着数据量和标注精细度要求的不断提升,人工标注的成本也在不断攀升。以行业服务为例,Amazon SageMaker Ground Truth的定价显示,对单张图像进行审核的成本可达0.08美元,而更复杂的语义分割任务价格则更高。对于多模态数据的标注,成本将呈几何级数增长。除了高昂的费用,传统模式在数据质量控制上也面临挑战。采集到的多模态数据需要进行时间和空间上的严格对齐,以确保不同传感器数据之间的同步性和准确性。人工审核员需要仔细检查数据在时间刻度上是否对齐、画面是否有缺失,这些繁琐的质量控制流程进一步降低了数据的使用效率,使得传统模式的边际成本难以降低。
这种高门槛、低效率的数据采集模式对行业生态产生了深远影响。它使得高质量数据资源高度集中在少数拥有雄厚资本和技术实力的巨头企业手中,对中小创业团队而言,数据采集、大模型训练与评测等工作都构成了难以逾越的高门槛。这直接导致了具身智能研究和商业化进程的资源不平衡,加剧了前面提到的“数据孤岛”问题,阻碍了整个行业的知识共享和协同创新。要实现具身智能的广泛普及和商业化,必须从根本上革新数据采集和训练的范式。
新范式之基石:英伟达Newton与数字孪生技术
2.1 物理AI的核心驱动:英伟达Newton物理引擎
要构建全新的数据采集范式,必须引入能够精确模拟物理世界,并能与AI模型深度融合的新一代技术。英伟达推出的开源物理引擎Newton,正是这一技术变革的核心驱动力。该项目由英伟达与谷歌DeepMind、迪士尼研究院等行业巨头合作开发,旨在为机器人仿真提供一个统一、可扩展且可定制的解决方案。
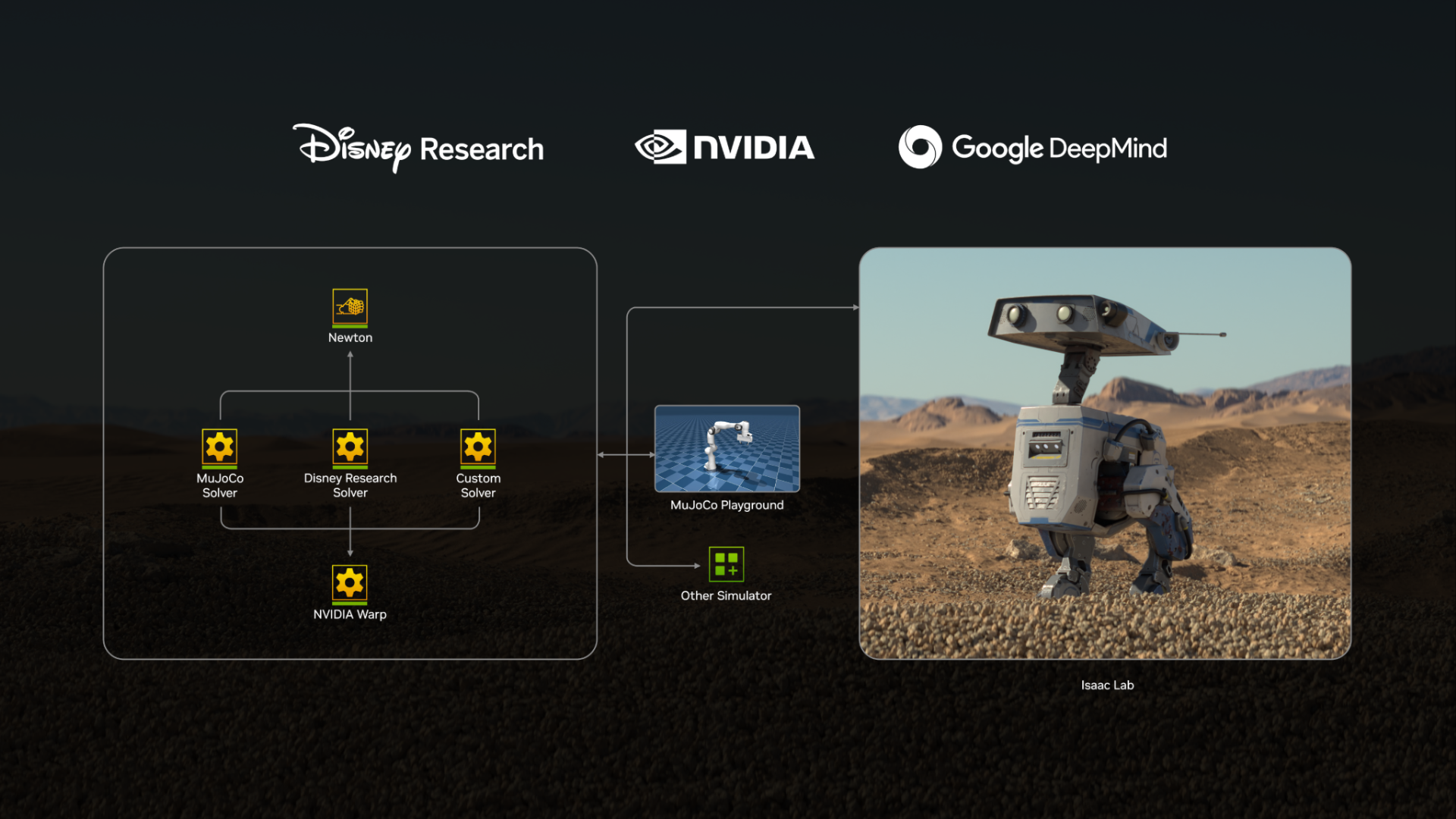
GPU加速与超实时操作:Newton基于英伟达的Warp框架构建,充分利用GPU的并行计算能力,实现了高精度的物理模拟和超实时操作。这使得机器人能够在虚拟环境中以更高的精度和效率学习处理复杂的任务。
Differentiable Physics:这是Newton最具革命性的技术特性。它不仅能像传统物理引擎那样,从给定输入预测仿真结果,还能计算仿真结果的反向模式梯度。这种能力使得系统参数的优化可以通过反向传播直接进行,这意味着机器人可以像训练神经网络一样,通过物理交互直接学习,弥补了现实世界数据无法完整涵盖所有物理知识的缺陷。
基于OpenUSD构建:Newton基于OpenUSD构建,这是一种开放、可扩展的3D场景描述语言。与谷歌、迪士尼等公司的合作,旨在利用OpenUSD来统一机器人工作流,并为所有数据源提供通用语言。这一举措在底层架构上打破了数据孤岛的藩篱,为构建一个开放、可共享的具身智能数据生态奠定了坚实基础。
Newton的出现标志着物理AI进入了一个新的时代。它不仅仅是一个仿真器,更是一个能够让机器人自主感知、解释、推理并与现实世界交互的虚拟试验场。其可微物理特性将物理模拟从简单的“模拟现实”提升到了“学习现实”,让AI系统能够直接从虚拟世界的物理交互中获得宝贵的梯度信息,大幅提升学习效率和泛化能力。
2.2 连接物理与虚拟:数字孪生的赋能力量
如果说Newton是物理AI的“大脑”,那么数字孪生则是连接其与物理世界感知的“躯体”。数字孪生是物理世界在虚拟空间中的高保真复刻,能够实时、动态地映射实体对象、流程和设施。它的价值在于提供一个可控、可分析的虚拟环境,以便团队进行设计、模拟和运营优化。
在工业领域,数字孪生早已不是新鲜概念,它在制造业、汽车、能源等多个行业得到了广泛应用。其核心能力在于虚实联动:通过IoT和IIoT传感器,数字孪生能够实时获取物理设备和生产线的动态数据,将一个静态的3D模型转化为一个与现实完全同步的“实时孪生体”。这种实时数据驱动的能力为工业生产带来了诸多好处:
实时监控与故障回溯:数字孪生平台能够接入百万级数据连接,让工程师实时监控设备状态,并可通过时序数据回溯到历史时间点,快速排查故障。
预测性维护:通过持续监控,数字孪生可以识别潜在的故障,并在设备完全失效前发出警报,从而大幅降低停机时间和维护成本。
虚拟调试与仿真:数字孪生是一个关键的“AI试验场”,团队可以在虚拟环境中安全地测试和验证高级工业AI模型,如机器人编队和气流仿真,然后再将其部署到现实世界中。
数字孪生与AI的融合远不止于数据的可视化和分析。它将物理世界的数据与虚拟世界的仿真能力相结合,形成一个强大的闭环系统。将从传感器采集的有限数据输入到数字孪生中,可以构建一个高度仿真的虚拟生产状态,并通过数据可视化建模进行对比分析。这种“融合AI&仿真能力”的平台,为实现用户提出的“伴随式数采”方案提供了完美的技术基础。它将现实中的复杂生产环境以可控、可分析的形式呈现,并提供一个可供Newton物理引擎进行“多物理场仿真”的虚拟环境。
创新融合:Accompanied Data Collection的革命性方案
3.1 伴随式数采的定义与核心架构
“伴随式数采”的概念,是对传统数据采集模式的根本性突破。它并非指简单的跟随机器人,而是一种无感、无侵入的数据采集范式。在这种模式下,数据采集不再是需要专门部署和中断生产线的独立任务,而是成为具身智能机器人日常运营的
伴随副产品。这意味着,机器人每执行一个任务,每一次与环境的交互,都将作为数据源,持续不断地为整个系统贡献数据。这种模式将数据采集从一个昂贵的、离散的“项目”转变为一个低成本、持续性的“服务”。
这种革命性范式的实现,依赖于英伟达Newton和OpenTwins的创新整合架构:
前端采集:具身智能机器人本身成为“伴随式”数据采集的端点。它们通过搭载的多模态传感器阵列实时、无缝地获取生产环境中的各类数据。这包括机器人的本体姿态、力矩数据、操作动作,以及环境中的视觉图像、点云数据和声音等信息。
数据传输与对齐:轻量化的数据采集端点将这些多模态数据实时、高效地传输至云端数字孪生平台。在这个过程中,数据对齐服务至关重要,它确保来自不同传感器的数据在时间和空间上精确同步,为后续的仿真和分析提供高质量基础。
中台孪生:云端的数字孪生平台将实时数据进行映射、建模与存储,构建一个与物理生产线完全同步、高还原度的“实时孪生体”。这个孪生体不仅是物理世界的镜像,更是所有数据的汇聚中心,支持事件回放、远程监控和分析洞察等功能。
仿真与AI引擎:孪生体作为核心“数据种子”,喂给集成Newton物理引擎的智能仿真引擎。
这种架构从根本上解决了传统数据采集模式“昂贵、耗时、需人工操作”的痛点。它将数据采集自动化并背景化,使得企业可以在不中断现有生产流程的前提下,逐步实现智能化转型。这大幅降低了具身智能的试错成本和部署风险,将高昂的资本投资转变为一种可控的、持续性的运营优化服务,为“具身智能+”应用场景的广泛推广提供了切实可行的路径。
3.2 数据价值的指数级放大:仿真驱动的数据增广
“伴随式数采”方案最具颠覆性的价值,在于其能够实现数据价值的指数级放大。
真实数据映射:将通过“伴随式数采”采集到的真实机器人操作数据作为“种子”,实时映射到数字孪生平台中的虚拟机器人上。这些数据包含了物理世界的底层约束和真实操作的宝贵信息。
物理引擎重演:利用英伟达Newton的可微物理引擎,在虚拟环境中对真实操作过程进行高保真的精确重演。
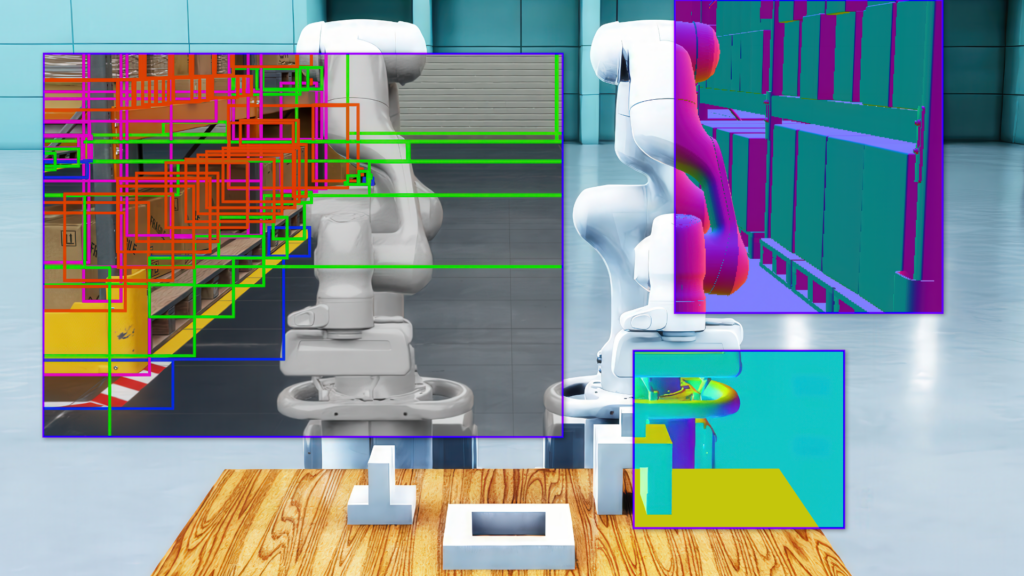
参数化增广:在重演过程中,系统通过程序化地随机改变物理和视觉参数来生成一系列新的训练样本。这部分能力由NVIDIA Omniverse Replicator等工具提供支持,它能够通过异步渲染和基于事件的触发器,大规模生成带有精确注释的合成数据。例如,可以改变:
材质特性:调整物体的摩擦力、硬度等物理参数。
光照条件:模拟不同光线强度、方向,甚至极端光照条件下的场景。
环境干扰:模拟物体的轻微抖动、位置偏移、甚至遮挡。
视觉纹理:改变物体的颜色、表面纹理等,以增强模型的泛化能力。
这一过程的巧妙之处在于,它利用了真实数据作为物理约束的基石,而借助了物理引擎的强大增广能力。这使得生成的合成数据并非凭空捏造,而是物理上合理、逻辑上自洽的有效训练样本。这种技术路径直接解决了“难以穷尽所有现实场景”的挑战,尤其在应对现实世界中罕见、危险或难以复现的“长尾问题”方面展现出巨大优势。通过仿真,企业可以安全、高效地生成这些极端案例数据,大幅提升模型的泛化能力和在复杂环境中的鲁棒性。
这种范式的出现,将具身智能企业的核心竞争力从“谁拥有最多的真机和最大的采集场地”转变为“谁拥有最高效、最智能的数据生成与管理管道”。这一转变与互联网时代的演变轨迹不谋而合,即核心价值从硬件基础设施转向了算法与数据平台。通过仿真驱动的数据增广,数据利用效率得到了指数级提升,为具身智能的快速发展注入了全新的动力。
成本与效率的量化分析
4.1 传统模式与新范式的成本对比
传统数据采集模式的成本构成:
| 成本项 | 成本构成与来源 | 备注 | |
| 真机数据采集 | 约人民币10-20元/条 | 包含人力、机器、场地等直接成本 | 复杂的多模态数据标注成本更高 |
| 人工标注 | 图像分类:0.08 USD/张 | 语义分割:0.84 USD/张 | |
| 硬件与运维 | 搭建专用物理场地、机器人硬件损耗、专家操作等高昂成本 | ||
| 长尾数据获取 | 极高的边际成本,难以规模化 | 需为罕见场景单独投入资源 |
伴随式数采新范式的成本构成:
| 成本项 | 成本构成与来源 | 备注 |
| 真实数据采集 | 约人民币10-20元/条 | 成本显著降低,主要源于无感、无侵入模式的效率提升 |
| 仿真数据生成 | 约人民币两分钱/条 | 成本仅为真机数据的1/500,且可批量生成 |
| 硬件与运维 | 依赖虚拟仿真环境,避免了对昂贵硬件的过度依赖 | 成本大幅降低,用于服务器等计算资源 |
| 长尾数据获取 | 通过仿真批量生成,几乎没有边际成本 | 从根本上解决了长尾问题的经济性挑战 |
4.2 加速投资回报:效率提升的关键
数据利用效率的倍增:大模型的出现已经将数据采集量需求大幅减少,数据采集效率得以提升数倍。在此基础上,“伴随式数采”通过仿真驱动的数据增广,进一步将单条真实数据的利用价值提升了10-15倍。这种复合式的效率提升,使得模型训练所需的数据量得以指数级减少,从而极大缩短了训练周期。
Sim-to-Real技术的改进:将仿真环境中训练的模型部署到真实世界,面临着Sim-to-Real的挑战。过去,这种迁移存在典型的传感和驱动差异,导致模型在真实世界中泛化能力差。随着技术的进步,现在已有解决方案能够有效克服这些差异,例如通过顺序运动模糊缓解策略优化视觉感知系统,以及采用反馈线性化方法补偿动作差异。这些技术的成熟使得从虚拟到真实的知识迁移变得更加可靠,极大地减少了真机调试和测试的时间与成本。
开发流程的闭环化:传统模式下的开发流程是一个缓慢、昂贵的瀑布流模型:首先进行昂贵的数据采集和标注,然后训练模型,最后进行耗时耗力的真机测试。而“伴随式数采”则将这一过程转变为一个经济、快速的迭代闭环:无感采集-孪生映射-仿真增广-模型训练。这种流程的根本性转变,使得企业能够以更高的频率进行迭代和优化,将模型从概念开发到实际部署的周期大幅缩短。
这种范式转变从根本上解决了长尾问题带来的经济性挑战。传统模式下,为解决罕见情况需要投入极高的边际成本进行单独的数据采集和标注,这在商业上是难以持续的。而“伴随式数采”通过仿真批量生成这些数据,几乎没有额外的边际成本,这不仅是效率问题,更是商业模式可持续性的核心。
超越数据:伴随式数采的未来演进与产业影响
5.1 为具身大模型提供新一代“血液”
具身智能领域的下一步发展,正聚焦于具身基础大模型的研发与应用。如同ChatGPT之于语言,这些基础模型旨在通过海量数据的预训练,掌握通用的感知、理解、推理和执行能力。基础模型的性能,直接取决于其训练数据的规模、多样性和质量。传统的互联网数据虽然海量,却缺乏与物理世界交互的宝贵信息,例如动作、物理反馈和环境变化。这正是具身大模型面临的“数据鸿沟”。
“伴随式数采”为填补这一鸿沟提供了理想的解决方案。它能够持续、自动地提供高质量、大规模的多模态数据集,包含图像、点云、文本、触觉、听觉等多种模态信息。这些数据不仅提供了物理世界的真实环境反馈,还包含了机器人操作的丰富动作信息,这正是互联网数据所缺失的“血液”。高质量、场景化的数据将驱动具身大模型的持续迭代与性能提升。
“伴随式数采”是SSL的天然加速器。自监督学习通过从无标签数据中自动生成“伪标签”,让模型学习有意义的表示,从而大幅减少对昂贵人工标注的依赖。可以利用从数字孪生中生成的带有精确注释的合成数据,作为自监督学习的训练素材。这种方法可以进一步降低数据成本,加速模型的训练和迭代,使具身智能的开发更加高效。
5.2 推动新型工业化与智能制造
“伴随式数采”的范式,将对智能制造和新型工业化产生深远影响。它使得每一个在生产线上的机器人不再仅仅是一个执行任务的工具,而是一个持续的“动态传感器”,源源不断地为数字孪生平台贡献数据。这些来自不同机器人、不同工位的海量数据汇聚在一起,将实现对整个工厂、车间、乃至产线全要素的实时、全景洞察。
这种模式为智能制造提供了无处不在、无所不及的底层OT数据,实现了“数据驱动业务”的闭环,是工业4.0/5.0和新型工业化发展的关键技术。它将推动具身智能从“单点应用”走向“系统集成”。此外,它还能够有效对抗智能制造系统中存在的“AI幻觉”风险。研究表明,AI幻觉常因传感器数据中的噪声或异常而产生。而“伴随式数采”通过数字孪生和物理引擎的校准,能够提供更纯净、更符合物理规律的数据,从源头降低AI幻觉的风险,确保决策的可靠性。
这种范式将生产过程中的操作数据、环境数据、物理数据等进行结构化和场景化积累,使其成为可复用、可变现的“数据资产”。这将为传统制造业带来新的商业模式和增长点,其市场价值潜力巨大,被估算将超过10万亿美元,是互联网行业的三倍之多。
关于TsingtaoAI
TsingtaoAI致力于终结具身智能"最后一公里"困局,让企业AI应用验证效率提升70%,开发周期缩短50%,帮助企业更快速且低成本实现具身智能落地应用。公司已通过华为昇腾Ascend Compatible认证,拥有300+技术专家团队和20项AI领域知识产权,服务领域涵盖智能制造、高校实训等多个场景。