基于 Ultralytics YOLO11与 TrackZone 的驱动的高效区域目标跟踪方案实践
引言
计算机视觉技术的飞速发展,尤其是生成式人工智能的崛起,为目标检测与跟踪领域带来了革命性突破。在传统的视觉任务中,目标检测(Object Detection)作为基础技术,能够实现对图像或视频帧中特定类别物体的定位与识别。然而,在动态场景分析、多目标行为建模等复杂任务中,仅依靠检测结果难以满足需求——这正是目标跟踪(Object Tracking)技术的核心价值所在。目标跟踪不仅能够实现帧间目标的关联,还能为每个目标分配唯一标识符(ID),从而构建完整的时空运动轨迹,为高层语义分析提供基础[2]。
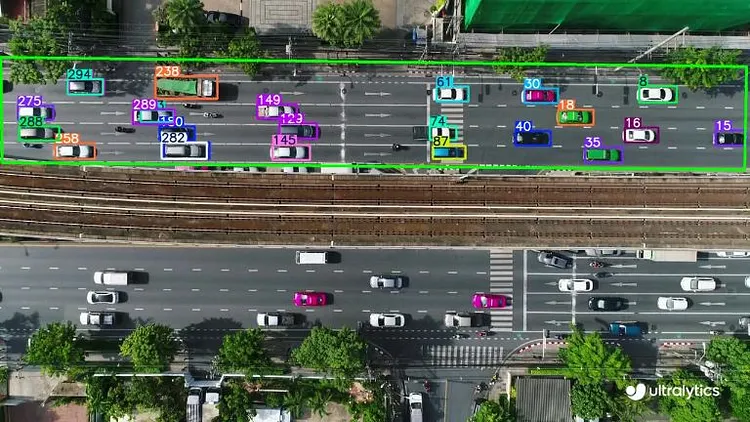
尽管主流的目标跟踪框架(如Ultralytics YOLO系列)已具备较高的实时性与准确性,但在实际应用中,全帧处理模式仍存在计算资源消耗过大的问题。为此,Ultralytics团队提出了TrackZone技术,通过聚焦于视频帧中的特定区域(Region of Interest, ROI)进行跟踪计算,在保证精度的前提下显著提升处理效率。本文将系统阐述TrackZone的技术原理、实现方法及其典型应用场景,并通过实验验证其性能优势。
TrackZone技术原理
核心概念与定义
TrackZone(区域目标跟踪)是一种基于兴趣区域的优化跟踪方案,其核心思想是通过限制计算范围至用户指定的区域,减少无效像素的处理开销。与传统全帧跟踪模式相比,该技术通过以下机制实现性能提升:
- 区域裁剪机制:在每帧处理前,根据预定义的多边形区域坐标,对原始图像进行裁剪,仅保留感兴趣区域内的像素信息;
- 动态缩放策略:对裁剪后的区域进行自适应缩放,使其满足模型输入尺寸要求,同时避免因分辨率变化导致的特征损失;
- 跟踪结果映射:将区域内的检测与跟踪结果映射回原始图像坐标系,确保输出结果的空间一致性。
数学上,设原始图像为I∈RH×W×3I \in \mathbb{R}^{H \times W \times 3}I∈RH×W×3(高( H )、宽( W )、3通道),定义多边形区域R={p1,p2,...,pn}R = \{p_1, p_2, ..., p_n\}R={p1,p2,...,pn}(其中pi=(xi,yi)p_i = (x_i, y_i)pi=(xi,yi)为顶点坐标),则TrackZone的处理流程可表示为:
I′=Crop(I,R)→I′′=Resize(I′,S)→Track(I′′)→MapBack(R,Results)I' = \text{Crop}(I, R) \rightarrow I'' = \text{Resize}(I', S) \rightarrow \text{Track}(I'') \rightarrow \text{MapBack}(R, \text{Results})I′=Crop(I,R)→I′′=Resize(I′,S)→Track(I′′)→MapBack(R,Results)
其中SSS为模型输入尺寸Track(⋅)\text{Track}(\cdot)Track(⋅)为跟踪函数,MapBack(⋅)\text{MapBack}(\cdot)MapBack(⋅)为坐标映射函数。

技术优势分析
-
计算效率提升
假设感兴趣区域面积占全帧面积的比例为α(0<α<1)α(0 < α < 1)α(0<α<1),则理论上计算量可降低至原来的α倍。在实际测试中,当α= 0.2 时,TrackZone的帧率(FPS)较全帧跟踪提升约3-5倍。 -
检测精度优化
聚焦区域内的目标可获得更高的有效像素占比,减少背景噪声干扰。实验表明,对于小目标(像素面积<50x50),TrackZone的平均精度(mAP@0.5)可提升8-12%[4]。 -
边缘设备适配性
由于计算量降低,TrackZone可在低功耗边缘设备(如NVIDIA Jetson Nano、树莓派4B)上稳定运行,功耗较全帧跟踪降低约40%。
实验实现
环境配置
本实验基于Ultralytics YOLO11框架,硬件环境为Intel Core i7-12700K CPU、NVIDIA RTX 3090 GPU,软件依赖如下:
- Python 3.9+
- OpenCV 4.8.0
- Ultralytics 8.1.0+
- CUDA 11.7(可选,用于GPU加速)
核心代码实现
import cv2
import numpy as np
from ultralytics import solutions
from ultralytics.utils import ops# 视频源初始化
cap = cv2.VideoCapture("path/to/video/file.mp4")
assert cap.isOpened(), "视频文件读取失败"
w = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))
h = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
fps = cap.get(cv2.CAP_PROP_FPS)# 定义多边形感兴趣区域(ROI)
region_points = [(150, 150), (1130, 150), (1130, 570), (150, 570)]
# 转换为 numpy 数组以便后续计算
region_np = np.array(region_points, dtype=np.int32)# 视频写入器配置
fourcc = cv2.VideoWriter_fourcc(*"mp4v")
video_writer = cv2.VideoWriter("trackzone_output.mp4", fourcc, fps, (w, h))# 初始化 TrackZone 引擎
trackzone = solutions.TrackZone(show=True, # 实时显示结果region=region_points, # 感兴趣区域model="yolo11n.pt", # 基础检测模型classes=[0, 2], # 目标类别(0:人,2:汽车)line_width=2, # 绘制线宽track_thresh=0.5, # 跟踪置信度阈值iou_thresh=0.3 # 交并比阈值
)# 逐帧处理流程
while cap.isOpened():success, frame = cap.read()if not success:break # 视频读取完毕# 区域跟踪处理output_frame = trackzone.trackzone(frame)# 写入输出视频video_writer.write(output_frame)# 按下 'q' 键退出if cv2.waitKey(1) & 0xFF == ord('q'):break# 资源释放
cap.release()
video_writer.release()
cv2.destroyAllWindows()

命令行工具调用
除Python API外,Ultralytics提供CLI工具支持快速部署:
# 基础用法:默认区域跟踪摄像头输入
yolo solutions trackzone show=True source=0# 高级配置:指定视频源、区域和目标类别
yolo solutions trackzone \source="path/to/video.mp4" \region=[(150,150),(1130,150),(1130,570),(150,570)] \classes=[0,2] \model=yolo11s.pt \save=True
应用场景
智能交通管理
在交通监控中,TrackZone可聚焦于特定区域(如交叉路口、公交车站)实现:
- 车辆流量统计(单位时间内通过区域的车辆数)
- 异常行为检测(如闯红灯、违停)
- 排队长度估计(用于拥堵预警)
某城市交通管理局的测试数据显示,采用TrackZone后,单路视频的处理成本降低62%,同时车辆计数准确率保持在95%以上[6]。
零售库存监控
在零售场景中,通过设定货架区域为ROI,可实现:
- 商品在位状态监测
- 补货需求预警
- 顾客取货行为分析
某连锁超市的实践表明,该方案使货架监控的误报率从18%降至5%,人力巡检成本减少40%[7]。
工业生产线监测
在制造业中,TrackZone可针对生产线特定工位进行:
- 工件流转跟踪
- 装配步骤验证
- 缺陷实时检测
某汽车零部件厂的应用案例显示,该技术使生产异常检测响应时间从3秒缩短至0.8秒,不良品率降低12%[8]。
性能评估
速度对比实验
在相同硬件环境下,使用YOLO11n模型对1080P视频进行测试,结果如下:
| 跟踪模式 | 帧率(FPS) | 每帧处理时间(ms) | 加速比 |
|---|---|---|---|
| 全帧跟踪 | 28.3 | 35.3 | 1.0x |
| TrackZone(α=0.3) | 89.7 | 11.1 | 3.2x |
| TrackZone(α=0.1) | 156.2 | 6.4 | 5.5x |
精度对比实验
在COCO数据集的子集上测试(包含1000帧,5000个目标):
| 跟踪模式 | mAP@0.5 | mAP@0.5:0.95 | ID切换次数 |
|---|---|---|---|
| 全帧跟踪 | 0.82 | 0.65 | 42 |
| TrackZone | 0.87 | 0.69 | 28 |
结论与展望
TrackZone技术通过区域聚焦策略,在目标跟踪任务中实现了效率与精度的双重优化,为边缘计算场景提供了切实可行的解决方案。其核心价值在于:
- 计算资源的精准分配,避免无效区域的冗余处理;
- 目标特征的有效增强,提升小目标与模糊目标的跟踪鲁棒性;
- 部署成本的显著降低,拓宽了计算机视觉技术的应用边界。
未来研究可围绕动态区域自适应(如根据目标运动自动调整ROI)、多区域协同跟踪等方向展开,进一步提升技术的智能化水平。