基于 LQG 控制的轨迹跟踪 —— 从原理到实践
1. 引言
在现代控制理论中,如何在系统存在噪声和不确定性的情况下实现稳定控制,是工程界普遍面临的问题。经典的 LQR(线性二次型调节器) 能为确定性系统提供最优状态反馈控制,但在状态无法完全观测、传感器存在测量噪声时,单纯依赖 LQR 便难以保证性能。
此时,LQG(Linear Quadratic Gaussian)控制器应运而生,它将 LQR 控制器 与 卡尔曼滤波器结合,能够在噪声环境中实现对系统的高精度最优控制。
2. LQG 控制的基本思想
LQG 控制的框架非常清晰:
- LQR 部分:解决“给定状态下,如何施加控制输入最优”的问题。
- 卡尔曼滤波部分:解决“如何从带噪测量中恢复真实状态”的问题。
最终,LQG 控制器的作用就是:
在噪声存在时,依然能通过状态估计 + 最优控制,实现系统稳定、能耗平衡的控制效果。
3. 系统建模
考虑一个典型的离散线性系统: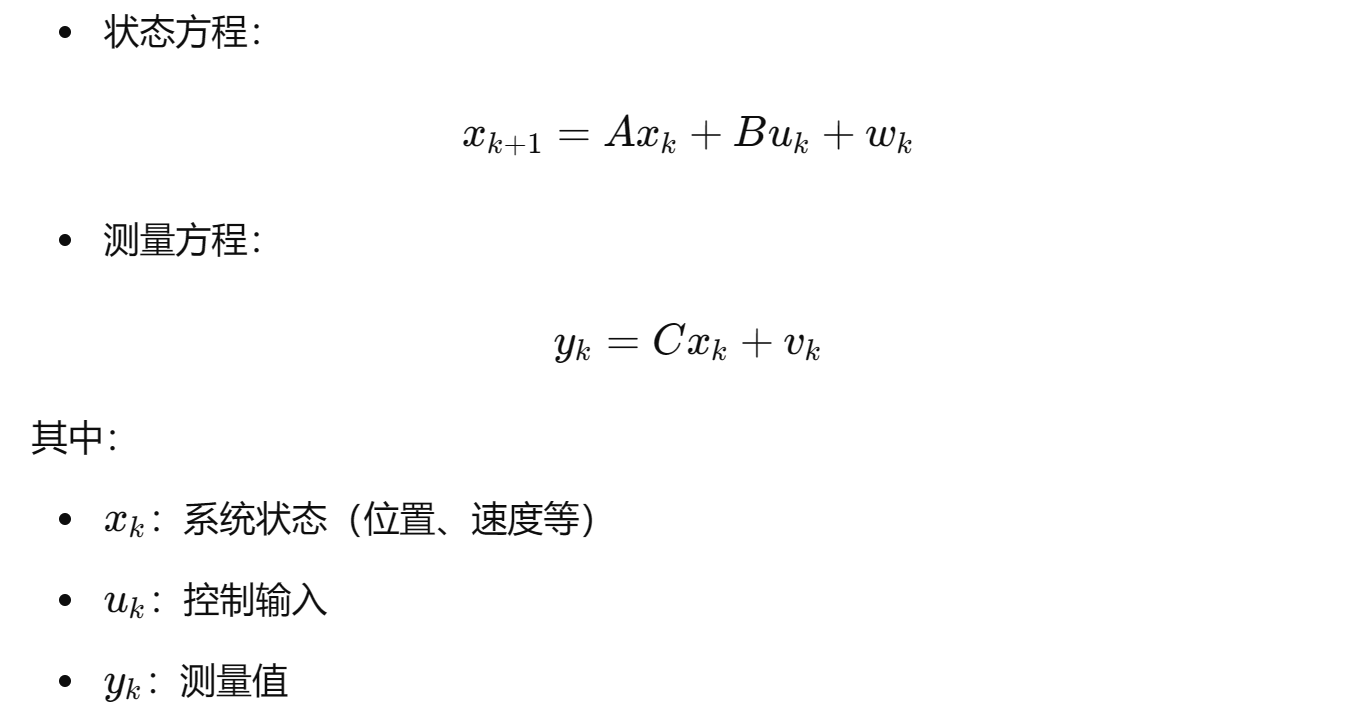

4. LQR 控制器
LQR(Linear Quadratic Regulator,线性二次型调节器) 是现代控制理论中最经典的 最优控制方法 之一。它的目标是:
在满足系统动力学约束的前提下,找到一个最优反馈控制律,使得系统稳定的同时,兼顾控制性能和能量消耗。
换句话说,LQR 不仅追求“误差要小”,还希望“控制输入不要太激烈”,在精度与能耗之间找到最佳平衡点。
LQR 的目标是在状态反馈下找到一个控制律:
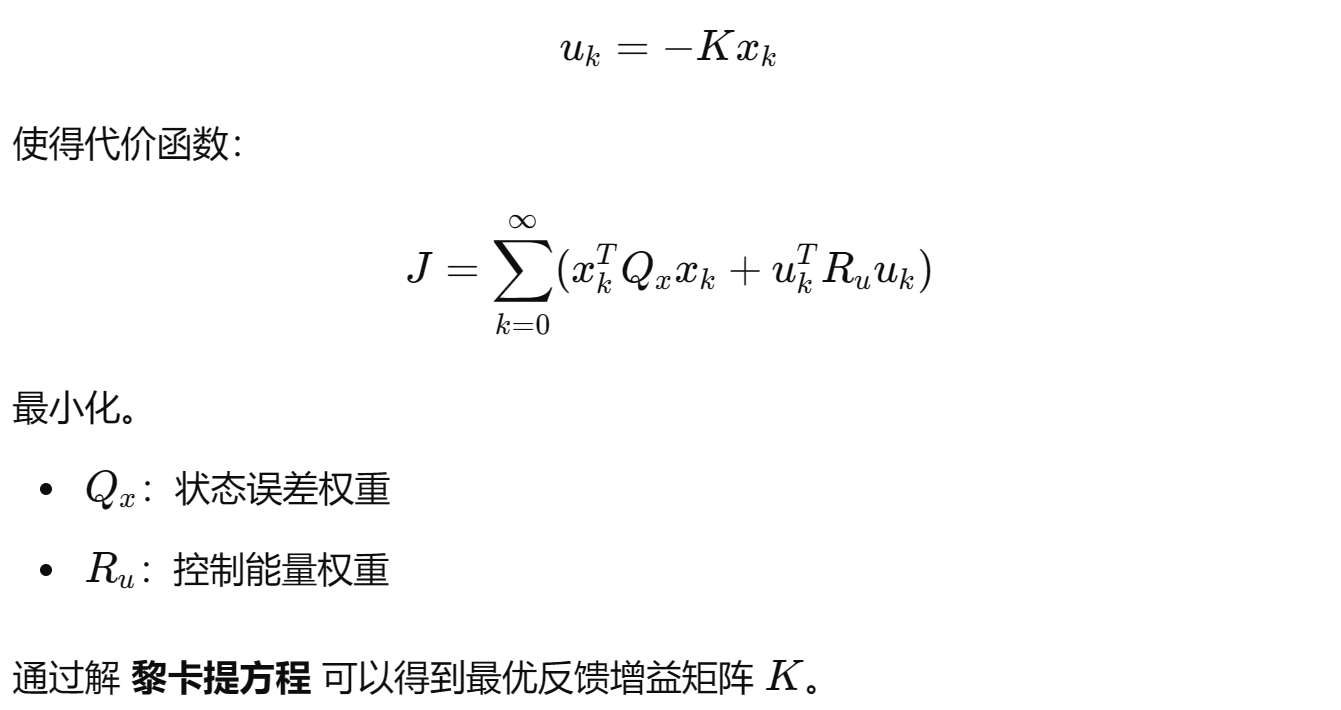
调参含义:
- 增大 Q:系统更重视精度(快速回到目标)
- 增大 R:系统更重视能耗(减少控制动作)
5. 卡尔曼滤波器
尔曼滤波(Kalman Filter, KF) 是一种在噪声环境下对动态系统状态进行最优估计的算法。
它的目标是:
在系统模型和测量值都不完美的情况下,融合二者的信息,得到最接近真实状态的估计值,并且在均方误差意义下最优。
换句话说,卡尔曼滤波器就是一个智能加权平均器:既不完全相信预测,也不完全相信测量,而是动态决定该信谁更多。
在实际中,xk不可直接获得,只能通过测量 yk 间接获取。
卡尔曼滤波每个时刻分 预测(Prediction) 和 更新(Correction) 两个阶段:
1. 预测(Prediction):
根据系统模型,预测下一时刻状态及误差:

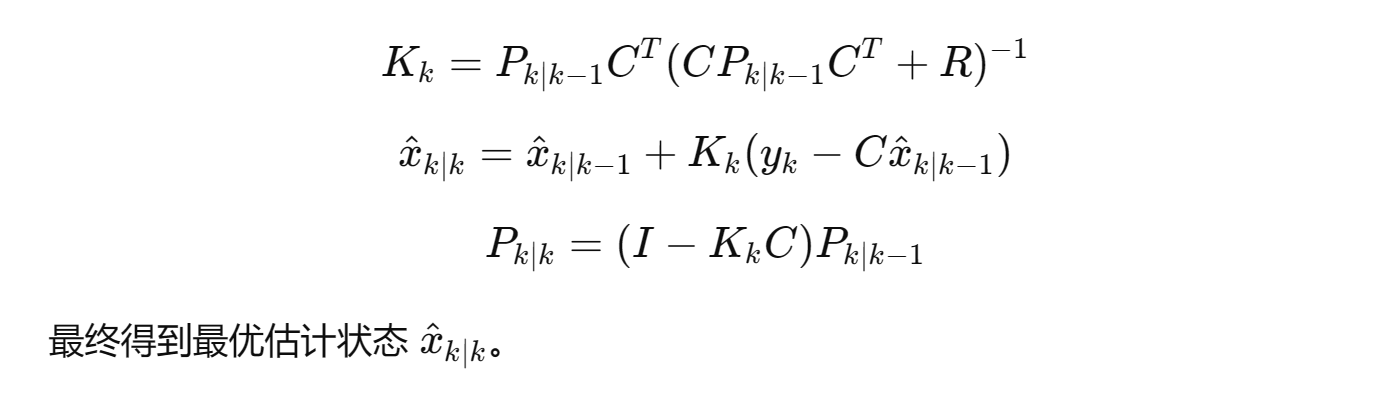
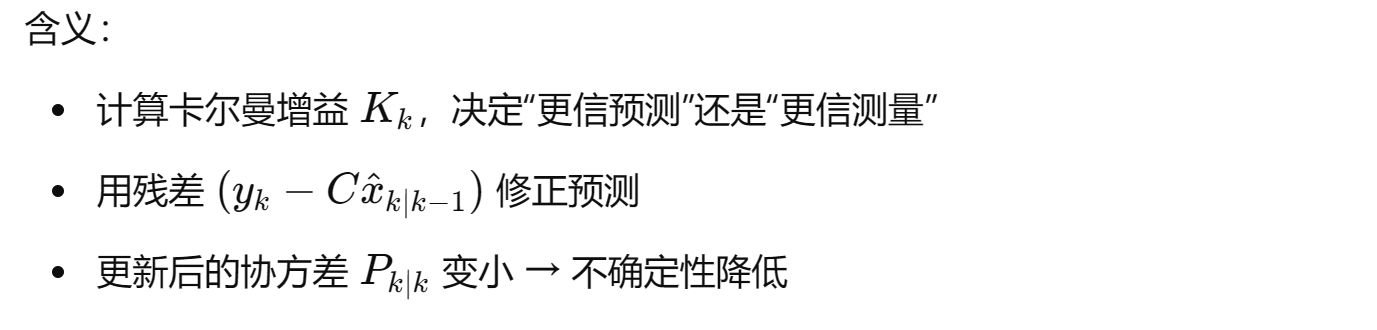
2. 更新(Correction):
利用测量值来修正预测:
6. LQG 控制器结构
LQG 控制器就是 卡尔曼滤波 + LQR 的组合:
- 卡尔曼滤波器提供状态估计x^k
- LQR 根据估计状态计算控制输入:

7. Python 实现示例
下面给出一个基于 Python 的简单 LQG 控制实现框架(双积分小车模型):
import numpy as np
import scipy.linalg# 系统模型
A = np.array([[1, 0, 1, 0],[0, 1, 0, 1],[0, 0, 1, 0],[0, 0, 0, 1]])
B = np.array([[0, 0],[0, 0],[1, 0],[0, 1]])
C = np.eye(4)# 噪声协方差
Q = 0.01 * np.eye(4) # 过程噪声
R = 0.05 * np.eye(4) # 测量噪声# LQR 设计
Qx = np.diag([10, 10, 1, 1])
Ru = np.eye(2)
P = scipy.linalg.solve_discrete_are(A, B, Qx, Ru)
K = np.linalg.inv(B.T @ P @ B + Ru) @ (B.T @ P @ A)# 初始值
x_hat = np.zeros((4,1))
P_cov = np.eye(4)def kalman_filter(y, u, x_hat, P_cov):# 预测x_pred = A @ x_hat + B @ uP_pred = A @ P_cov @ A.T + Q# 更新K_gain = P_pred @ C.T @ np.linalg.inv(C @ P_pred @ C.T + R)x_hat = x_pred + K_gain @ (y - C @ x_pred)P_cov = (np.eye(4) - K_gain @ C) @ P_predreturn x_hat, P_cov# 控制器循环
x = np.array([[0],[0],[0],[0]]) # 真值
for k in range(50):# 假设有测量值y = C @ x + np.random.multivariate_normal([0,0,0,0], R).reshape(-1,1)# 控制输入u = -K @ x_hat# 更新状态x = A @ x + B @ u + np.random.multivariate_normal([0,0,0,0], Q).reshape(-1,1)# 卡尔曼滤波更新x_hat, P_cov = kalman_filter(y, u, x_hat, P_cov)
8. 应用场景
LQG 控制器广泛应用于:
- 无人驾驶车辆轨迹跟踪
- 无人机姿态与航迹控制
- 航天器轨道保持
- 机器人导航
其优势在于:即使在噪声干扰与状态不可完全观测的条件下,依然能够保持稳定、鲁棒的控制性能。
9. 总结
LQG 控制是现代最优控制理论的经典成果。它巧妙地将 LQR 的最优控制 与 卡尔曼滤波的状态估计结合,形成了适用于含噪声系统的闭环最优控制框架。在实际工程中,它既能保证高精度控制,又能在噪声和不确定性下保持系统鲁棒性。
未来进一步的研究方向包括:
- 非线性扩展(EKF-LQR、UKF-LQR)
- 鲁棒控制(H∞ 控制)
- 深度学习与LQG融合