DAY14-新世纪DL(DeepLearning/深度学习)战士:破(优化算法)2
本文参考文章0.0 目录-深度学习第一课《神经网络与深度学习》-Stanford吴恩达教授-CSDN博客
1.mini-batch梯度下降
优化算法是使你的神经网络运行更快,快速训练模型
向量化能让你快速处理m个样本,所以要把训练样本放入向量中,同理对于Y,
在对整个训练集执行梯度下降法时,你要做的是,你必须处理整个训练集,然后才能进行一步梯度下降法,你可以把训练集分割为小一点的子集训练,这些子集被取名为mini-batch,比如说将到
称为
,同理类推,对Y也是同样处理

而miin-batch梯度下降步骤和普通的梯度下降一致,不过对象由X,Y变为,使用batch梯度下降法,一次遍历训练集只能让你做一个梯度下降,使用mini-batch梯度下降法,一次遍历训练集,能让你做多个梯度下降。当然正常来说你想要多次遍历训练集,还需要为另一个while循环设置另一个for循环。所以你可以一直处理遍历训练集,直到最后你能收敛到一个合适的精度。
如果你有一个丢失的训练集,mini-batch梯度下降法比batch梯度下降法运行地更快,所以几乎每个研习深度学习的人在训练巨大的数据集时都会用到
代码:
import numpy as npdef mini_batch_gradient_descent(X, y, learning_rate=0.01, epochs=100, batch_size=32):n_samples, n_features = X.shapetheta = np.zeros(n_features)for _ in range(epochs):indices = np.random.permutation(n_samples)X_shuffled = X[indices]y_shuffled = y[indices]for i in range(0, n_samples, batch_size):X_batch = X_shuffled[i:i+batch_size]y_batch = y_shuffled[i:i+batch_size]gradient = 2/batch_size * X_batch.T.dot(X_batch.dot(theta) - y_batch)theta -= learning_rate * gradientreturn theta
2.理解mini-batch梯度下降
你需要决定的变量之一是mini-batch的大小,m 就是训练集的大小,极端情况下,如果mini-batch的大小等于m ,其实就是batch梯度下降法,每个迭代需要处理大量训练样本,该算法的主要弊端在于特别是在训练样本数量巨大的时候,单次迭代耗时太长。另一个极端情况,假设mini-batch大小为1,就有了新的算法,叫做随机梯度下降法,每个样本都是独立的mini-batch,但是你会失去所有向量化带给你的加速,因为一次性只处理了一个训练样本,这样效率过于低下
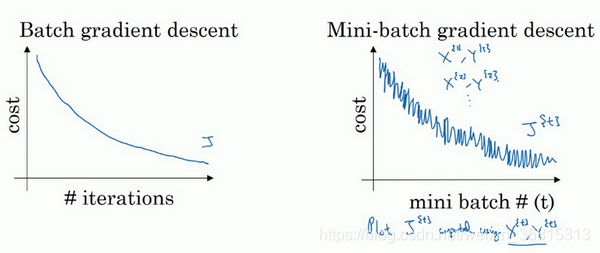
用mini-batch梯度下降法,我们从这里开始,一次迭代这样做,两次,三次,四次,它不会总朝向最小值靠近,但它比随机梯度下降要更持续地靠近最小值的方向,它也不一定在很小的范围内收敛或者波动。如果mini-batch大小既不是1也不是m ,应该取中间值,那应该怎么选择呢?其实是有指导原则的。
首先,如果训练集较小,直接使用batch梯度下降法,样本集较小就没必要使用mini-batch梯度下降法,你可以快速处理整个训练集,所以使用batch梯度下降法也很好,这里的少是说小于2000个样本,这样比较适合使用batch梯度下降法。不然,样本数目较大的话,一般的b大小为64到512,考虑到电脑内存设置和使用的方式,如果mini-batch大小是2的n 次方,代码会运行地快一些
最后需要注意的是在你的mini-batch中,要确保要符合CPU/GPU内存,取决于你的应用方向以及训练集的大小。如果你处理的mini-batch和CPU/GPU内存不相符,不管你用什么方法处理数据,你会注意到算法的表现急转直下变得惨不忍睹
3.指数加权平均
接下来的几个优化算法,比梯度下降快,要理解这些算法,需要用到指数加权平均
给定序列数据和衰减因子
(通常
),指数加权平均值
的计算公式为
,
其中:是当前时刻的加权平均值。
是上一时刻的加权平均值。
控制权重衰减速度(越大,历史数据影响越持久)
4.偏差修正
偏差修正,可以让平均数运算更加准确
当初始阶段(t 较小时),根据指数加权平均,
可能因初始值(如
)而低估真实均值。
此时需要偏差修正:,当t增大时,
,修正效果逐渐消失
较小(如0.1):对近期变化敏感,适合快速适应新趋势。
较大(如0.9):结果更平滑,但可能滞后于真实变化。
在机器学习中,在计算指数加权平均数的大部分时候,大家不在乎执行偏差修正,因为大部分人宁愿熬过初始时期,拿到具有偏差的估测,然后继续计算下去。如果你关心初始时期的偏差,在刚开始计算指数加权移动平均数的时候,偏差修正能帮助你在早期获取更好的估测。
5.动量梯度下降法
动量梯度下降法的运行速度几乎总是快于标准的梯度下降法,简而言之,基本的想法就是计算梯度的指数加权平均数,并利用该梯度更新你的权重。
动量梯度下降法是梯度下降算法的一种改进版本,通过引入动量项加速收敛并减少震荡。其核心思想是模拟物理中的动量概念,即当前更新方向不仅依赖当前梯度,还受历史梯度方向的影响。
更新公式:,
其中:
是当前动量项,
是上一时刻的动量。
是动量系数(常用值为 0.9,可根据任务调整(如 0.8-0.99)),控制历史梯度对当前方向的影响。
是学习率(通常需比普通梯度下降更小,因动量会放大更新幅度)。
是损失函数关于参数
的梯度。
初始化参数:设置初始参数 、学习率
、动量系数
(如 0.9),初始化动量项
。
迭代更新:每次迭代计算当前梯度 ,并更新动量项v和
,
def momentum_gradient_descent(theta, alpha, beta, num_iterations, gradient_function):v = 0for _ in range(num_iterations):grad = gradient_function(theta)v = beta * v + (1 - beta) * gradtheta = theta - alpha * vreturn theta
6.RMSprop
RMSprop算法,全称是root mean square prop算法,它也可以加速梯度下降
RMSprop是一种自适应学习率优化算法。它通过调整每个参数的学习率来加速梯度下降的收敛,特别适合处理非平稳目标函数或稀疏梯度问题。RMSprop 是 AdaGrad 的改进版本,解决了 AdaGrad 学习率单调下降的问题。
核心思想:RMSprop 通过计算梯度平方的指数移动平均来调整学习率。对于频繁更新的参数,其梯度平方的累积值较大,从而降低学习率;对于稀疏更新的参数,累积值较小,学习率相对较高。
初始化参数:
全局学习率
初始参数
衰减率(通常设为 0.9)(控制历史信息的权重,值越大对过去梯度依赖越强。)
小常数(通常为
,防止除以零)
初始累积变量 。
计算梯度
在第t次迭代中,计算当前参数 的梯度
:
初始化梯度平方的指数移动平均
迭代更新:
调整学习率并更新参数
import numpy as npdef rmsprop(params, grads, lr=0.01, rho=0.9, epsilon=1e-8):cache = np.zeros_like(params) # 初始化累积变量cache = rho * cache + (1 - rho) * grads**2updated_params = params - lr * grads / (np.sqrt(cache) + epsilon)return updated_params
7.Adam优化算法
Adam(Adaptive Moment Estimation)是一种结合了动量(Momentum)和RMSProp思想的梯度下降优化算法,适用于大规模数据或参数的场景。它通过计算梯度的一阶矩(均值)和二阶矩(未中心化的方差)的自适应估计,实现对学习率的动态调整。
每个参数有独立的学习率,适合处理稀疏数据。
初期迭代时,和
偏向零,修正后加速初期收敛。
常用于深度学习中的卷积网络、循环网络等。
核心思想:
动量机制:记录梯度的指数加权移动平均值(一阶矩),保留历史梯度方向信息,加速收敛。
自适应学习率:通过梯度的平方的指数加权移动平均(二阶矩)调整参数的学习率,解决稀疏梯度问题。
初始化参数:
初始参数
一阶矩变量 ,二阶矩变量
衰减率 (通常为0.9),
(通常为0.999)
学习率 (默认0.001,可尝试
。)
小常数 (默认保持
,防止除以零)
迭代跟新(对于第t步):
计算当前梯度:
更新一阶矩:
更新二阶矩:
修正一阶矩偏差:
修正二阶矩偏差:
更新参数:
import torch
optimizer = torch.optim.Adam(model.parameters(), lr=0.001, betas=(0.9, 0.999))
8.学习率衰减
学习率衰减(Learning Rate Decay)是优化神经网络训练过程的常用技术,通过逐步降低学习率,帮助模型在训练初期快速收敛,后期稳定精细调整。合理的学习率衰减策略能避免振荡、提升泛化能力。
这里举例指数衰减(其他的衰减可以找其他文章详细学习,本文仅提一嘴)
学习率按指数函数连续衰减,适用于需要平滑调整的场景。
公式:(
γ 为衰减率(通常接近 1,如 0.95))
9.局部最优问题
局部最优问题指在优化过程中,算法收敛到一个局部最优解而非全局最优解。该解在邻近区域内是最优的,但在整个解空间中可能存在更优的解。这种现象常见于非凸优化、梯度下降算法或启发式搜索中。
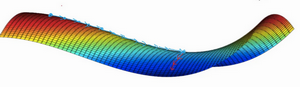
我们从深度学习历史中学到的一课就是,我们对低维度空间的大部分直觉,比如你可以画出上面的图,并不能应用到高维度空间中。适用于其它算法,因为如果你有2万个参数,那么 J 函数有2万个维度向量,你更可能遇到鞍点,而不是局部最优点。
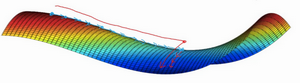
如果局部最优不是问题,那么问题是什么?结果是平稳段会减缓学习,平稳段是一块区域,其中导数长时间接近于0,如果你在此处,梯度会从曲面从从上向下下降,因为梯度等于或接近0,曲面很平坦,你得花上很长时间慢慢抵达平稳段的这个点,因为左边或右边的随机扰动
我们可以沿着这段长坡走,直到这里,然后走出平稳段。
首先,你不太可能困在极差的局部最优中,条件是你在训练较大的神经网络,存在大量参数,并且成本函数 J 被定义在较高的维度空间。
第二点,平稳段是一个问题,这样使得学习十分缓慢,这也是像Momentum或是RMSprop,Adam这样的算法,能够加速学习算法的地方。在这些情况下,更成熟的优化算法,如Adam算法,能够加快速度,让你尽早往下走出平稳段。
10.习题参考
2.11 总结-深度学习第二课《改善深层神经网络》-Stanford吴恩达教授_batch的大小通常不是1也不是m,而是介于两者之间?-CSDN博客