人工智能统一信息结构的挑战与前景
摘要与引言
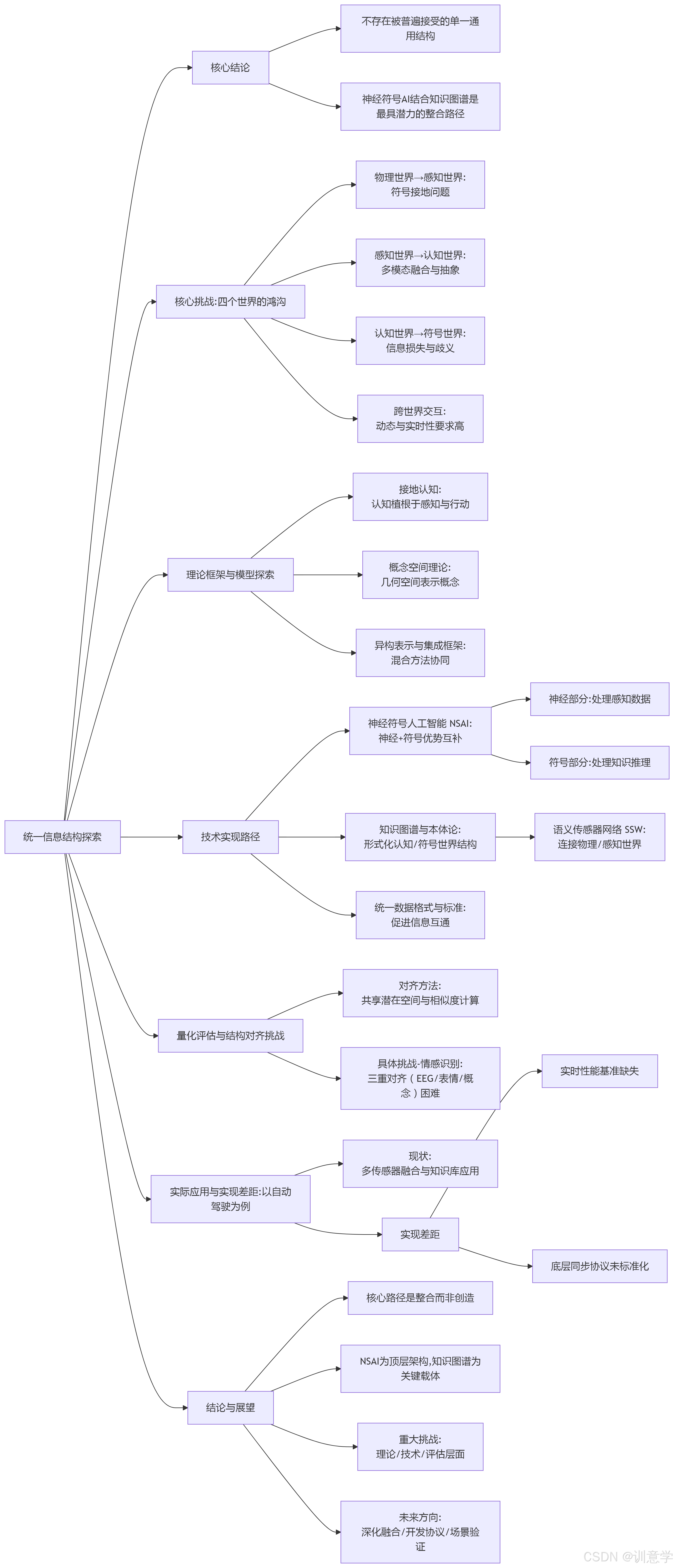
本报告旨在深入探讨一个人工智能与认知科学领域的核心问题:在知识表示与推理中,是否存在一个统一的、共享的、普遍适用的通用信息结构,能够作为以下四个世界的基础:① 物理世界(如传感器捕获的原始数据),② 人的感知世界(涉及视觉、听觉、触觉等多模态信息的符号落地),③ 人的认知世界(涵盖本体论、概念、情绪、观念等抽象知识),以及④ 人的符号世界(如语言和文字系统)。
通过对现有研究文献的系统性分析,本报告的核心结论是:截至目前,尚不存在一个被学术界和工业界普遍接受的、能够完全统一这四个世界的单一、通用信息结构。 然而,研究表明,多个理论框架和技术路径正在朝着这个宏伟目标迈进,并已在不同层面取得了显著进展。其中, 神经符号人工智能(Neuro-Symbolic AI) 结合 知识图谱(Knowledge Graphs) 的范式,被认为是最具潜力的整合路径。它试图利用神经网络处理复杂的感知数据,并将其与符号系统进行连接,以实现更高级的认知推理。
本报告将系统梳理相关的理论基础,剖析主流的技术实现路径,探讨在量化评估与结构对齐方面面临的挑战,并审视在自动驾驶等前沿领域的实际应用差距,最终对未来的发展方向进行展望。
一、 核心挑战:四个世界之间的鸿沟
连接物理、感知、认知和符号这四个世界,本质上是试图解决人工智能领域一些最根本的难题。每个世界都有其独特的信息形态和处理逻辑,它们之间的“鸿沟”构成了统一信息结构的主要障碍。
物理世界到感知世界: 这是从连续、高维的物理信号(如光波、声波)到离散、结构化的感知信息的转换。挑战在于如何从海量的原始传感器数据中提取有意义的特征,并将其与人类的感知经验对齐。这一过程即是著名的 “符号接地问题”(Symbol Grounding Problem) ,即符号(如单词“苹果”)如何获得其在真实世界对应物(一个真实的苹果及其视觉、味觉、触觉属性)上的意义。
感知世界到认知世界: 这是从具体的多模态感知输入(看到红色、圆形,闻到果香)到抽象概念(形成“苹果”这个概念)的跃升。这不仅涉及多模态信息的融合 还需要形成本体论、知识体系和进行抽象推理。例如,如何将EEG信号和面部表情这些感知输入,与“快乐”这一复杂的认知与情绪概念关联起来 是该领域的一大难题。
认知世界到符号世界: 这是将内在的、复杂的认知概念(如“正义”、“爱”)用有限的、离散的语言或文字符号(④)进行精确表达和交流的过程。符号系统本质上是对认知世界的一种简化和编码,这种转换不可避免地会带来信息的损失或歧义。
跨世界的动态与实时性: 在现实应用中(如自动驾驶),这四个世界的交互是实时动态的。系统必须在毫秒级的时间尺度上完成从传感器数据流到语义理解和决策的端到端映射 。这对信息结构的计算效率和数据同步机制提出了极高的要求。
二、 理论框架与模型探索:寻求统一的基石
尽管单一的统一理论尚未出现,但多个理论框架为我们提供了构建桥梁的思路,试图从不同角度连接上述世界。
2.1 接地认知(Grounded Cognition)
接地认知理论主张,认知(③)并非独立于身体的抽象符号处理过程,而是深深植根于感知(②)、行动和物理世界(①)的经验之中 。该理论认为,当我们理解一个概念(如“踢”)时,大脑中被激活的神经回路与我们实际执行“踢”这个动作时所激活的回路是部分重叠的。这为连接感知输入和认知概念提供了一个强有力的生物学和心理学基础,强调了多模态感知信息在形成抽象知识中的核心作用。
2.2 概念空间(Conceptual Spaces)
由Peter Gärdenfors提出的概念空间理论,为连接符号世界(④)和感知世界(②)提供了一个中间层 。该理论提出,概念可以在一个由多个“质量维度”(如颜色、形状、大小)构成的几何空间中进行表示。例如,“苹果”这个概念可以被表示为色调空间、形状空间和口味空间中的一个区域。这种几何化的表示方法,使其能够自然地处理原型、相似性和概念组合等问题,为符号和子符号(感知数据)之间建立了一座桥梁。
2.3 异构表示与集成框架
有研究者认识到,单一的表示方法可能不足以应对复杂世界的挑战 。因此,集成的、异构的表示框架应运而生。例如,“异构代理体”(Heterogeneous Proxytypes)框架认为,一个概念可以由多种不同类型的表示(如符号逻辑、概念空间、神经网络等)共同定义 。同样,有框架提出在感知和符号表示之间引入一个“概念层面”作为中介 ,这与概念空间理论的思想不谋而合。这种混合方法承认了不同信息形态的独特性,并致力于将它们协同工作,而非强行统一。
三、 技术实现路径:迈向整合的实践
在理论的指引下,人工智能领域发展出了多种技术路径,试图在工程上实现四个世界的连接。
3.1 神经符号人工智能 (Neuro-Symbolic AI, NSAI)
NSAI是当前最被看好的整合范式 。它旨在结合神经网络(神经部分)和符号逻辑(符号部分)的优势:
- 神经部分: 以深度学习模型(如CNN、Transformer)为代表,擅长处理来自物理和感知世界(①、②)的原始、高维、嘈杂的数据,如图像、声音和传感器读数 。它们通过学习,将这些数据映射到低维的、有意义的特征向量或嵌入(embeddings)。
- 符号部分: 以逻辑推理、知识图谱、本体论为代表,擅长处理来自认知和符号世界(③、④)的结构化知识,进行严谨的推理、解释和规划 。
NSAI的核心思想是构建一个能够连接这两部分的架构 。例如,一个神经符号系统可以先用神经网络从摄像头图像中检测出“人”、“车”和“红绿灯”,然后将这些识别出的符号输入到逻辑推理引擎中,结合交通规则(以符号形式存储的知识)来做出“停车等待”的决策。这种架构天然地跨越了感知(识别物体)和认知/符号(应用规则)的鸿沟。
3.2 知识图谱 (Knowledge Graphs) 与本体论 (Ontologies)
知识图谱和本体论为认知世界(③)和符号世界(④)提供了一种形式化的、机器可读的结构 。
- 本体论作为共享的知识表示框架,定义了特定领域内的概念、属性及其相互关系,可以被视为AI系统的“通用语言” 。
- 知识图谱是本体论的具体实例,它以图(Graph)的数据结构将实体(节点)通过关系(边)连接起来,形成了庞大的语义网络 。
为了连接物理/感知世界, 语义传感器网络(Semantic Sensor Web, SSW) 的概念被提出,旨在通过语义元数据来标注传感器数据(①),使其具备情境知识并增强互操作性 。例如,一个温度传感器的读数“25”,可以被标注为{sensor_id: "T1", value: 25, unit: "Celsius", location: "Room101", timestamp: "..."},这些标注后的数据可以更容易地被整合到知识图谱中,实现从原始数据到语义知识的转换 。在自动驾驶等领域,研究者正探索利用时空图数据库(如Neo4j)来实时构建这种包含时间和空间维度的知识图谱 。
3.3 统一数据格式与标准
标准化的数据格式是实现信息互通的基础。数据集描述语言(DSDL) 等框架的目标就是提供一个统一的标准,用来描述不同模态和结构的数据,以促进AI数据的流通和整合 。语义网技术(如RDF、OWL)和链接数据(Linked Data)原则也为在网络规模上发布和连接结构化数据提供了基础 。
四、 量化评估与结构对齐的挑战
要证明一个信息结构是“统一”的,就必须能够量化评估不同世界表示之间的对齐程度。这是一个巨大的挑战,目前的研究主要集中在特定模态对之间。
- 对齐方法: 研究人员常使用降维技术将不同模态的数据(如图像和文本)映射到同一个共享的潜在空间(latent space),然后通过计算向量间的余弦相似度或欧几里得距离来衡量它们的对齐程度 。例如,一张狗的图片经过编码器后得到的向量,应该与单词“dog”的词向量在该空间中非常接近。
- 具体案例的挑战——情感识别: 情感是一个横跨感知(②,如面部表情、EEG信号)和认知(③,如内在感受、情绪概念)的复杂现象。研究显示,融合EEG和面部表情可以提高情感识别的准确率 。然而,要在一个统一的神经符号潜在空间中,同时对齐 EEG特征向量、面部表情嵌入 以及 “悲伤”这个符号化情感概念的坐标,并提供可信的量化证据(如余弦相似度矩阵),仍然是一个开放的研究问题。现有的搜索结果中,并未找到明确展示这种“三重对齐”并提供同行评审的量化指标的研究 。这凸显了在认知层面进行量化对齐的极端困难性。
五、 实际应用与实现差距:以自动驾驶为例
自动驾驶系统是检验统一信息结构有效性的绝佳试金石,因为它必须实时地处理和整合所有四个世界的信息。
现状: 自动驾驶系统广泛使用多传感器融合技术(①→②)来构建对周围环境的感知模型 。同时,利用知识库和本体论(③、④)来进行场景理解和决策推理也成为研究热点 。例如,系统可以构建一个动态场景图,表示车辆、行人、道路之间的时空关系 。
实现差距:
- 实时性能基准的缺失: 尽管学术界提出了使用图数据库(如Neo4j, Amazon Neptune)来构建实时知识图谱的设想 但搜索结果中并未找到由工业界实际部署的系统发布的、关于“从传感器流到语义知识图谱的实时边缘创建速率(edges per second)”等关键性能基准的公开数据 。这表明,将海量、高速的传感器数据实时转换为结构化语义知识的端到端、可扩展方案,在工程上仍面临巨大挑战。
- 底层同步协议的黑盒: 在NSAI框架中,神经网络特征提取层(感知)和符号推理层(认知)之间的高效数据交换至关重要。要实现毫秒级甚至纳秒级的同步,需要精密的时钟同步机制(如 PTP/IEEE 1588协议 )和高效的消息队列协议 。然而,搜索结果中没有任何公开的技术标准或架构设计文档,详细说明在主流的NSAI框架中,这种毫秒级/纳秒级同步是如何具体实现的 。这表明该领域的底层实现细节尚未标准化,仍处于各个研究团队或公司的内部探索阶段。
六、 结论与展望
综合本报告的研究分析,我们可以得出以下结论:
不存在现成的统一结构: 目前,没有任何单一、公认的通用信息结构能够无缝统一物理、感知、认知和符号这四个世界。这是一个仍在探索中的前沿科学问题。
整合是核心路径: 最有希望的方向并非寻求一个全新的“原子”结构,而是通过整合现有范式来构建桥梁。神经符号人工智能(NSAI) 提供了一个极具潜力的顶层架构,它利用神经网络的感知能力和符号系统的推理能力,天然地跨越了感知与认知之间的鸿沟。
知识图谱是关键载体: 在NSAI架构中,知识图谱(尤其是时空知识图谱)及其底层的图数据库技术,是承载和组织来自认知和符号世界知识、并与感知信息进行关联的关键数据结构。
重大挑战依然存在:
- 理论层面: “符号接地”问题仍未被根本解决。
- 技术层面: 如何在保证高吞吐量和低延迟的前提下,实现从海量非结构化传感器数据到结构化知识图谱的实时、可扩展转换,是工程上的核心瓶颈。
- 评估层面: 建立一套能够跨越四个世界的、可信的、多维度的量化评估体系,特别是涉及抽象认知概念的对齐,依然极其困难。
展望未来,实现这一宏伟目标的路径可能在于进一步深化神经符号架构的融合机制,开发更为高效和标准化的数据交换与同步协议,并在自动驾驶、具身智能机器人等复杂场景中进行持续的迭代验证。这场对通用信息结构的探索,将继续推动人工智能从感知智能向认知智能的深刻变革。