旋转磁体产生的场-对导航姿态的影响
pitch、yaw、roll是描述物体在空间中旋转的术语,通常用于计算机图形学或航空航天领域中。这些术语描述了物体绕不同轴旋转的方式:
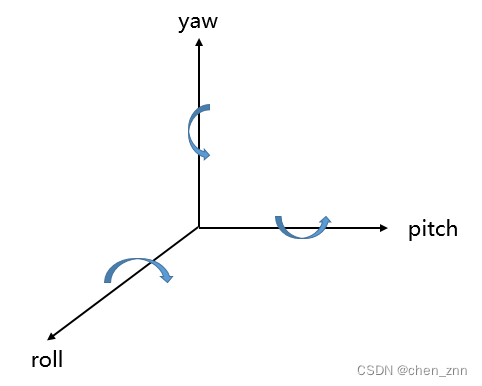
Pitch(俯仰):绕横轴旋转,使物体向前或向后倾斜。俯仰角度通常用来描述物体绕其横轴的旋转。
Yaw(偏航):绕垂直轴旋转,使物体左右转动。偏航角度通常用来描述物体绕其垂直轴的旋转。
Roll(翻滚):绕纵轴旋转,使物体沿水平面滚动。翻滚角度通常用来描述物体绕其纵轴的旋转。
旋转磁体产生的场对于导航姿态的影响
这个实验并不需要太细的讲解。大体说一下即可。
仍然是先前提到的九轴传感器,三轴加速度测重力,三轴磁场测磁场强度和方向,三轴陀螺仪,测转动的方向,或者说当前传感器的姿态。六个图像,右上图为转速图像,右下图为实时录像。中上图为姿态的Pitch Yaw Roll,中下为磁场强度的三轴和两个球面角度。
左上没有使用,左下为磁场的当前三轴数值,球面角的数值和强度数值,以及当前方向示意图。
在PYR姿态图中,从上到下三条线分别为Roll Pitch Yaw 。实验设备中Pitch和Roll都在水平面上,Yaw在垂直水平面的方向上。
整个实验过程中Roll和Pitch基本上不变,也就是没有发生俯仰和翻滚,但是发生了偏航。
刚启动磁体转动的时候,发生了负向的也就是向右偏航。随着转速增大逐渐向左偏航。
转速匀速增加,偏航角度也逐渐增加后来便不随着速度增加而基本保持一个固定的角度。
当转速急剧下降,偏航角度继续保持,但过了一段时间之后也立即向右回转。
这说明效果具有后滞性。
分析起来,可以认为,最开始转速极低的时候,磁场和空间几乎是同一种东西,所以开始转动的时候磁场就像空间一样拖拽了检测装置,使其产生向右的偏航。但是随着转速增加,旋转磁体产生的场构成的这个空间就越来越自成一体,它就从拉扯时空变成了独立时空,而周围的检测设备就在这个独立时空的边缘,其偏航角度和这个独立时空的密度等高线相切(或垂直,具体看设备的相对位置)。所以即便匀速增加转速,也并不使得偏航角继续增大。后来突然减速,这个场域也并不立即消失,而是持续了一段时间之后突然塌缩,偏航角就立即回到了正常状态。
从数据变化大体上可以看出,旋转磁体产生的场是具有改变局部时空的能力的。
由于这里同样显示了磁场的变化,但两者图线并不相关,说明哪怕测量偏航角的陀螺仪是铁磁性物质,也并不影响实验的结果,也就是说,这个现象不是通常认为的磁场效应造成的。