LabVIEW模糊逻辑控制车辆停靠
LabVIEW模糊逻辑控制车辆停靠
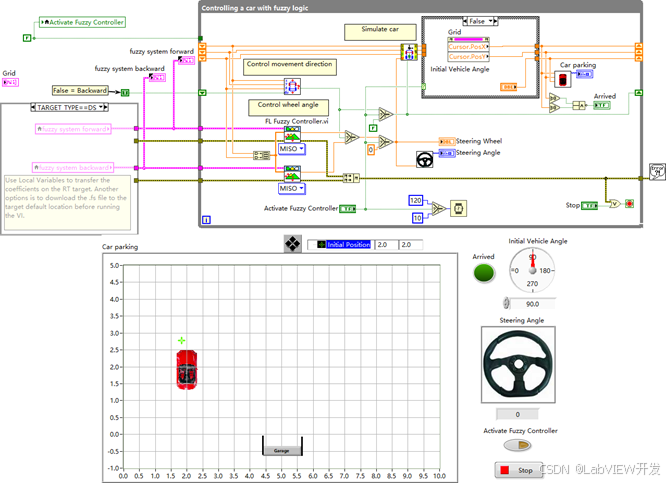
基于 LabVIEW 平台,借助其图形化编程优势实现模糊逻辑车辆停靠控制。核心是通过 LabVIEW 的模糊逻辑工具箱及自定义 VI(如 FL Fuzzy Controller.vi 等),接收车辆位置等输入信号,经处理后输出转向角度等控制量,可视化呈现车辆停靠全过程。
各 VI 及模块说明
1. FL Fuzzy Controller.vi
- 功能:作为系统核心控制模块,在 LabVIEW 环境下实现模糊逻辑控制流程,接收车辆位置 (vehicle-position) 等输入变量,通过 LabVIEW 模糊逻辑工具箱完成模糊化、规则推理和去模糊化,输出转向角度 (steering-angle) 控制量。
- 使用场合:适用于 LabVIEW 开发的车辆自动停靠、低速路径规划等项目,尤其适合需要快速搭建控制原型并进行可视化调试的场景。
- 特点:充分利用 LabVIEW 图形化编程优势,控制逻辑直观可见;可通过前面板实时调整隶属函数参数和规则库;与 LabVIEW 数据采集模块无缝衔接,便于后期与硬件结合。
- 注意事项:需确保输入信号在 LabVIEW 中的数据类型匹配;模糊规则编辑时注意避免 LabVIEW 模糊工具箱的语法限制;复杂控制场景下需优化程序框图以避免运行效率下降。
- 对比类似功能:相较于 MATLAB/Simulink 实现的模糊控制器,LabVIEW 版本更适合需要硬件集成和实时控制的场景;但在复杂规则优化和数学分析功能上稍逊,不过通过 LabVIEW 与 MATLAB 的接口可互补。
2. Simulate car.vi
- 功能:在 LabVIEW 中构建车辆运动仿真模型,根据控制指令实时计算并在前面板动态显示车辆位置和姿态变化,支持参数化设置车辆初始状态。
- 使用场合:用于 LabVIEW 开发环境下的车辆控制算法初步验证,可配合 LabVIEW 的波形图表等控件进行仿真结果分析。
- 特点:依托 LabVIEW 的图形化仿真能力,车辆运动状态可视化程度高;支持与 LabVIEW 其他控制模块快速连线集成;可通过属性节点自定义仿真界面。
- 注意事项:仿真步长设置需与 LabVIEW 程序循环速率匹配;复杂仿真场景下需合理使用 LabVIEW 的并行循环结构以提高效率;避免前面板控件过多导致刷新延迟。
- 对比类似功能:相比 LabVIEW 中的 Stateflow 模块实现的状态仿真,该 VI 更专注于车辆运动学模拟,功能更专一;与第三方仿真软件相比,优势在于能与 LabVIEW 控制逻辑无缝集成。
3. Control movement direction.vi
- 功能:在 LabVIEW 环境中解析模糊控制输出信号,判定车辆前进 / 后退状态,生成方向控制指令并发送至仿真模块,支持通过前面板指示灯实时显示当前方向状态。
- 使用场合:用于 LabVIEW 开发的车辆运动控制系统中方向切换逻辑实现,是连接模糊控制与车辆执行机构的中间环节。
- 特点:利用 LabVIEW 的布尔逻辑和枚举类型简化方向判断逻辑;支持与 DAQmx 模块直接交互,便于控制实际硬件;前面板设计直观,便于调试。
- 注意事项:需处理好 LabVIEW 程序中的数据流向,避免方向指令与转向指令冲突;在实时控制中需设置适当的延迟以匹配硬件响应速度;注意信号类型转换时的精度损失。
- 对比类似功能:相较于使用 LabVIEW 状态机结构实现的复杂运动控制,该 VI 逻辑更简单,专注于方向控制;与 PLC 实现的方向控制相比,LabVIEW 版本更便于与上层模糊控制算法集成和调试。
背景补充
LabVIEW 作为图形化编程环境,在测控领域应用广泛。该系统利用 LabVIEW 的优势,将模糊逻辑这一适合处理不确定性问题的控制方法应用于车辆停靠场景,降低了控制算法的实现门槛。通过 LabVIEW 的模块化设计,各 VI 可独立调试又能快速集成,为自动泊车等功能的开发提供了便捷的验证平台。实际应用中,可通过 LabVIEW 的实时模块将该系统部署到嵌入式硬件,实现从仿真到实际控制的无缝过渡。