GPS信号捕获尝试(上)
一、GPS定位
从我的手机OPPO Reno8提供的定位信息来看,大概率用的还是美国的GPS,而非中国的北斗卫星定位。但凡用了北斗肯定会强调的:
经纬度获取:

定位结果:
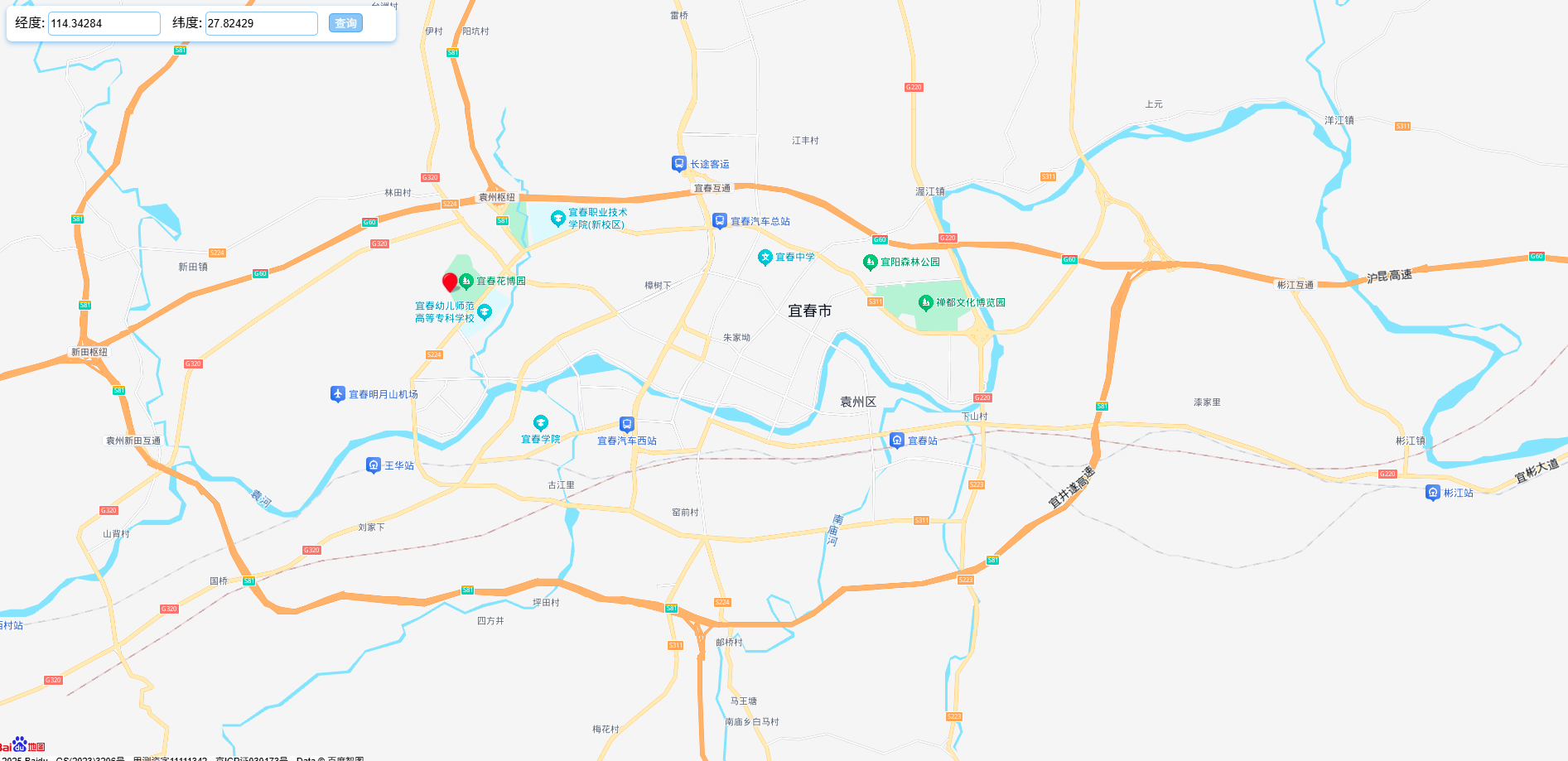
这个位置离我家有了5公里
经纬度刷新:

更新定位结果:
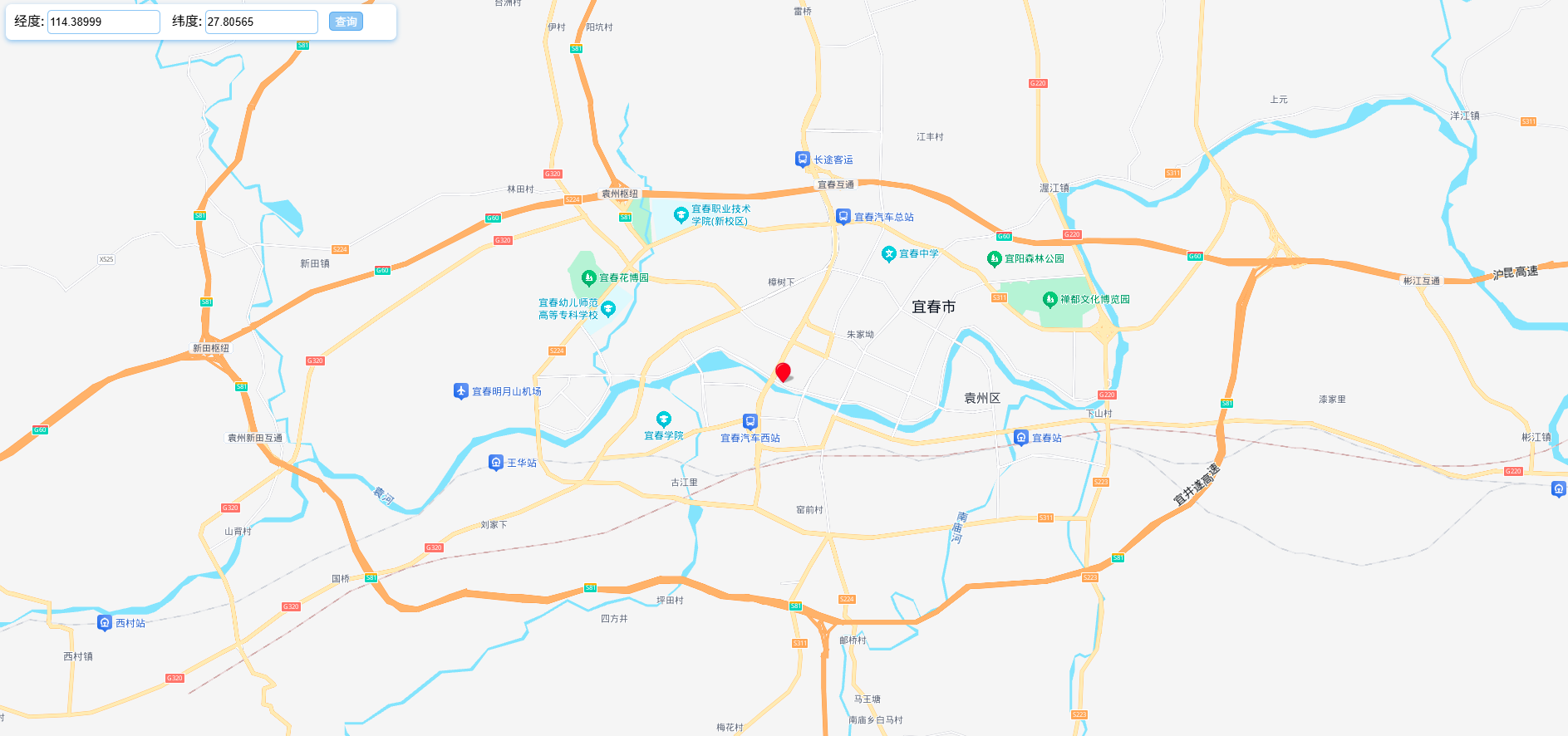
我家实际是在这一块:

误差达到了1公里
可能是因为我的手机在房间室内的原因。
二、GPS信号捕获前期准备
2.1 6G频段
5G通信包括主流频段Sub-6 GHz(中低频)和毫米波频段(24-100 GHz),现在的卫星通信还是在5G频段。
未来6G通信技术将扩展至太赫兹(THz,100 GHz~10 THz)频段。
过去的一些经典频段:
高频短波频段
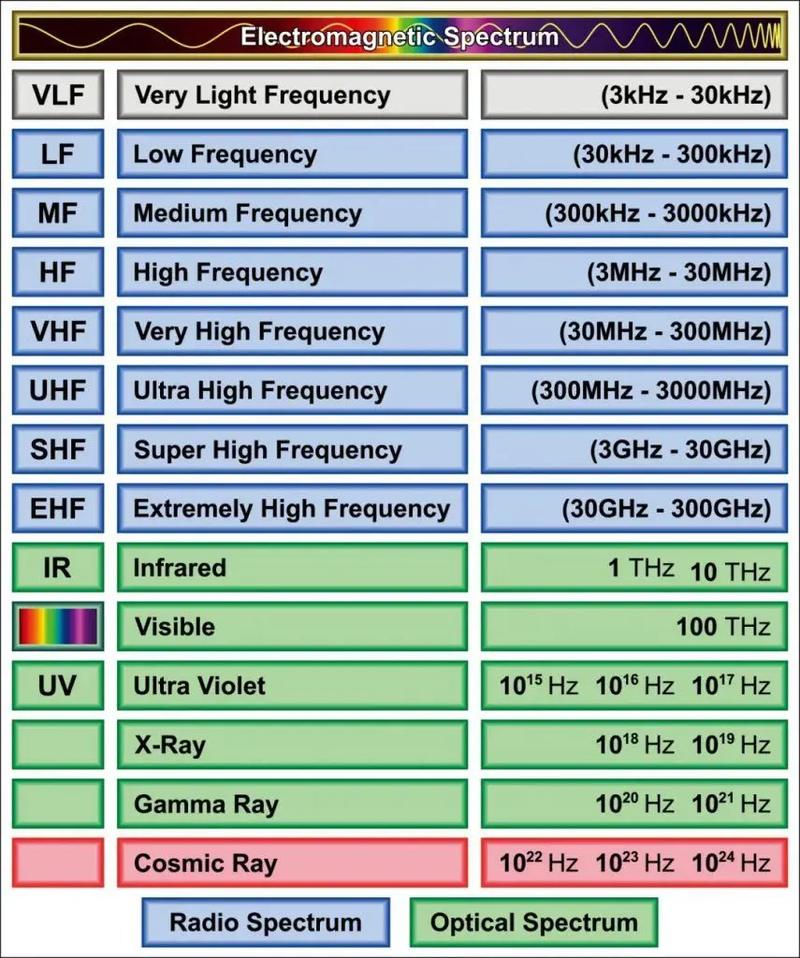
太赫兹频段是无线电频段最后的净土了,可视光之下最后的频段。
2.2 L频段
GPS信号使用的是L频段,包括L1频段(1575.42 MHz),L2频段(1227.60 MHz)和L5频段(1176.45 MHz)。
为什么不用L3和L4呢,L3被划给核爆探测系统使用了,因为L4被划分给5G和卫星通信用了。
| 频段 | 中心频率 | 主要信号 | 用途 |
|---|---|---|---|
| L1 | 1575.42 MHz | L1 C/A(民用)、L1 P(Y)(军用退役中)、 L1C(新一代民用)、L1M(军用) | 基础定位、高精度民用、军用加密 |
| L2 | 1227.60 MHz | L2 P(Y)(军用退役中)、 L2C(民用)、L2M(军用) | 电离层误差校正、高精度定位、军用 |
| L5 | 1176.45 MHz | L5(民用生命安全) | 航空安全、高可靠性应用、三频高精度 |
2.3 GPS信号调制方式
GPS信号主要采用二进制相移键控(BPSK)及其衍生形式(如BOC) 的调制方式。