《基于雅可比矢量近似的EIT触觉传感灵敏度非均匀校正》论文解读
该文章提出了一种基于雅可比向量校正(JVC)的方法,旨在解决电阻抗断层成像(EIT)触觉传感器灵敏度分布不均匀的问题,这种不均匀性导致不同位置的力校准和测量不可靠;JVC 方法通过构建基于系统雅可比矩阵的定制缩放向量来校正空间灵敏度,实现整个传感区域的近似均匀灵敏度,且无需大量校准数据;通过有限元法(FEM)模拟、幻影实验(使用不同电导率的测试对象)以及在基于多孔聚合物和离子液体结构的 EIT 传感器原型上的测试,验证了该方法的有效性,结果显示在直径 10cm 的圆形触觉传感器上,0 至 4N 的触摸力预测准确且一致,为 EIT 基大面积触觉传感器在人机交互场景中的应用提供了重要进展。
目录
一、研究背景与问题:为何聚焦 EIT 触觉传感器灵敏度问题?
二、JVC 方法:如何让 EIT 传感器 “一视同仁” 地感知触摸?
2.1 先理解问题:EIT 传感器的 “偏心” 毛病
2.2 JVC 方法的整体思路
2.3 关键步骤 1:生成 “反向校正向量”
2.4 关键步骤 2:锁定 “有效触摸区域(ROI)”
2.5 关键步骤 3:修正信号,实现 “一视同仁”
三、实验验证:从模拟到实物,JVC 方法真的有效吗?
3.1 幻影实验(模拟测试):用 “水和物体” 模拟触摸,看校正效果
3.2 触觉传感器实验(实物测试):用 “真实传感器” 测触摸力,看精度
结论:JVC 方法真的有效!
四,总结
一、研究背景与问题:为何聚焦 EIT 触觉传感器灵敏度问题?
在机器人与人类的物理交互中,大面积触觉传感器扮演着关键角色 —— 它能让机器人 “感知” 触摸的位置、力度,从而实现安全抓取、轻柔操作等精细动作。传统的阵列式触觉传感器由大量微小传感单元组成,虽能实现分布式感知,但存在成本高、布线复杂、数据传输繁琐等问题,难以满足大规模应用需求。
电阻抗断层成像(EIT)技术的出现为解决这一问题提供了新思路。EIT-based 触觉传感器无需内部布线,仅通过边界电极的电压测量,就能 “重建” 传感区域内的电导率分布,实现 “一体化” 大面积感知。这种特性让它成为低成本、易制造的理想选择,尤其适合人机交互场景。
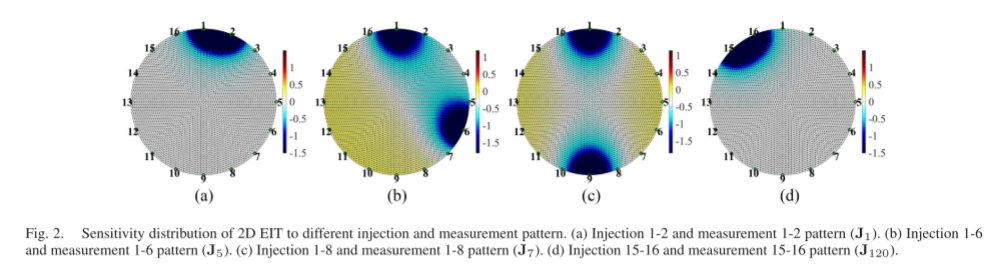
但 EIT 技术有个致命缺陷:灵敏度分布非均匀。简单来说,传感器不同位置对触摸的 “敏感程度” 差异很大 —— 靠近电极的区域对触摸更敏感,而中心区域则相对迟钝。从图 2 可以直观看到:不同电极注入 / 测量模式下(如电极 1-2、1-8 等),电极附近颜色越深(灵敏度越高),远离电极的区域颜色越浅(灵敏度越低),中心区域甚至 “几乎不敏感”
这种非均匀性会导致严重问题:同样大小的力作用在不同位置,传感器输出的电导率信号差异很大,难以校准和测量。例如,在中心施加 1N 的力,可能与在边缘施加 2N 的力产生相同的信号,这显然无法满足精确交互的需求。
为解决这一问题,现有方法各有局限:有的需要采集海量校准数据(如 “伪阵列法”),有的依赖复杂材料设计(如 “多材料复合结构”),还有的只能实现离散区域的灵敏度改善(如 “同心圆分区校正”)。为此,本文提出了一种全新的 “雅可比向量校正(JVC)方法”,无需大量数据,就能让传感器全区域灵敏度趋于均匀。
二、JVC 方法:如何让 EIT 传感器 “一视同仁” 地感知触摸?
2.1 先理解问题:EIT 传感器的 “偏心” 毛病
EIT 传感器的灵敏度天生 “偏心”:靠近电极的地方对触摸特别敏感,离电极越远(尤其是中心)越迟钝。
图 2 展示了 4 种不同电极注入 / 测量模式下的灵敏度分布(颜色越深灵敏度越高):
无论哪种模式(如电极 1-2、1-8 等),电极附近颜色最深(灵敏度最高);
中心区域颜色最浅(灵敏度最低),尤其当注入电极距离近时(图 2 (a)(d)),中心几乎 “没反应”。
这种 “偏心” 导致:同样 1N 的力,在电极附近会产生强信号,在中心却只有弱信号,无法直接比较 —— 这就是 JVC 方法要解决的核心问题。
2.2 JVC 方法的整体思路
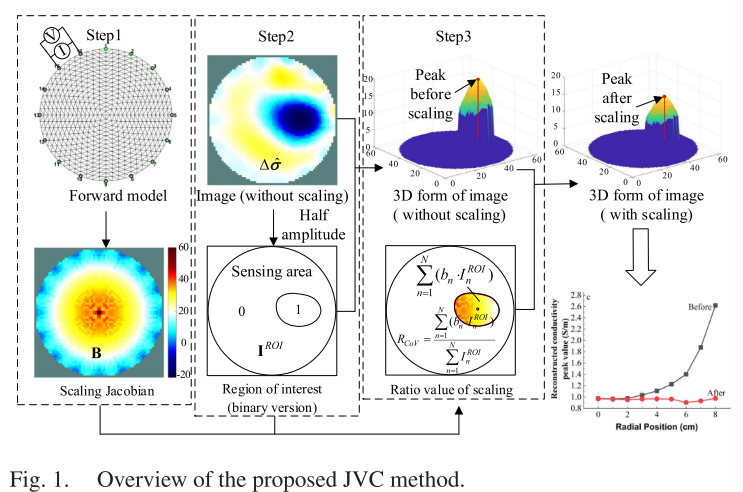
JVC 方法通过三步 “纠偏”,让传感器对所有位置的触摸 “一视同仁”,图 1 清晰展示了这一流程:
第一步:根据传感器的 “灵敏度矩阵(雅可比矩阵)”,生成一个 “反向校正向量”(抵消原始灵敏度的差异);
第二步:从重建图像中分割出触摸产生的 “有效区域(ROI)”(只关注真实触摸的位置);
第三步:用校正向量修正 ROI 内的电导率信号,让不同位置的信号强度与实际触摸力成正比,而非受灵敏度影响。
2.3 关键步骤 1:生成 “反向校正向量”
校正的核心是 “哪里敏感就削弱哪里,哪里迟钝就增强哪里”,这依赖于雅可比矩阵的特性:
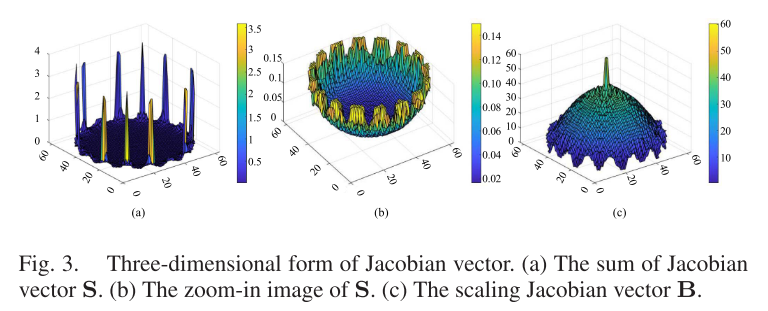
图 3 (a) 是原始灵敏度的 3D 分布(雅可比矩阵列元素求和结果),明显 “边缘高、中心低”—— 电极附近的灵敏度峰值是中心的 5 倍以上;
图 3 (b) 是图 3 (a) 的局部放大,更清楚看到中心区域的灵敏度 “低谷”;
图 3 (c) 是 JVC 生成的 “校正向量”,分布完全反向:边缘低、中心高,刚好能抵消图 3 (a) 的 “偏心”。
这个向量就像给传感器贴了一层 “平衡膜”:电极附近的膜 “阻力大”(削弱信号),中心的膜 “阻力小”(增强信号)。
2.4 关键步骤 2:锁定 “有效触摸区域(ROI)”
触摸会导致局部电导率变化,但传感器可能受到噪声干扰。JVC 通过 “阈值分割” 锁定真正的触摸区域:
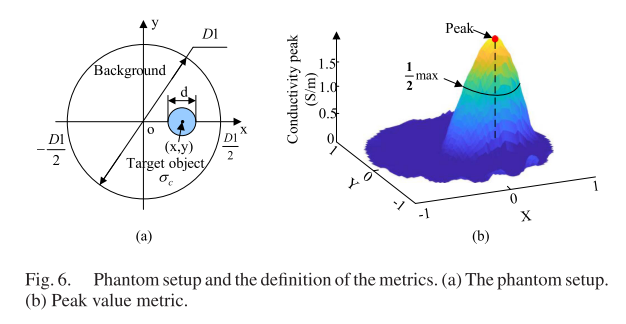
如图 6 (b) 的 3D 重建图像,触摸产生的电导率会形成一个 “峰值”,设定阈值为峰值的一半(t=0.5),超过阈值的区域就是 ROI(有效触摸区);
这样可以排除无关区域的干扰,确保校正只针对真实触摸的信号。
2.5 关键步骤 3:修正信号,实现 “一视同仁”
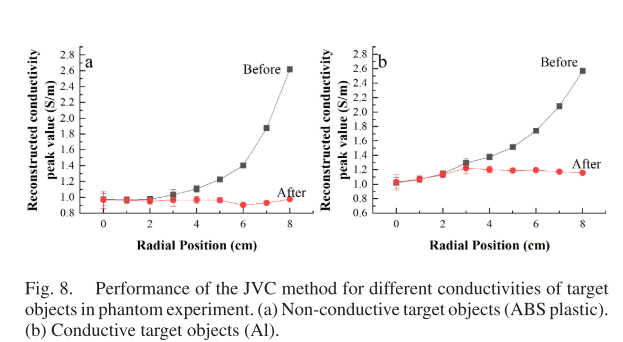
图 8 对比了校正前后的电导率峰值曲线(以铝块为例):
校正前:从中心到边缘,峰值从 1.0 飙升到 2.5(因灵敏度递增),曲线起伏剧烈;
校正后:曲线几乎水平,峰值稳定在 1.0 左右(不同位置的灵敏度被拉平)。
实时测试更直观:
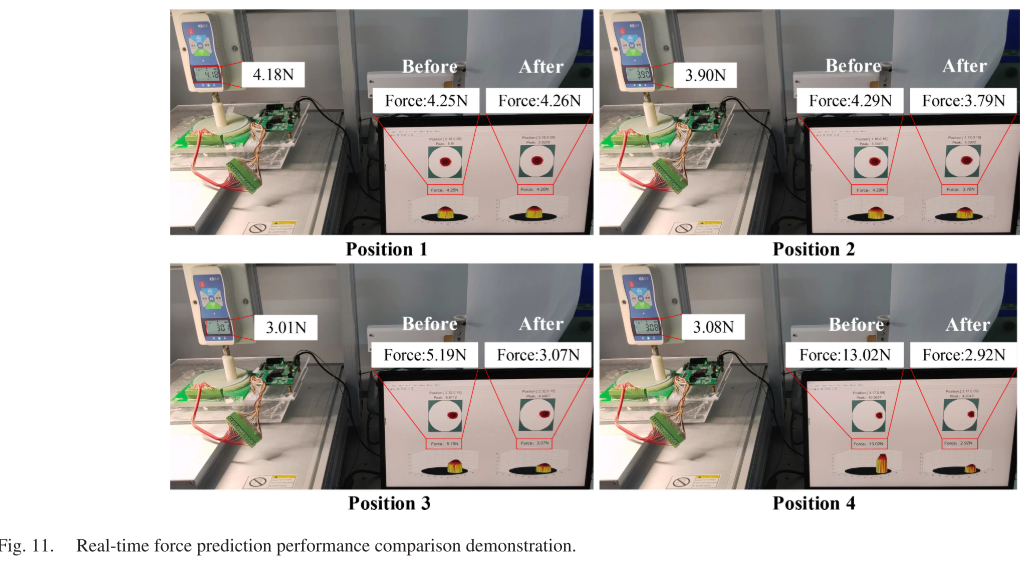
校正前:不同位置的 3D 重建图像峰值差异大(如位置 1 的峰值远高于位置 4),预测力与实际力偏差大;
校正后:各位置的峰值高度一致,预测力(如位置 1 从 4.18N 校正为 3.90N)更接近真实值。
通过这三步,JVC 方法借助反向校正向量抵消了天生的灵敏度差异,结合 ROI 聚焦有效信号,最终让 EIT 传感器在任何位置都能 “公平” 感知触摸力,实现真正的 “一视同仁”。
三、实验验证:从模拟到实物,JVC 方法真的有效吗?
为了证明 JVC 方法能让 EIT 传感器 “一视同仁” 感知触摸,研究团队做了两类实验 —— 先通过 “幻影实验” 模拟不同场景验证,再用实际的 “触觉传感器” 测试,所有结果都通过图片直观展示了 JVC 的有效性。
3.1 幻影实验(模拟测试):用 “水和物体” 模拟触摸,看校正效果
实验目的:模拟不同电导率、不同位置的 “触摸”,测试 JVC 方法能否让传感器对同一物体的响应一致。
实验 setup(图 5、图 6、图 7):
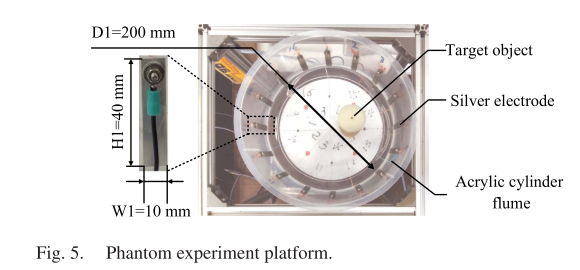
用一个直径 20cm 的亚克力圆筒当 “模拟传感器”(图 5),里面装满自来水(类似传感器的导电介质),筒壁均匀贴了 16 个银电极(负责通电和测电压);
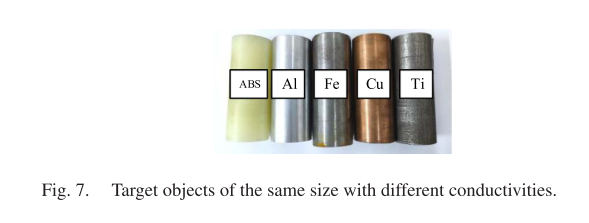
选了 5 个大小相同(直径 4cm)但电导率差很多的物体当 “触摸源”(图 7),包括不导电的 ABS 塑料、导电的铝块、铁块、铜块、钛块(电导率从 0 到 5.96×10⁷S/m 不等);
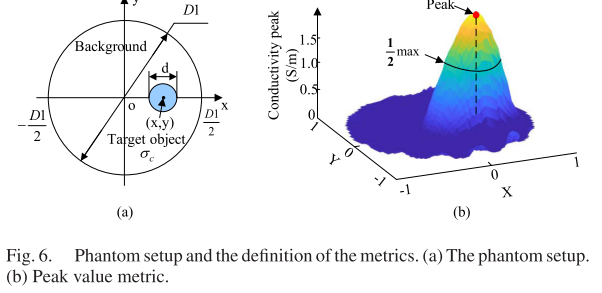
把这些物体从圆筒中心(x=0mm)慢慢移到边缘(x=80mm),每次移 10mm,记录传感器 “看到” 的电导率变化,对比校正前后的差异(图 6 (a) 是物体移动示意图,图 6 (b) 是电导率峰值的 3D 可视化 —— 峰值越高,传感器认为 “触摸越用力”)。
关键指标:LDCI 值(数值越小越好)
为了量化 “灵敏度均匀性”,研究者发明了 “位置依赖性一致性指标(LDCI)”:比如 LDCI=0.5,说明不同位置对同一物体的响应差异平均达 50%;LDCI=0.1,说明差异缩小到 10%。
实验结果(图 8、表 2、表 3):
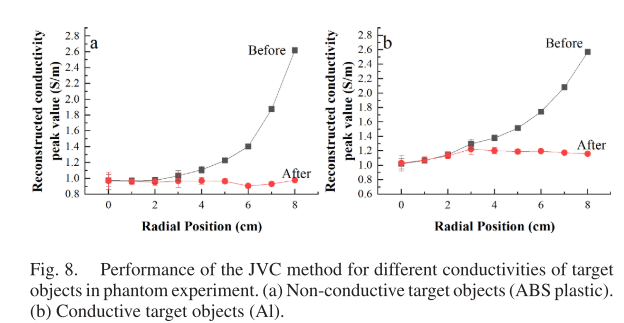
图 8 直观对比:左边是校正前的曲线,右边是校正后。
以铝块为例(图 8 (b)):校正前,物体在中心时电导率峰值是 1,移到边缘时峰值飙到 2.5(因为边缘灵敏),曲线像 “过山车”;校正后,曲线几乎平了,峰值稳定在 1 左右 —— 说明不同位置的响应一致了。
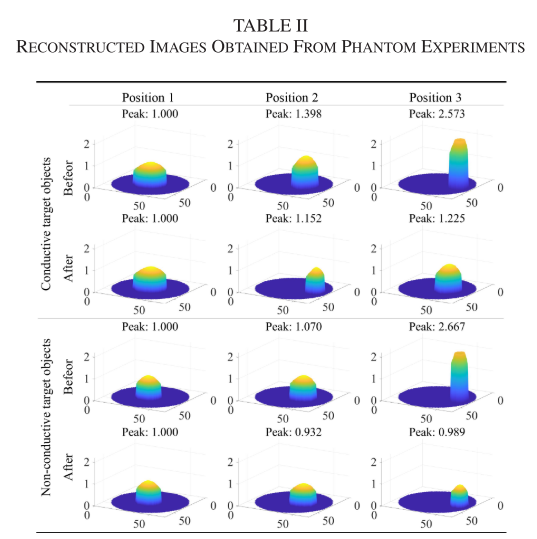
表 2 的重建图像:展示了 ABS 塑料和铝块在 3 个位置(中心、中间、边缘)的图像。
校正前:边缘的电导率峰值(如 ABS 在位置 3 的峰值 2.573)比中心(1.000)大很多;校正后:3 个位置的峰值几乎一样(ABS 在位置 3 的峰值降到 0.999),视觉上就能看出均匀性提升。
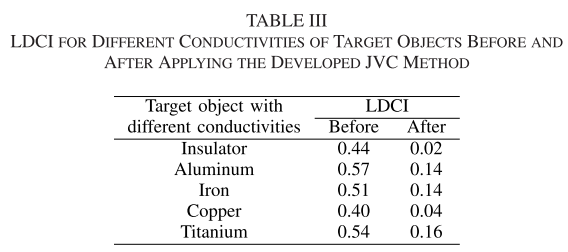
表 3 的 LDCI 数据:所有物体校正后 LDCI 都大幅下降。
比如不导电的 ABS 塑料,LDCI 从 0.44 降到 0.14;导电的铜块从 0.54 降到 0.16—— 数值越小,说明不同位置的灵敏度越一致,JVC 效果越明显。
3.2 触觉传感器实验(实物测试):用 “真实传感器” 测触摸力,看精度
实验目的:在实际的 EIT 触觉传感器上测试,看 JVC 能否让不同位置的力测量准确。
传感器长什么样(图 9):
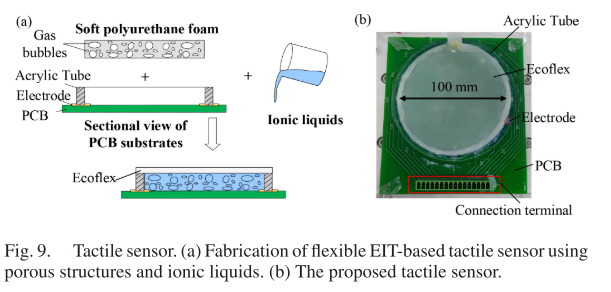
直径 10cm 的圆形传感器(图 9 (b)),核心是多孔聚氨酯泡沫(像海绵),里面灌了离子液体(导电用),边缘有 16 个电极 —— 触摸时泡沫变形,离子液体分布变化,电导率就会变,传感器通过电极捕捉这种变化。
实验 setup(图 10、图 11):
用机械臂带着力计,在传感器表面随机选位置,施加 0~4N 的力(类似人触摸的力度),每次记录 5 组数据;
对比校正前后的 “电导率峰值” 和 “实际力” 的关系,看预测是否准确。
实验结果(图 10、图 11):
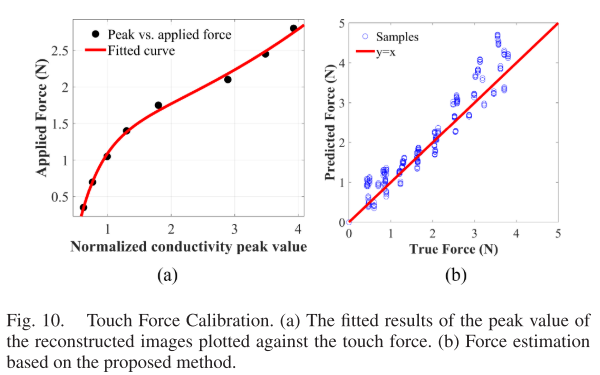
力与电导率的关系(图 10 (a)):校正后,电导率峰值和力的关系能完美用一条曲线拟合(R²=0.996),说明两者关联稳定 —— 不管在哪个位置,相同的力会对应相同的峰值。
预测力准不准(图 10 (b)):随机测了 315 次,预测力和实际力几乎重合,线性相关系数 0.978(越接近 1 越准),平均误差只有 0.37N(相当于 4N 的 9%),比没校正时好太多。
实时测试效果(图 11):看 4 个不同位置的实时画面 ——
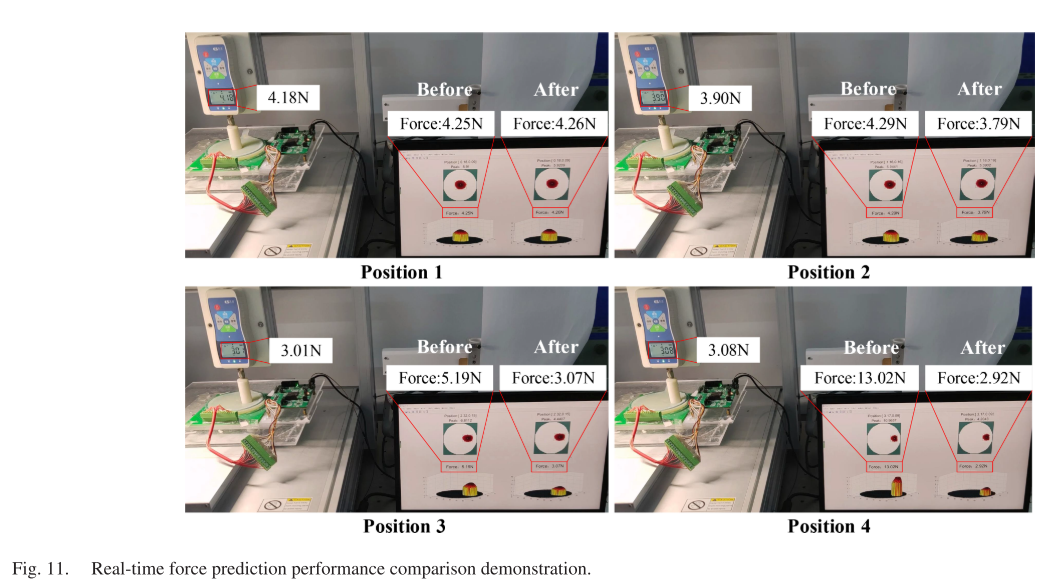
校正前:3D 重建图像的峰值忽高忽低(比如位置 1 的峰值比位置 4 大很多),预测力和实际力差得远;
校正后:不同位置的 3D 图像峰值差不多高,预测力(如位置 1 从 4.18N 校正为 3.90N)几乎等于实际力,肉眼就能看出稳定。
结论:JVC 方法真的有效!
从模拟到实物,所有图片和数据都证明:
没 JVC 时,传感器对同一物体、同一力的响应 “看位置下菜碟”(边缘灵敏、中心迟钝);
用 JVC 后,不同位置的响应一致了,力预测误差小到能满足人机交互需求 ——JVC 确实让 EIT 传感器做到了 “一视同仁” 感知触摸。
四,总结
本文提出了一种新颖的雅可比向量校正(JVC)方法,用于校准和检测基于电阻抗断层成像(EIT)的触觉传感器的接触力,直接解决了其空间灵敏度不均匀的问题。该方法通过构建基于系统雅可比矩阵的定制缩放向量,实现了传感区域内近似均匀的灵敏度,且无需在整个传感表面进行大量的实验数据收集,具有数据高效性的特点
通过有限元法(FEM)模拟、幻影实验和传感器校准评估,全面验证了 JVC 方法的有效性:幻影实验中,不同电导率目标物体的位置依赖性一致性指标(LDCI)显著降低,证明其在不同导电场景下均能提升灵敏度一致性;在基于多孔聚合物和离子液体结构的 EIT 传感器原型上,该方法实现了 0 至 4N 范围内不同位置的准确且一致的触摸力预测,预测力与实际力的线性相关系数达 0.978,均方根误差仅 0.37N,验证了其实用性。
JVC 方法增强了 EIT 基大面积触觉传感器的实用性和适用性,为需要安全触摸力感知的各类人机交互场景提供了重要进展。未来研究将致力于扩展至多点力检测,并整合多模态触觉传感能力,进一步拓展其在机器人、假肢、医疗健康等领域的应用。