【影刀RPA_初级课程_我的第一个机器人】
声明:相关内容来自影刀学院,本文章为自用笔记,切勿商用!(若有侵权,请联络删除)
1. 数据抓取功能-1 抓取订单数据
本次课程的主要内容为制作批量抓取订单数据机器人
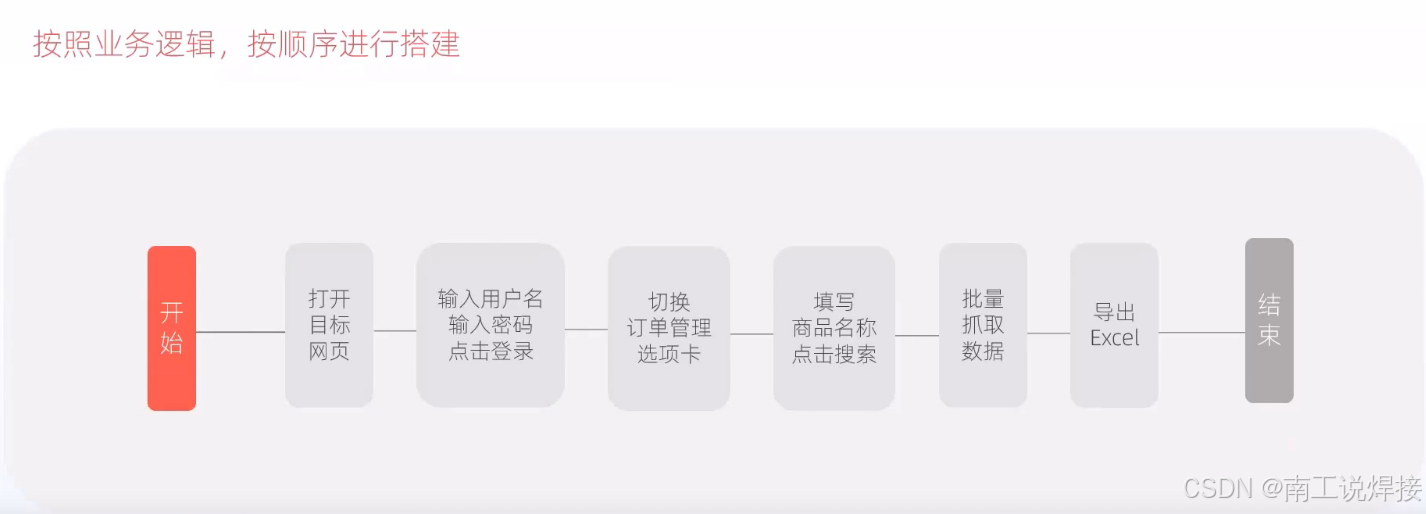
1.1 流程图
1.2 本节小结
开发准备(业务流程梳理)→ 数据抓取(获取表格化的数据) → 数据保存(导出数据表格)

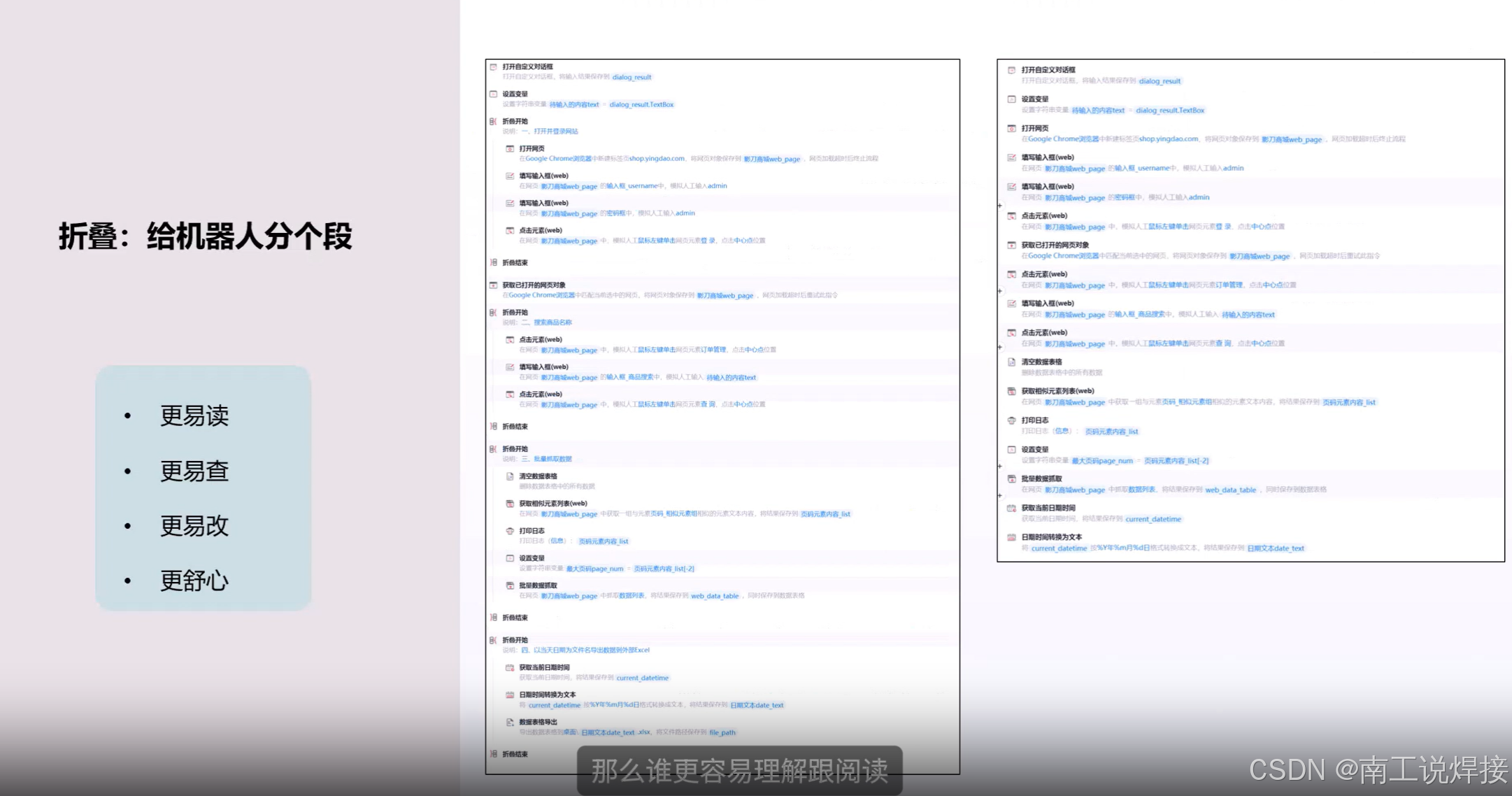
2. 折叠功能 -2 给机器人分个段
更易读 、 更易查、 更易改 、 更舒心

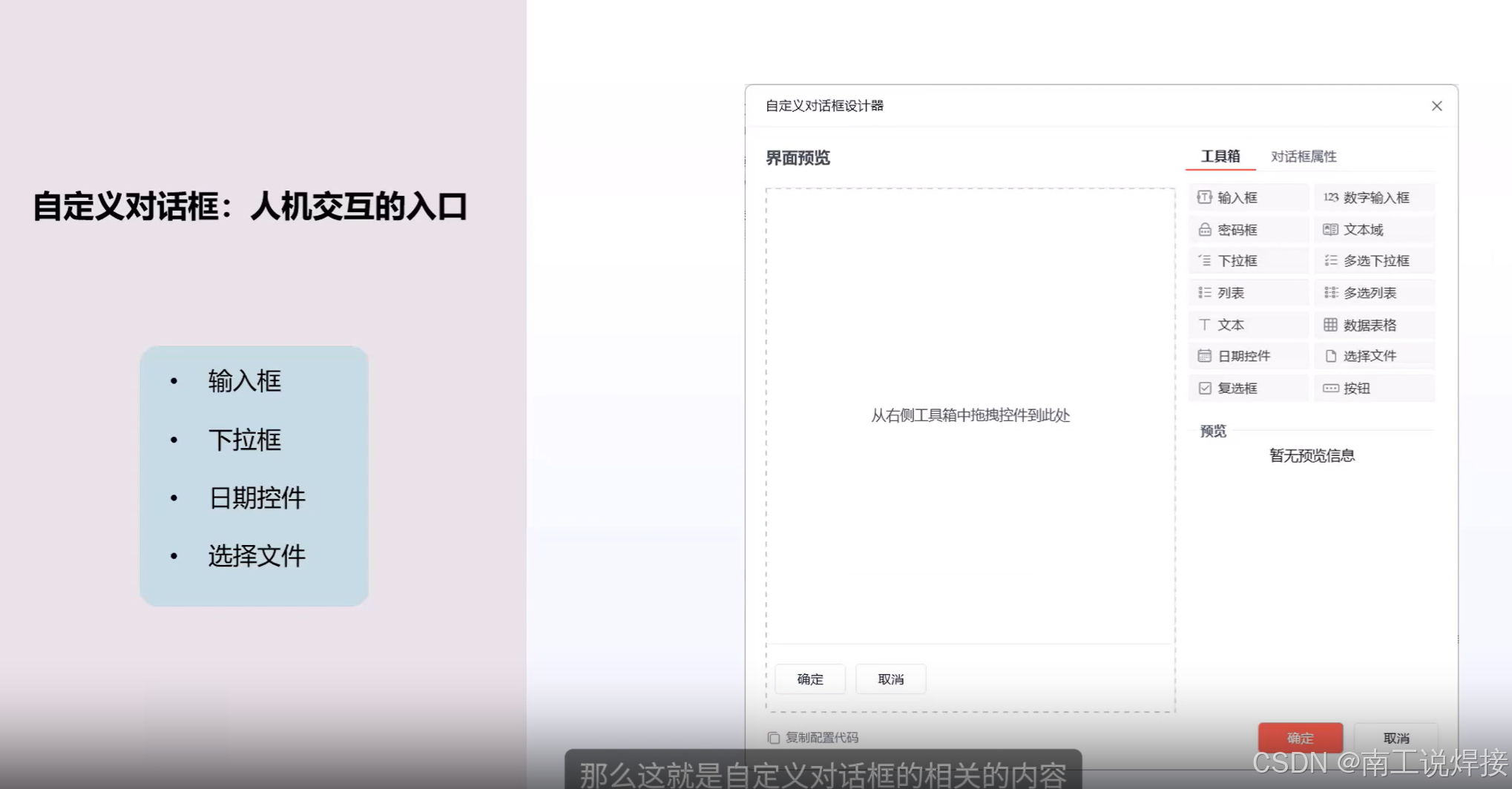
3. 机器人的输入- 3 自定义对话框
提供了一个接口,让用户可以在程序代码外输入相应的信息(人机交互的入口)~~~
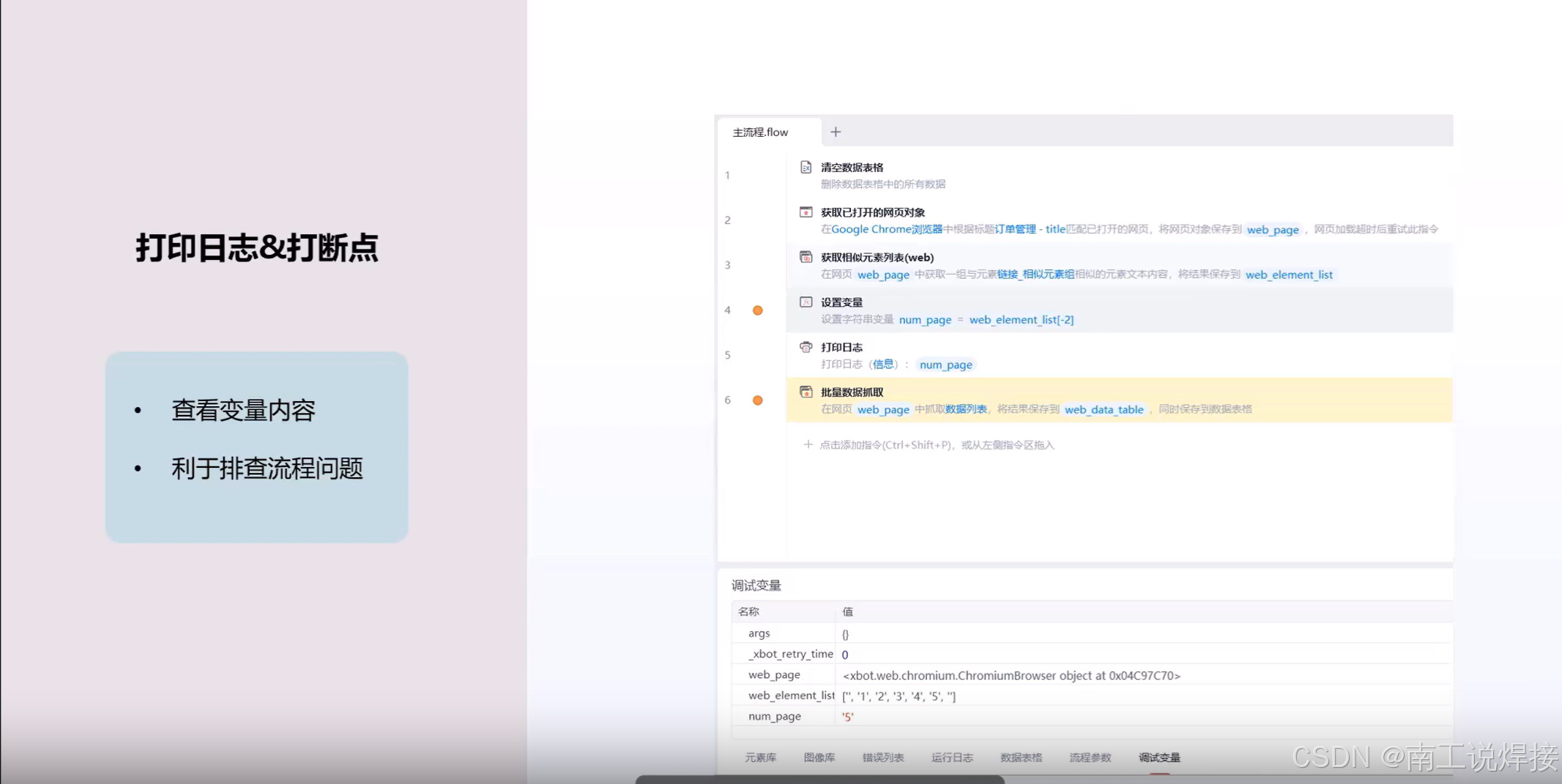
4. 机器人的输出-4 打印日志&打断点(主要用于程序调试)
5. 发版-5 机器人的分享
我的机器人 只有发版后,别人才能通过共享链接进行使用!

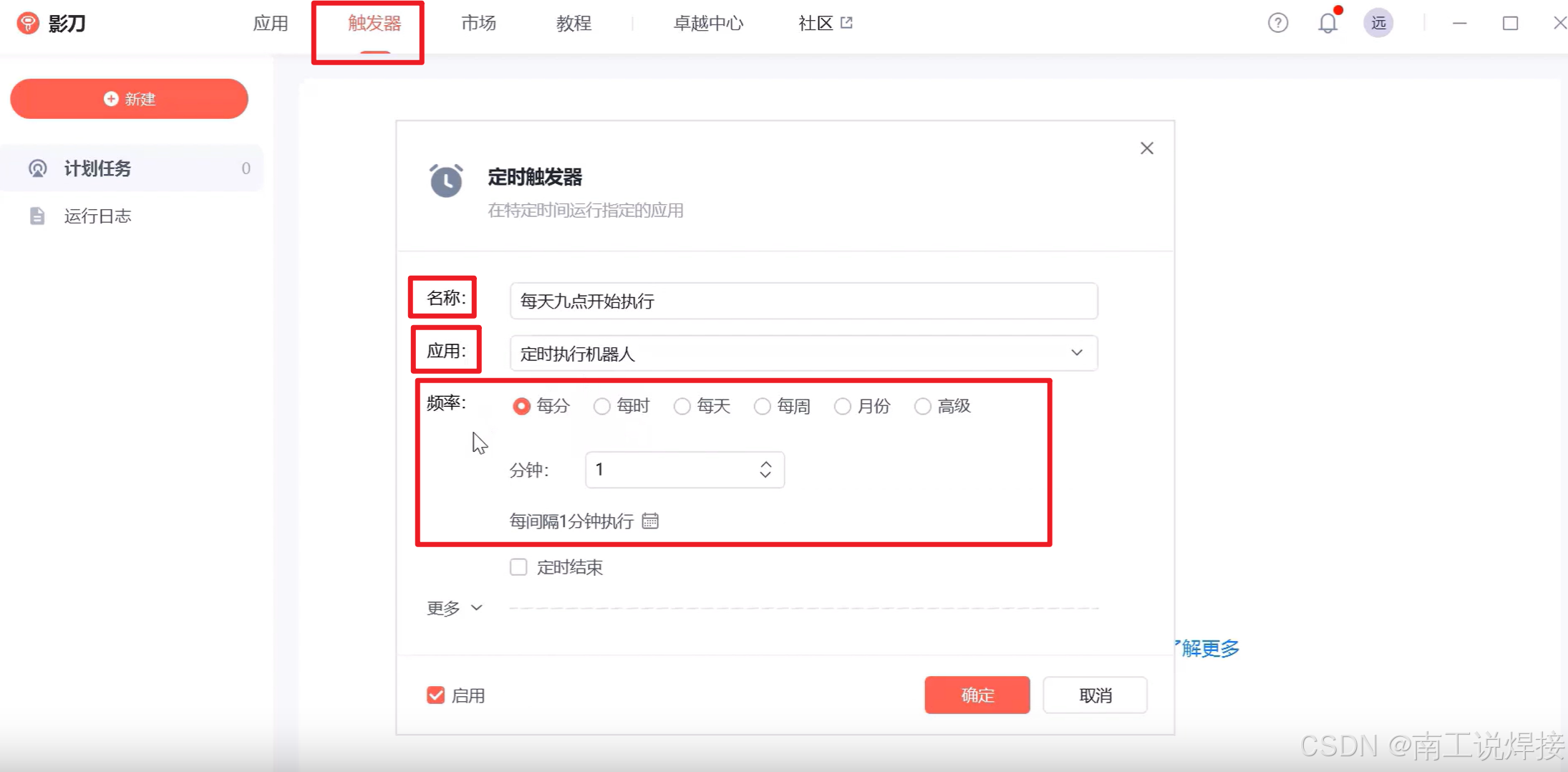
6. 触发器-6 机器人的定时执行
先发版,后在触发器设定触发时间