硬件设计学习DAY3——电源Buck电路深度解析:CCM/DCM/BCM模式与电感设计
每日更新教程,评论区答疑解惑,小白也能变大神!"

目录
一.开关电源BUCK电路
二.CCM、DCM、BCM三种工作模式解析
2.1 CCM(连续导通模式)
2.2 DCM(非连续导通模式)
2.3 BCM(边界导通模式)
2.4关键参数
2.5模式对比
三.CCM降压变换器工作特点解析
3.1PWM控制与开关行为
3.2关键波形分析
3.3设计优化方向
3.4CCM模式核心特性
四.DCM工作模式及特点解析
4.1CCM与DCM的切换条件
4.2DCM波形特性
4.3输出电压控制差异
4.4DCM的核心特点
4.5实际影响
五.Buck调整器电感选择的关键点
5.1电感量对临界负载电流的影响
5.2空间与成本限制
5.3设计原则
5.4测试观察总结
5.5芯片特性
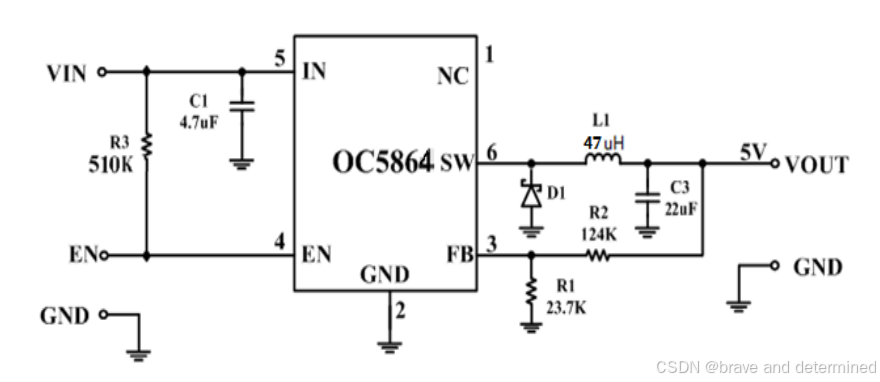
一.开关电源BUCK电路
二.CCM、DCM、BCM三种工作模式解析
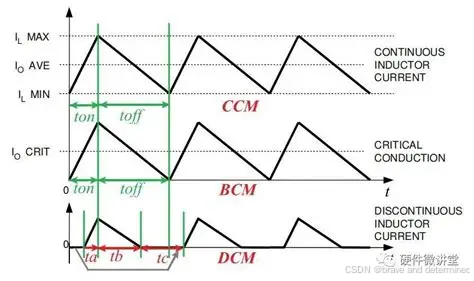
2.1 CCM(连续导通模式)
电感电流在整个开关周期内始终大于零,不会降至零。
特点:
- 每个周期开始前,电感仍有残余电流(磁通未完全复位)。
- 适用于大功率或高负载场景,电流纹波较小。
- 控制简单,但开关损耗相对较高。
2.2 DCM(非连续导通模式)
电感电流在每个周期内会降至零并维持一段时间。
特点:
- 电感电流从零开始上升,下降后也回到零(磁通完全复位)。
- 适用于轻负载或小功率场景,开关损耗较低。
- 电流纹波较大,需注意EMI问题。
2.3 BCM(边界导通模式)
电感电流刚好在周期结束时降至零,控制器立即开启下一个周期。
特点:
- 介于CCM与DCM之间,通过检测电流零点触发开关。
- 工作频率可变(随负载变化),兼顾效率和EMI性能。
- 又称CRM(临界导通模式),常见于PFC电路设计。
2.4关键参数
- 纹波电流:峰值电流($I_{peak}$)与谷值电流($I_{valley}$)之差。
- 平均电流:电流斜坡中点值,对应直流输出电流。
2.5模式对比
- CCM:电流连续,适合高负载,效率中等。
- DCM:电流断续,适合轻负载,效率高但纹波大。
- BCM:零电流开关,频率可变,平衡效率与复杂度。
通过调整电感值、负载或开关频率可切换模式,实际设计中需权衡效率、成本和性能需求。
三.CCM降压变换器工作特点解析
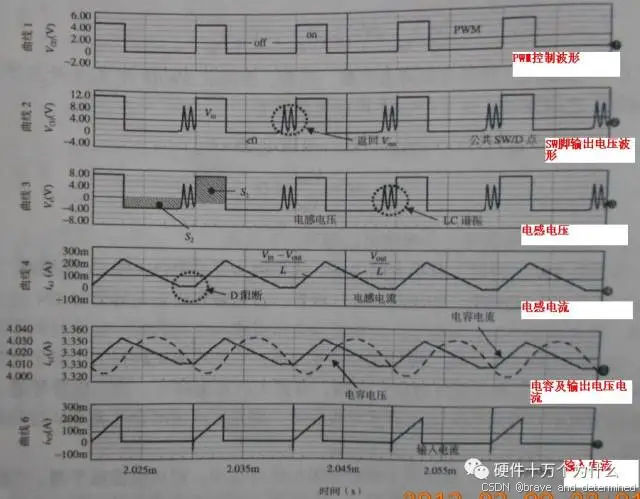
3.1PWM控制与开关行为
- 开关导通时(占空比D期间),SW/D点电压等于输入电压Vin,电感电流线性上升。
- 开关关断时(1-D期间),SW/D点电压因电感续流作用下拉至负压,二极管D导通维持电流通路。
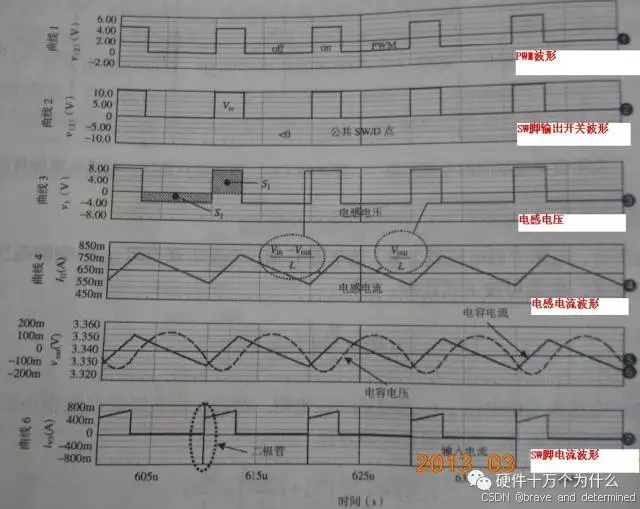
3.2关键波形分析
- 电感电压:导通阶段电压为Vin-Vout(面积S1),关断阶段为-Vout(面积S2)。稳态时S1 + S2 = 0,推导出输出电压Vout = D·Vin。
- 电流尖峰成因:
- 二极管反向恢复:PN结二极管关断时需清除少数载流子,导致短暂短路效应;肖特基二极管则因结电容放电产生尖峰。
- 输入电流脉动:电感有限时输入电流呈方波,含高频谐波,增加滤波难度。
3.3设计优化方向
- 选用反向恢复快的二极管(如肖特基)或软开关技术降低尖峰。
- 增大电感值可平滑输入电流,但需权衡体积与响应速度。
3.4CCM模式核心特性
- 降压特性:输出电压Vout = D·Vin(D < 1),恒低于输入电压。
- 负载无关性:理想情况下转换比M仅取决于占空比D。
- 损耗来源:二极管反向恢复和开关寄生电容导致额外损耗。
- 纹波对比:输出电流平滑(低纹波),输入电流脉动大(需强滤波)。
3.5谐波影响
- 方波输入电流含丰富奇次谐波(1,3,5…倍基频),需LC滤波器抑制高频噪声。
四.DCM工作模式及特点解析
4.1CCM与DCM的切换条件
-
当负载电流较大时,Buck变换器工作在CCM(连续导通模式),电感电流始终大于零。负载电流减小到纹波电流峰峰值的一半时,电感电流最小值降至零,进入临界状态。负载电流进一步减小,电感电流会出现断续,进入DCM(断续导通模式)。
4.2DCM波形特性
-
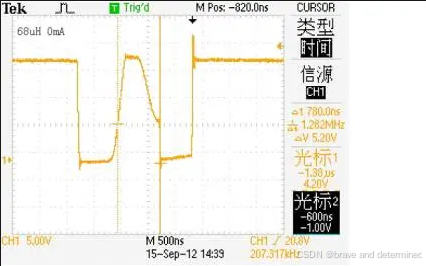
电感电流降为零后,续流二极管关闭,电感左端因寄生电容(如二极管/开关管结电容)形成谐振回路,产生衰减振荡(见图6)。实际测试中,振荡可能出现位置差异(如图7),这与电路寄生参数和阻尼有关。
-
4.3输出电压控制差异
- CCM模式下,输出电压公式为 ( V_{out} = D \cdot V_{in} ),占空比D与负载电流无关。DCM模式下,传递函数变为:
- [ V_{out} = V_{in} \cdot \frac{2}{1 + \sqrt{1 + \frac{4L}{D^2 T R}}} ]
- 此时占空比D需随负载电流调整以维持稳压,控制环路需重新设计。
4.4DCM的核心特点
- 负载依赖性:电压转换比M与负载电流直接相关。
- 占空比动态调整:D需随负载减小而降低,否则输出电压可能失控。
- 传递系数差异:相同占空比下,DCM的M值大于CCM;轻载时易达到M=1(即 ( V_{out} \approx V_{in} ))。
4.5实际影响
- DCM模式下电路动态响应和环路稳定性会变化,需针对性优化补偿网络。对于Buck电路,DCM虽能正常工作,但需注意轻载效率和谐振振荡问题。
五.Buck调整器电感选择的关键点
5.1电感量对临界负载电流的影响
- 电感量(L)越大,临界负载电流(即电路从断续模式转入连续模式的电流值)越小。实测数据表明:
- 27μH电感需100mA负载消除振荡
- 33μH电感需55mA
- 47μH电感需45mA
- 68μH电感需30mA
- 136μH电感需20mA
- 204μH电感需12mA
- 电感增大时,振荡波形宽度减小,系统更易进入连续模式,但极轻载(<10mA)仍可能存在振荡。
5.2空间与成本限制
- 理论计算可能需要303μH电感,但实际选用68μH,原因包括:
- 大电感体积大,可能超出PCB空间限制。
- 电感量增加会提高成本,需平衡性能与预算。
5.3设计原则
- “够用即可”是实用准则:
- 确保电感量满足最低负载需求(如30mA对应68μH)。
- 避免过度设计,优先考虑布局和成本。
5.4测试观察总结
- 负载电流增加时,SW关断时的振荡宽度减小。
- 电感量越大,振荡在更小负载电流下消失,但无法完全消除极轻载(<10mA)的振荡。
5.5芯片特性
- 电感选择需结合芯片规格,确保在目标负载范围内稳定工作。
