【2025ICCV】基于 CL-Splats 的3D高斯溅射模型
1. 背景与核心问题
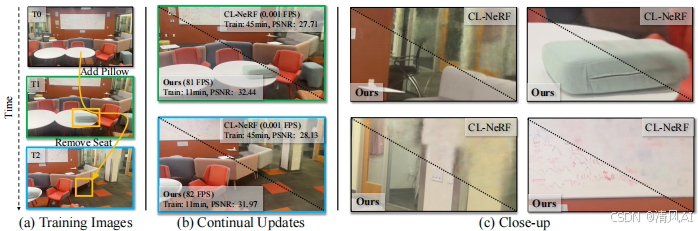
在动态3D环境(如机器人、混合现实和具身AI)中,场景会随时间变化(例如物体移动、添加或移除)。传统方法如NeRF(神经辐射场)或3DGS(3D高斯溅射)在更新场景时面临挑战:
- 计算效率低:重新优化整个场景耗时且不切实际。
- 灾难性遗忘:现有方法(如CLNeRF或CL-NeRF)在更新时会丢失未变化区域的信息。
- 局部更新困难:缺乏针对变化区域的精准优化机制,导致重建质量下降。
CL-Splats通过结合点云和NeRF方法的优势,提出一个显式表示框架,支持高效、局部化的更新,同时保持高保真重建质量。关键贡献包括: - 一个轻量级变化检测模块。
- 首个动态局部高斯优化器。
- 支持场景历史恢复和并发更新应用。
2. 方法详述
CL-Splats的工作流程分为三步:2D变化检测、3D变化提升和局部优化。输入包括前一时刻的高斯溅射重建 Gt−1 和新视图图像 It。
2.1 2D变化检测
- 相机姿态对齐:使用COLMAP估计新图像的相机姿态,确保与现有重建坐标系一致。
- 特征提取与比较:利用DINOv2特征提取器 E,计算渲染图像 I^it−1(从 Gt−1 渲染)和真实图像 Iit 的每块特征图:
F^it−1=E(I