SimScape物理建模实例2--带控制的单质量弹簧阻尼系统
模型下载:
基于simscape,单质量系统带位置控制资源-CSDN文库
在实例1中,我们搭建了不带控制的单质量弹簧阻尼系统,该系统没有外界力量介入,只有弹簧的初始弹力,带着弹簧使劲弹来弹去。
SimScape物理建模实例1--单质量-弹簧-阻尼系统-CSDN博客
在实例2中,我们为该系统加入一个外力,通过外力,控制质量块的位移。
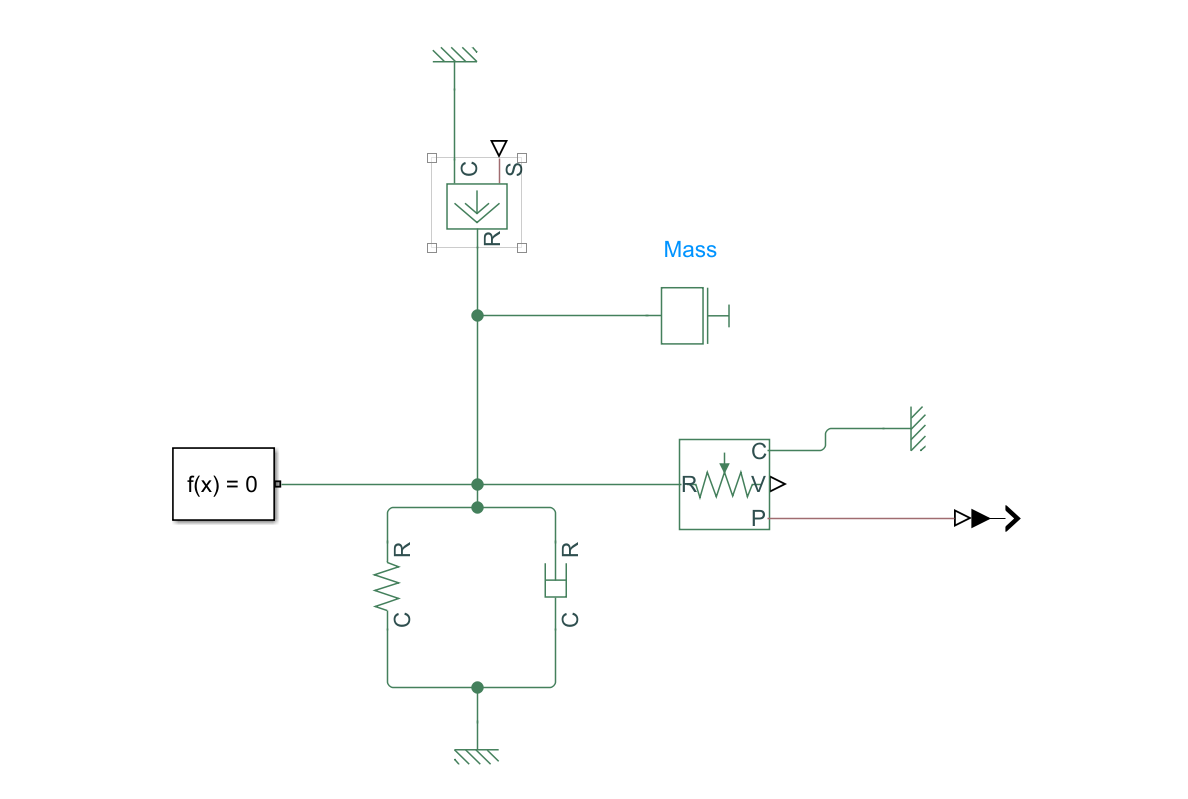
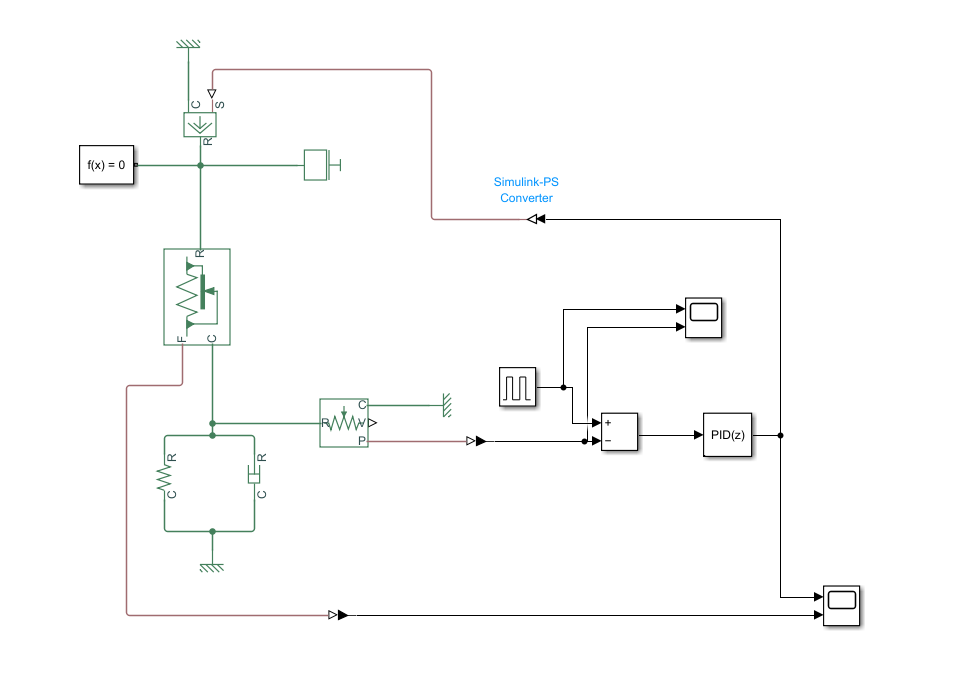
1. 在demo1的基础上加入一个理想力源模块。

2、按照模块描述,S口接控制信号,R和C是机械传递转换接口,正方向的力是由C传递到R。这里我们将C接参考地,R接质量块回路,如下图所示:
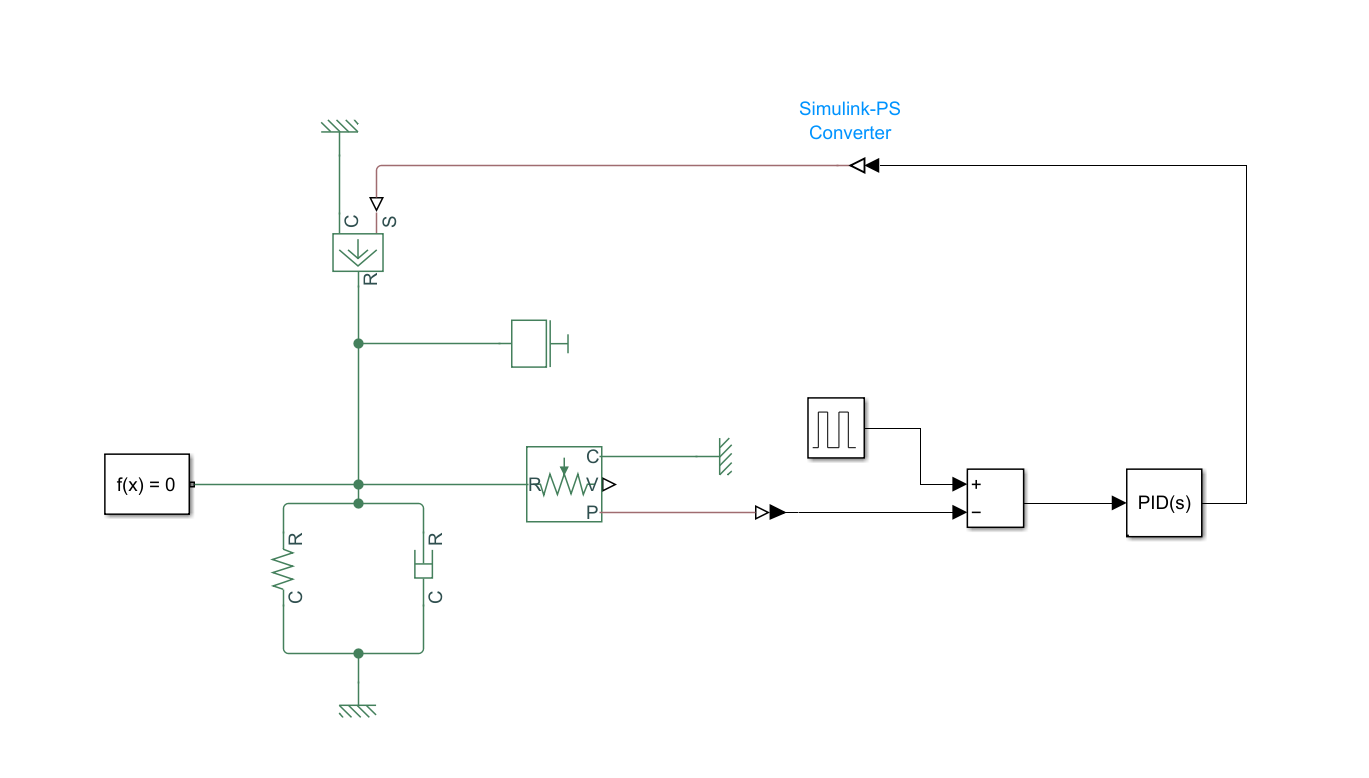
3、搭建PID控制回路,并调试pid参数
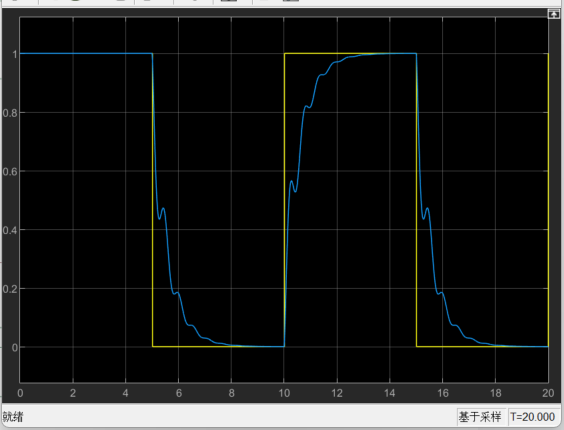
位移控制效果如下:
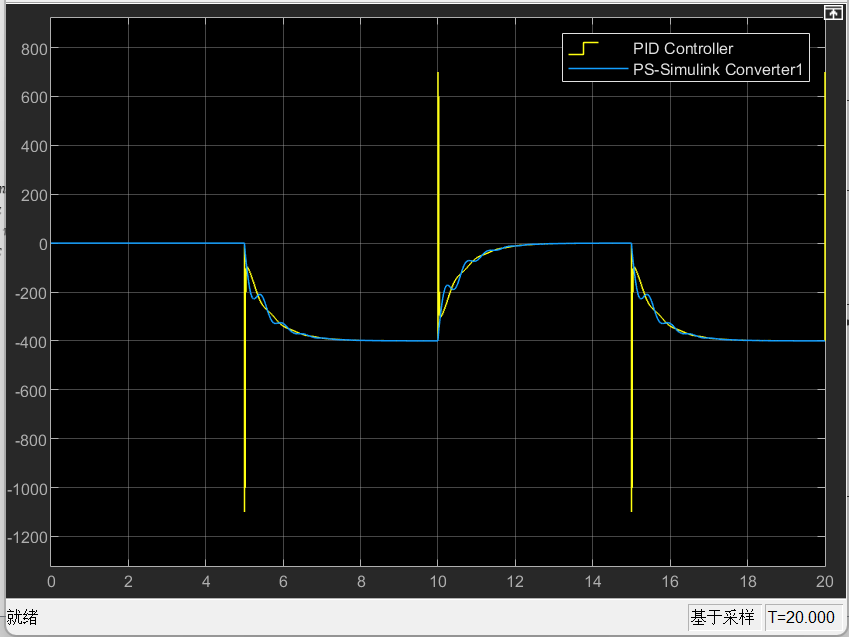
4、加入力传感器,对比理想力与pid计算出的力差别。根据说明描述,F是传感器力值,如力的传递是由C传到R为正方向,如我们实际生活中要加力传感器,需要将物体断开接上拉压传感器一样,我们这里也要将原有的力回路断开,链接上力传感器。

如下图所示:
运行仿真后发现,理想力源产生的实际力与pid期望力如下所示。