常用电机类型及其特点对比
1. 直流电机
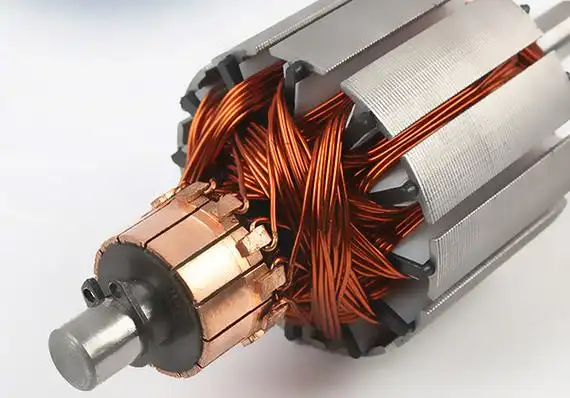
直流电机里边固定有环状永磁体,电流通过转子上的线圈产生安培力,当转子上的线圈与磁场平行时,再继续转受到的磁场方向将改变,因此此时转子末端的电刷跟转换片交替接触,从而线圈上的电流方向也改变,产生的洛伦兹力方向不变,所以电机能保持一个方向转动。
1.1 直流有刷电机:低功率机器人(轮式底盘、玩具机器人)
依靠电刷和换向器的机械接触实现电流方向切换,定子通常为永磁体或电磁铁,转子绕组通过换向器与电刷接触,形成旋转磁场驱动电机。
- 结构简单,成本低,控制方便
- 电刷易磨损,寿命较短,运行时可能产生电火花和噪音
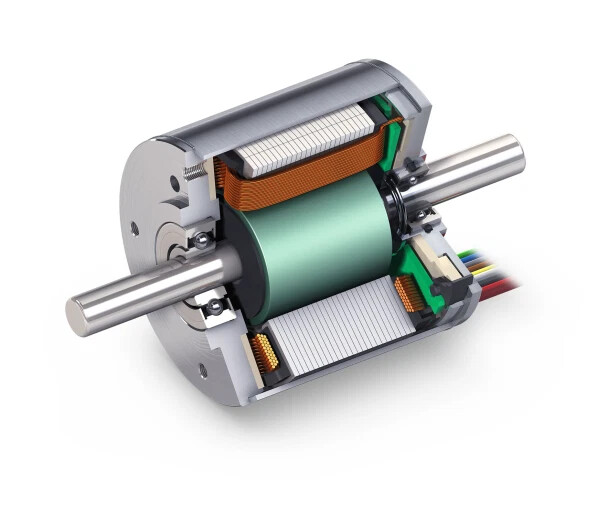
1.2 直流无刷电机(无人机、工业机器人、电动工具)
采用电子控制器(如PWM)检测转子位置,通过半导体开关(如MOS)控制定子绕组通电顺序,无需物理接触部件。
- 无电刷,寿命长,效率高,噪音低。
- 需电子换向,控制复杂度较高。
2. 交流电机
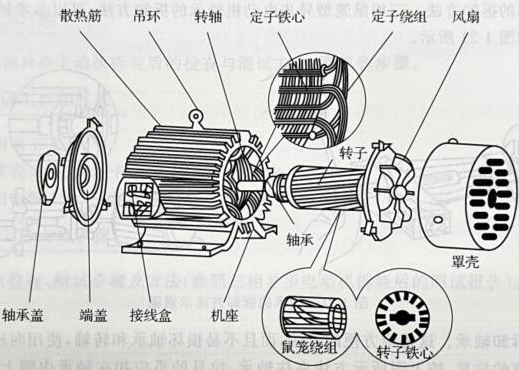
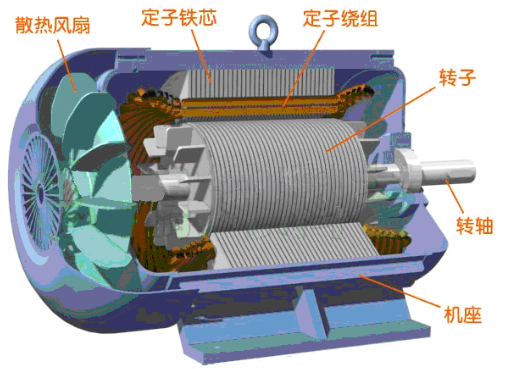
交流电机的工作原理基于电磁感应和旋转磁场。定子绕组通入三相交流电后产生旋转磁场,转子导体在旋转磁场中切割磁感线,产生感应电动势和电流。这些电流在磁场中受到洛伦兹力作用,形成电磁转矩驱动转子旋转。由于转子转速低于旋转磁场的同步转速,存在滑差,确保持续切割磁感线维持电流与转矩
2.1 交流异步电机(工业泵机、风机、重型机械)
转子通常由铜或铝的导体材料制成,固定在电机轴上,基于相对运动的磁场产生感应电动势。当定子绕组通过交流电源供电时,会产生旋转磁场,带电的转子在定子旋转磁场里受力,跟着定子磁场向相同方向旋转,由于转子的非同步性,转子开始旋转,因此称为“异步”电机。
- 结构简单,可靠性高,成本低,适合大功率场景。
- 调速性能较差,需搭配变频器实现高效控制。
2.2 交流永磁同步电机(电动汽车驱动、高精度工业伺服系统)
转子上嵌入永磁体(稀土磁体),这些永磁体产生一个恒定的磁场,当定子绕组通过交流电源供电时,会产生旋转磁场,转子放进定子后,定子的磁场要比转子磁场强很多,利用定子绕组产生的磁场与永磁体的磁场同步,电机以同步速度实现运动。
- 永磁体励磁,效率高(90%-95%),功率密度大。
- 依赖稀土材料,高温可能退磁。
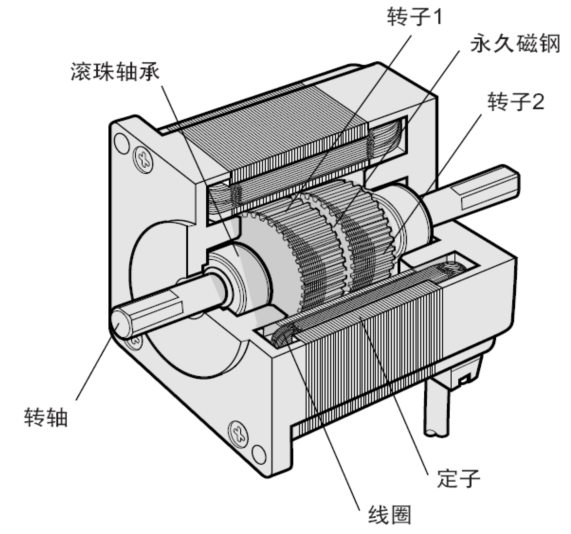
3. 步进电机:需要精确步进控制场景(3D打印机、数控机床、简易机械臂)
一种专门用于速度和位置精确控制的特种电机,以固定的角度(步距角)一步一步旋转运行,故称步进电机,特点是没有累积误差,接收到控制器发来的每一个脉冲信号,在驱动器的驱动下电机运转一个固定的角度。
- 开环控制,通过脉冲信号精准控制角度位移,无累积误差。
- 低速时扭矩大,但高速性能差,易产生振动和噪音。
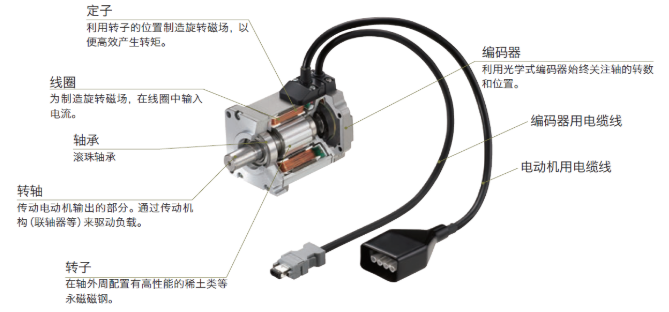
4. 伺服电机:高精度自动化设备(工业机械臂、协作机器人)
通过闭环控制系统,将指令信号与反馈信号对比并调整输出,电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行实时比较,调整转子转动的角度,从而实现精确控制。
- 闭环控制,支持位置、速度、力矩三环反馈,精度高、响应快。
- 过载能力强(可达3倍额定扭矩),动态响应时间短(毫秒级)。
- 成本较高,机械结构复杂。
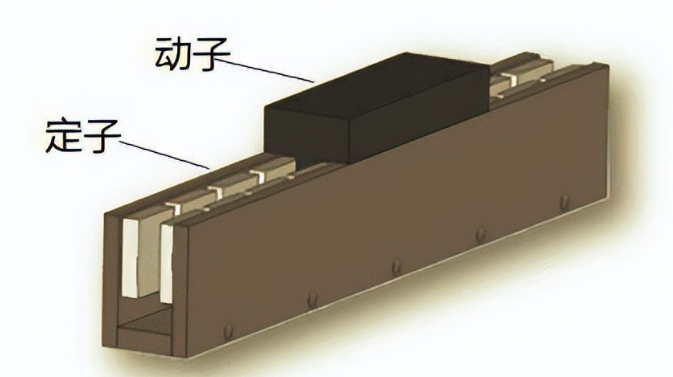
5. 直线电机(磁悬浮列车、高速数控机床、物流分拣机器人)
通过将封闭式磁场展开为开放式磁场的方式,当电流通入定子绕组后,会产生沿纵向方向正弦分布的气隙磁场。随着三相电流的变化,这个气隙磁场会按照交流电的相序沿直线定向移动,形成行波磁场。动子导体在行波磁场的切割下会产生电动势,进而形成定向感应电流。在定子和动子的感应电流与磁场的共同作用下,会产生纵向电磁推力。如果定子保持固定,那么动子就会沿着行波磁场的运动方向做直线运动。
- 直接输出直线运动,无需传动机构,速度高、精度高。
- 能耗较高,成本昂贵。
6. 无框力矩电机(仿人机器人关节、手术机器人、协作机械臂)
跟普通伺服电机以输出功率为评价指标不同的是,无框力矩电机更偏向以输出扭距为衡量指标。无框力矩电机仅包含传统电机中用于产生转矩和速度的转子和定子,但没有轴、轴承、外壳、反馈或端盖。转子由带永磁体的旋转钢圆环构成,直接安装在机器轴上,定子紧凑地安装在机器外壳的主体内。
- 无传统框架结构,体积紧凑,齿槽转矩极低,适合高动态响应场景。
- 高转矩密度、高刚度、效率高、结构紧凑、静音
