2025年OE SCI2区TOP,势场蚁群算法+无人水面艇路径规划,深度解析+性能实测
目录
- 1.摘要
- 2.改进势场蚁群算法
- 3.结果展示
- 4.参考文献
- 5.代码获取
- 6.算法辅导·应用定制·读者交流
1.摘要
无人水面艇(USVs)的应用领域不断拓展,路径规划算法已成为研究热点。然而,现有研究普遍存在对复杂动态水域适应性不足的问题。因此,本文通过改进信息素更新策略,优化启发式函数并与人工势场函数,提出了一种蚁群算法与人工势场算法相融合路径规划优化算法,该算法有效解决了无人船在复杂内河航道中因速度变化和障碍物干扰而陷入无解问题。
2.改进势场蚁群算法
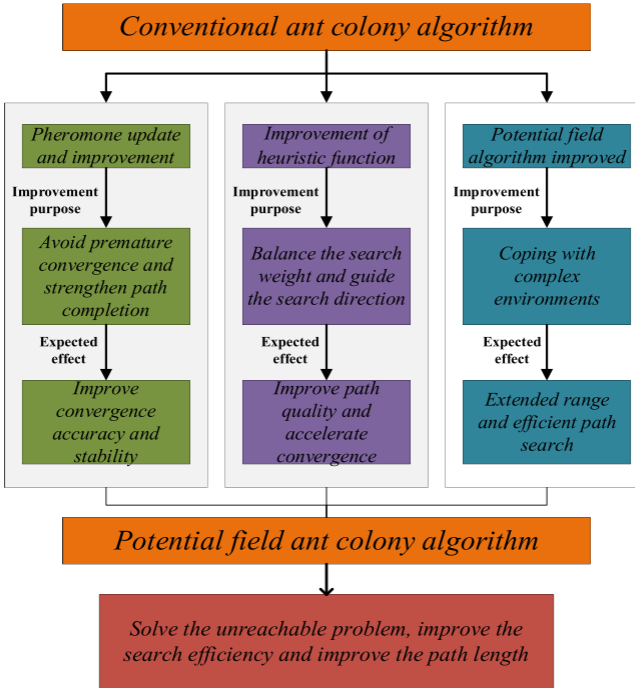
信息素更新
当采用信息引导信息素更新策略对信息素矩阵进行更新时,会向新迭代访问边分配更多信息素,从而引导蚂蚁的搜索方向并提高算法的收敛速度。
τi,jn=ητi,jn+∑x∈Π1g(x∣λn)+Δτ\tau_{i,j}^n=\eta\tau_{i,j}^n+\sum_{x\in\Pi}\frac{1}{g(x|\lambda^n)}+\Delta\tau τi,jn=ητi,jn+x∈Π∑g(x∣λn)1+Δτ
其中,λ\lambdaλ为权重向量,τ\tauτ表示信息素浓度。为避免向边缘分配更多信息素更新:
Δτ={1g(x∣λn),if(i,j)belongtoEn0otherwise\Delta\tau= \begin{cases} \frac{1}{g(x|\lambda^n)},if(i,j)belongtoE_n \\ 0\quad otherwise & \end{cases} Δτ={g(x∣λn)1,if(i,j)belongtoEn0otherwise
对信息素浓度进行约束:
τij′(h)={τmin,τij′(h)<τminτij′(h),τmin≤τij′(h)≤τmaxτmax,τij′(h)>τmax\tau'_{ij}(h) = \begin{cases} \tau_{\min}, & \tau'_{ij}(h) < \tau_{\min} \\ \tau'_{ij}(h), & \tau_{\min} \leq \tau'_{ij}(h) \leq \tau_{\max} \\ \tau_{\max}, & \tau'_{ij}(h) > \tau_{\max} \end{cases} τij′(h)=⎩⎨⎧τmin,τij′(h),τmax,τij′(h)<τminτmin≤τij′(h)≤τmaxτij′(h)>τmax
启发式函数
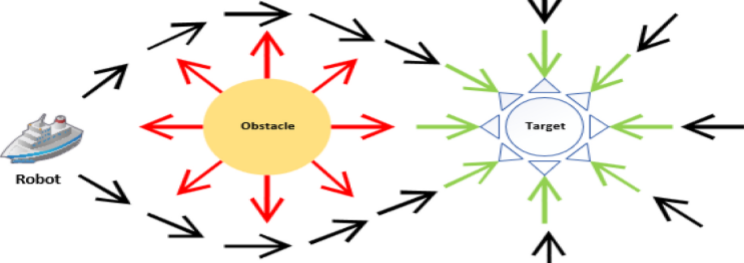
无人艇在接近目标区域时,其启发式信息逐渐增强,但障碍物往往会阻碍其顺利抵达终点。在APF基础上,本文引入力场合力对启发式函数进行修正:
UALL=UO+UTU_{ALL}=U_O+U_T UALL=UO+UT
其中,UALLU_{ALL}UALL表示势场合力,UOU_OUO为障碍物对船只产生的斥力,UTU_TUT为目标点对船只产生引力。
本文引入动态影响系数,其随迭代次数实时更新实现启发式信息对算法自适应调节:
ηij(t)=ηij(t)⋅ψ=αFcosθdij⋅Nmax−NCNmax\eta_{ij}(t)=\eta_{ij}(t)\cdot\psi=\frac{\alpha^{F\cos\theta}}{d_{ij}}\cdot\frac{N_{\max}-N_C}{N_{\max}} ηij(t)=ηij(t)⋅ψ=dijαFcosθ⋅NmaxNmax−NC
势场算法优化
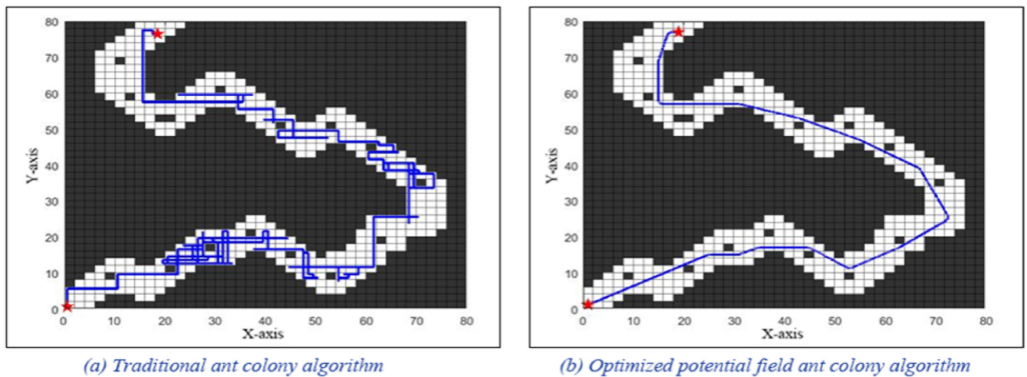
传统斥力函数曲率变化过快,易导致终点附近不可达。因此,本文将二次函数改为曲率更平缓指数函数,并引入改进斥力场:
UT=12k(x−xg)2U_T=\frac{1}{2}k\left(x-x_g\right)^2 UT=21k(x−xg)2
UO={12m(x−xg)2e−(x−xr)2,x−xr≤ρr0,x−xr>ρrU_O = \begin{cases} \frac{1}{2} m (x - x_g)^2 e^{-(x - x_r)^2}, & x - x_r \leq \rho_r \\ 0, & x - x_r > \rho_r \end{cases} UO={21m(x−xg)2e−(x−xr)2,0,x−xr≤ρrx−xr>ρr
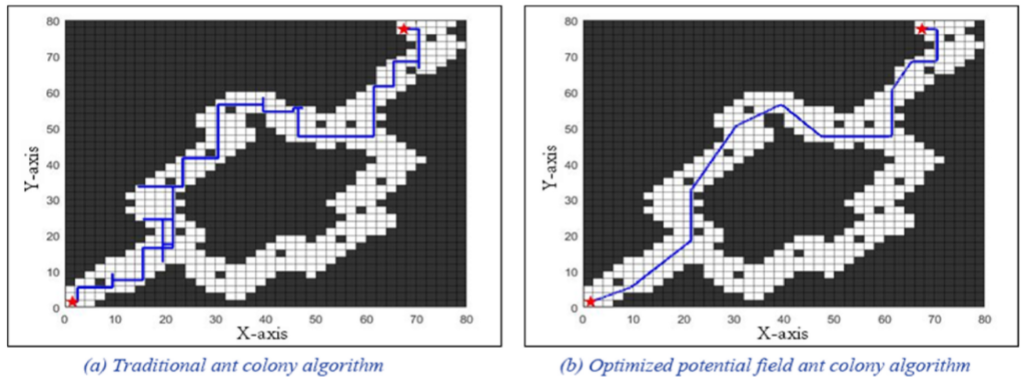
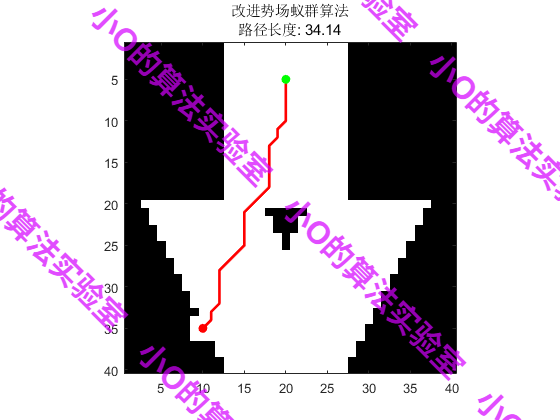
3.结果展示
4.参考文献
[1] Yuan P, Li Y, Cui J, et al. Optimal path planning and navigation platform development for unmanned surface vehicles in complex inland waterways using a potential ant-colony algorithm[J]. Ocean Engineering, 2025, 334: 121599.
5.代码获取
xx
6.算法辅导·应用定制·读者交流
xx