【嵌入式电机控制#进阶4】无感控制(二):观测器导论锁相环(全网最通俗易懂)
上一节我们提到一种基于实际测量反电动势的过零检测方法,但在低速(例如低速伺服)情况下,由于磁场在线圈内变化的速度较慢,所以感生电动势比较低,此时ADC测出反电动势波形会产生剧烈波动,导致过零点不可取。
今天带给大家一类专门应对低反电动势测量误差的高阶电机控制算法——观测器。
一、观测器
没有学过现控的同学刚接触这个东西可能感觉非常的陌生,我们平时只把控制算法的数学过程叫做控制器,那么观测器是什么东西?
举一个简单的工业控制例子,工厂中有一个不透明的单容水箱,一个进口,一个出口,设进出阀门开度为R1和R2,假设R1两端q1与q0的关系已知
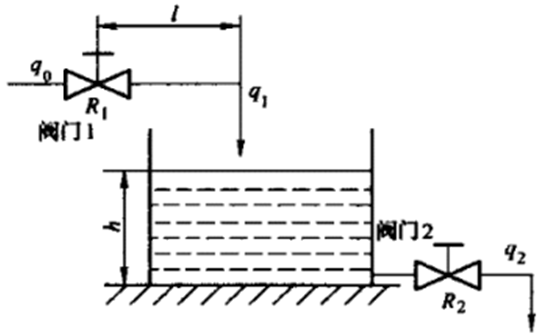
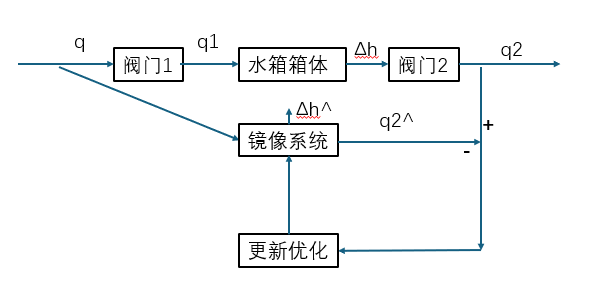
则根据过程控制,控制系统可被看作一阶惯性环节,空间状态方程为

化为传递函数:
![]()
由传递函数可以知道,水箱液位差Δh是一个中间变量,在现代控制理论中,我们可以把它称为单容水箱开环系统的状态。
问题:在不做任何除输出以外测量的情况下,我们如何获取系统的中间变量(状态)
思考方向:设计观测器
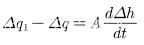
我们原始的开环系统如下图所示,Δh无法被直接测量

不妨这样想,我们可以创造一个”镜像“,让镜像中的系统模拟我们水箱开环的模型,这样通过分别给系统和系统“镜像”输入,他们都、会在形成输出的过程中分别产生一个中间变量Δh 和 Δh^ ,虽然Δh测不出来,但是Δh^具有一定的参考意义。
我们把这个“镜像”系统称为开环观测系统
但是这样就结束了吗,Δh^一定完全等同于Δh的大小吗?
在实际系统中,通常会存在一些扰动,这些扰动从空间状态方程中可以分为对状态的扰动和对输出的扰动。
(1)而对状态的扰动会直接影响我们Δh^的准确性,因为现实并没有镜像数学建模那么理想。
(2) 其次对输出的扰动会让现实系统与镜像状态难以产生足够强的因果性,因为现实系统输出和镜像系统输出不一定是完全相同的。
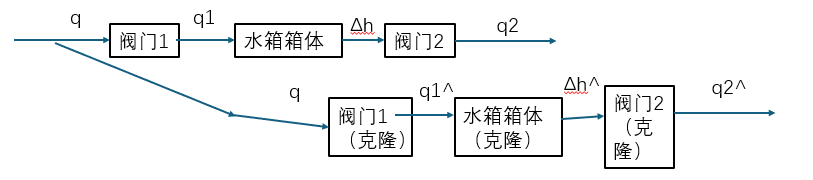
1. 基于输出误差反馈的观测系统
控制的核心是反馈,而提高观测精度的常用手段也是反馈。
工程上常用的观测反馈方式是基于输出误差反馈的观测系统,通过实际输出与镜像输出的误差,通过概率、统计学手段修正镜像系统,使镜像系统逐渐逼近真实系统。
这样,我们求得的状态将会大幅度贴合实际系统状态
卡尔曼滤波、龙伯格观测器、滑膜观测器都是控制工程中来基于误差反馈观测的优化模型。
这种优化模型我们称之为观测器(Observer),而包括输入、镜像系统、观测器、输出反馈的系统我们称之为闭环观测系统(Closed-loop Feedback Observe System)(通称观测系统)
2. 基于状态误差反馈的观测系统(略)
查阅过资料,理论性较强,工程性较弱,目前没有投入主流使用,省略
3. 系统状态能观性判据的通俗理解:第一次预测就要完全准确
回归主题:反电动势的观测(FOC/六步控制,下章详细展开)
1. 六步控制的一种反电动势观测方案
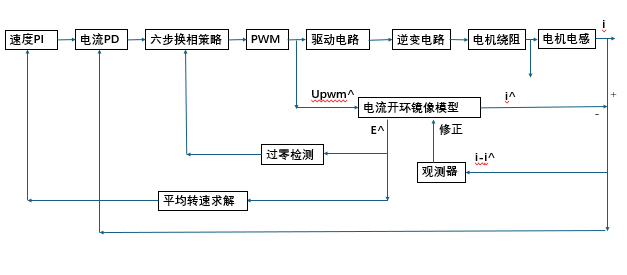
(电流反馈画错了,这里注意一下,反馈的是真实系统输出量,不是做差量)
注: 1. 六步控制可用相电压/电流值/Upwm值作为镜像模型的输入
2. 平均转速求解可采用 n = 60 / (p * Δt) /360
2. FOC反电动势观测方案
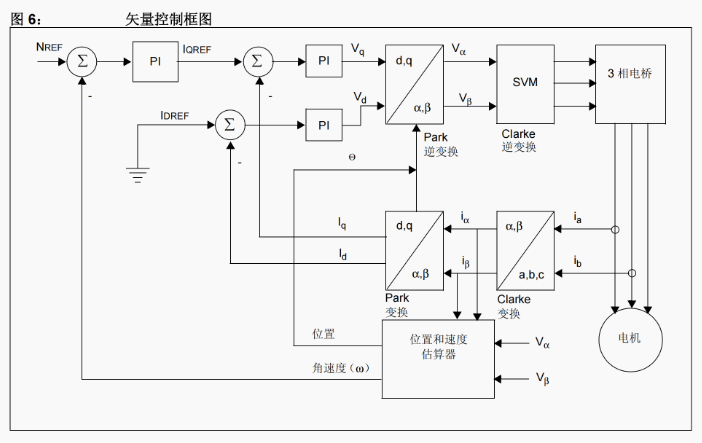
注:1. 真实/镜像系统输出经过克拉克变换整定后再参与做差(α-β轴上的电流值轴向固定,只有大小正负,也就是电角度180的区别)
2. 镜像系统输入需经过逆帕克变换整定后再输入镜像系统(dq轴在旋转,我们很难做单输入)
3. 位置计算方式各大团队都有不同的方法,STSDK惯用做法是只用单区间检测靠七段式去高频凑出三个类正弦的M型波(适合工业电机),此外还有厂家会用PLL算位置(下一条说)
4. 角速度计算方法除了时间差之外,还可以利用锁相环PLL
三、锁相环PLL
锁相环的结构如下图所示:
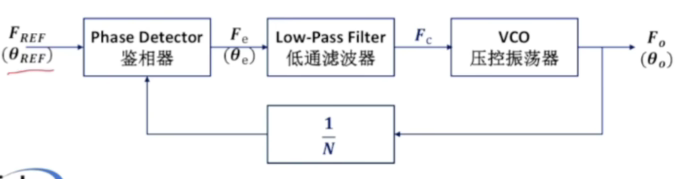
1. 鉴相器
其实就是一个减法器再带一个增益环节,
2. 低通滤波器
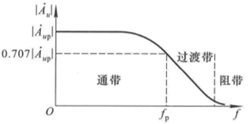
这里的低通滤波器并不是让相位为0,只不过是把相位信号中的高频成分过滤
3. 压控振荡器VCO
实现需求相位和相角的输出,具体原理不必深究,属于电子领域内容
系统输入波形与输出波形的关系为
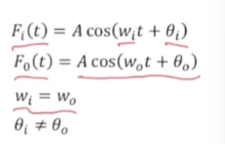
它的作用是把交流信号在频率保持的情况下进行移相。
总结
本章介绍了无感控制高级算法中涉及的基础概念,对于技术领域的人来说,没必要花大量时间去研究公式,而是把公式系统化框架化(这也是自动控制相关领域的学习特点)