自动驾驶的未来:多模态传感器钻机
伦敦大学学院博士生袁方正在建造多模态传感器钻机,以探索自动驾驶的未来。
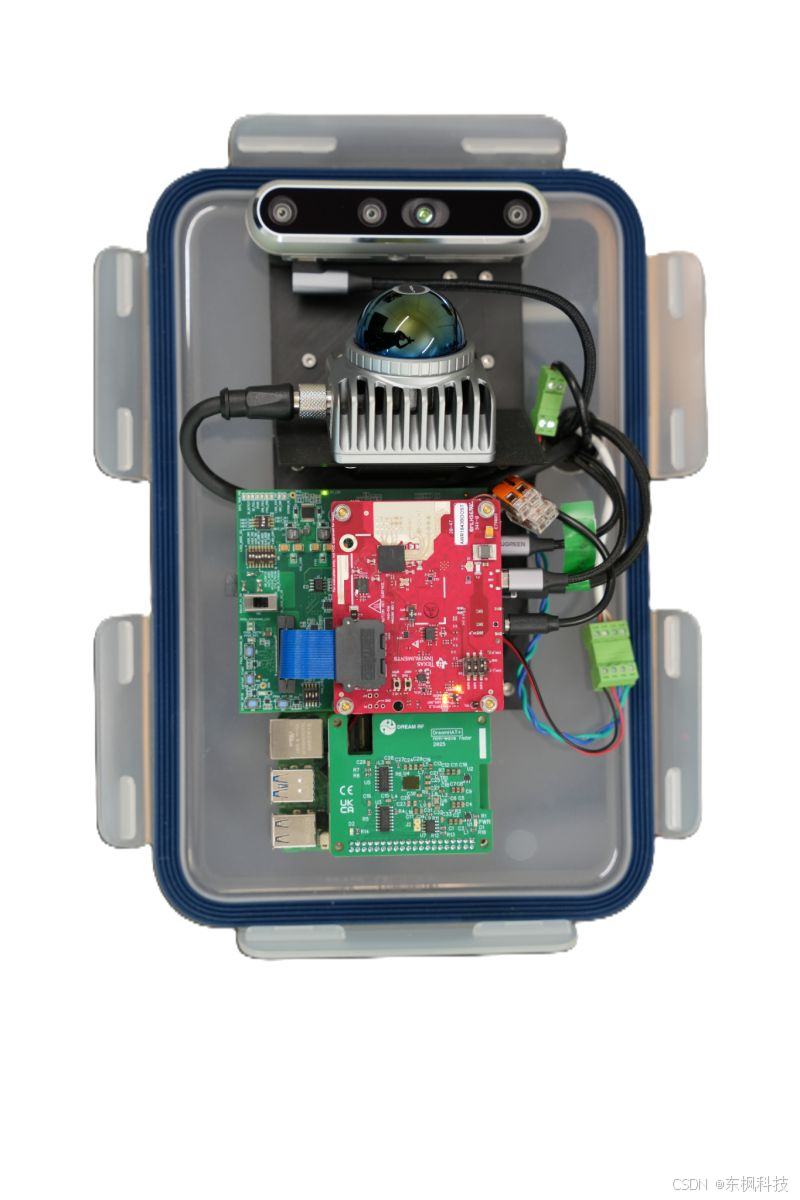
他的最新设置汇集了一套尖端传感器:
📡 60 GHz 雷达(用于 Raspberry Pi 的 DreamHAT+)DreamRF
📷 RGB 深度摄像头 (RealSense D455) 英特尔
🟢 3D 激光雷达 (MID-360) Livox Tech
📶 76–81 GHz 雷达 (AWR1843Boost) 德州仪器
这些多样化的传感模式将使我们能够研究数据融合技术,这些技术可以解锁更强大、更可靠的场景理解——尤其是在具有挑战性的驾驶环境中。
我们的想法是使用基于物理的仿真和深度学习的混合,从现有的 LiDAR 数据生成合成毫米波雷达信号。这种方法可以为缺乏雷达数据的自动驾驶数据集注入新的活力,扩大其实用性并加速以雷达为中心的感知研究。
这项工作强调了像 DreamHAT+ 这样的经济实惠的毫米波雷达如何与其他传感器集成,以探索智能交通领域的下一代应用。