基于FFT变换的雷达信号检测和参数估计matlab性能仿真
目录
1.算法仿真效果
2.算法涉及理论知识概要
3.MATLAB核心程序
4.完整算法代码文件获得
1.算法仿真效果
matlab2022a仿真结果如下(完整代码运行后无水印):
仿真操作步骤可参考程序配套的操作视频。
2.算法涉及理论知识概要
雷达系统由两个间距为 d 的接收天线组成,同时假设阵元孔径远远小于信号源与阵列中心之间的距离,也即 目标距离接收天线距离满足远区条件时则可认为由点辐射源发出的球面波可以视作平面波,此时两个天线的来波 方向差异非常小,可以近似相等为 θ ,但由于两天线位置不同,不同接收天线之间的波程存在差异,导致接收信号 的相位也存在差异,由此可以获得目标的角度、运动速度等的估计值。
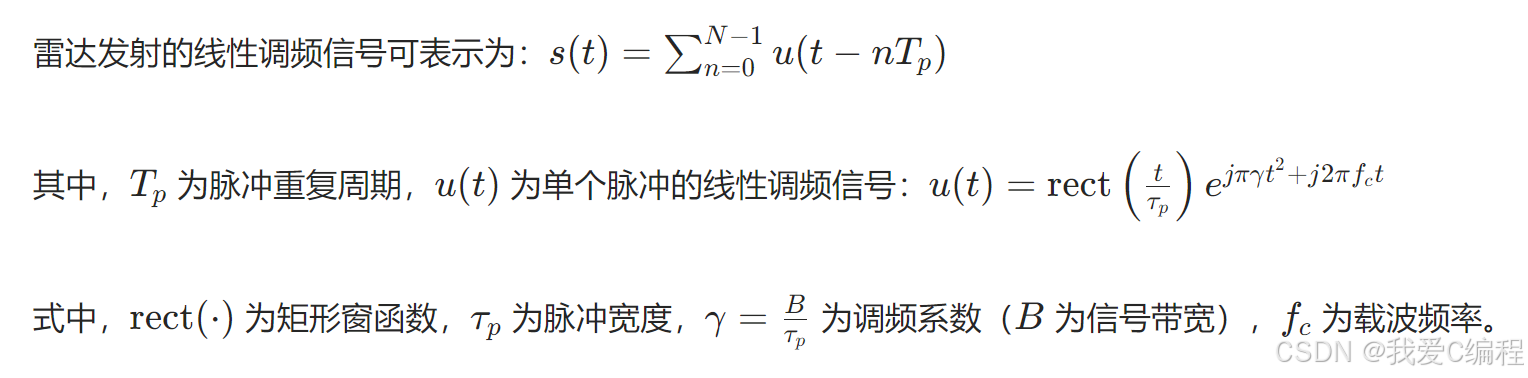
发射信号模型
接收信号模型
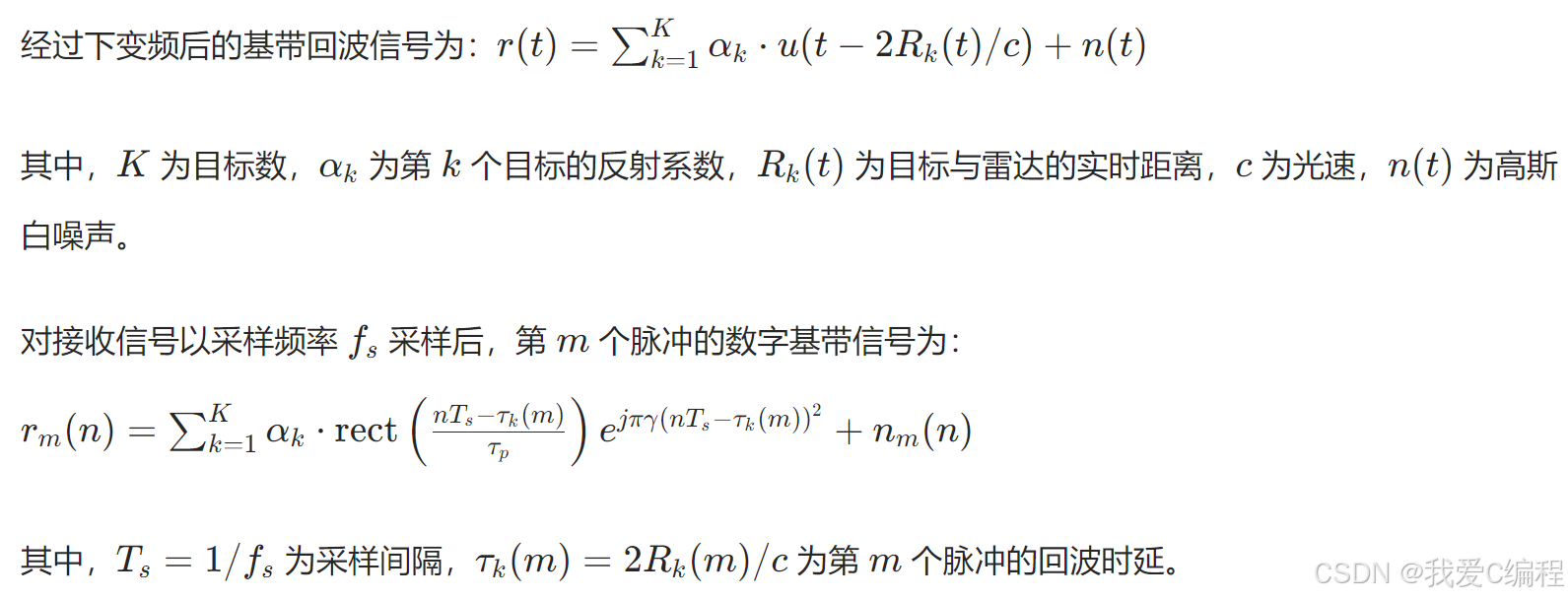
双天线互相关运算
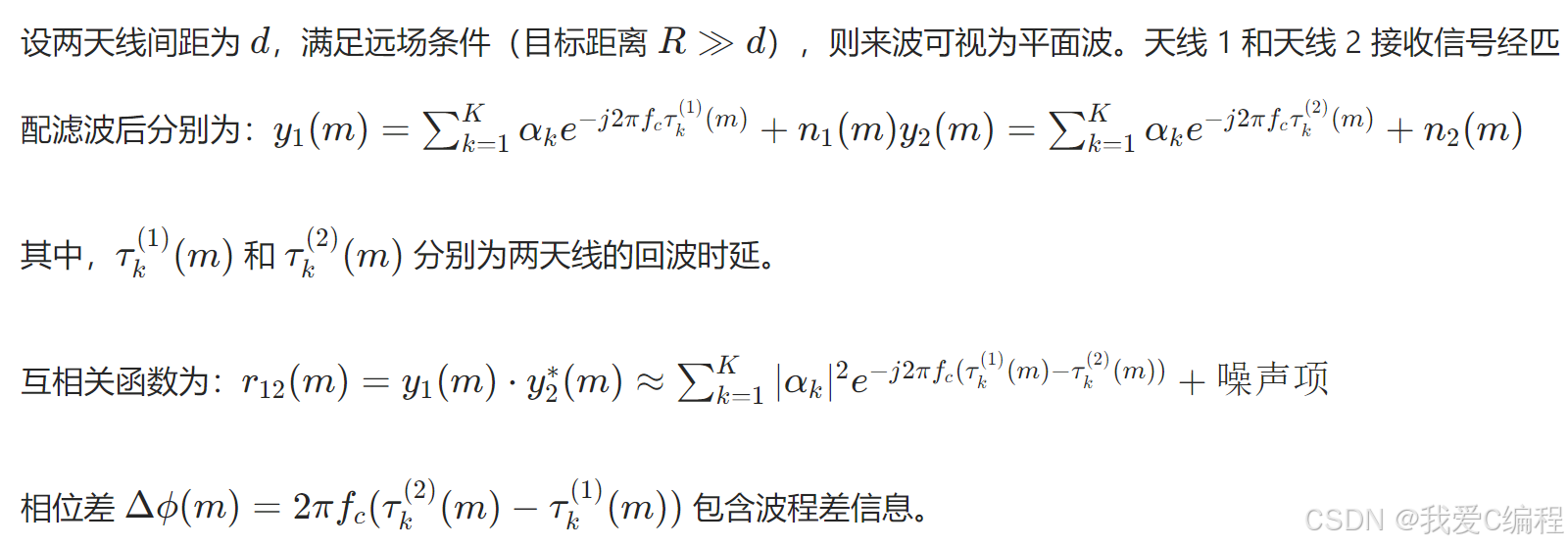
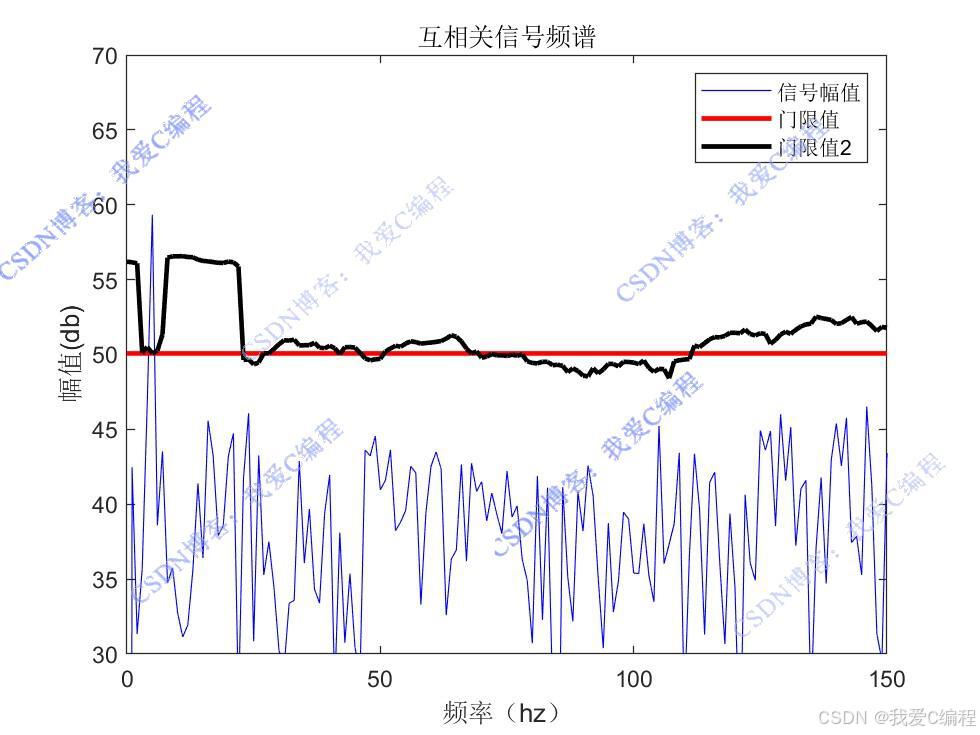
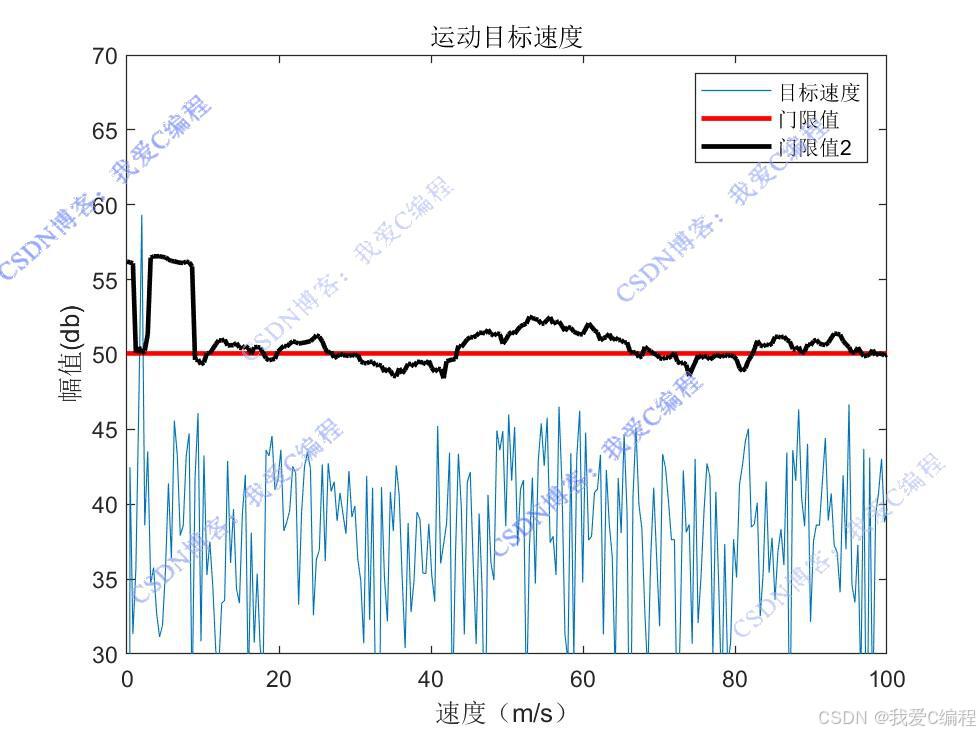
LFM雷达双天线系统的回波信号模型,通过互相关处理提取波程差相位信息,结合远场条件下的运动目标模型,建立了切向速度与多普勒频率的定量关系。该理论为雷达目标速度估计提供了关键算法支撑,可应用于多目标跟踪与成像系统设计。
3.MATLAB核心程序
...........................................................
%对比不同检测概率的仿真结果
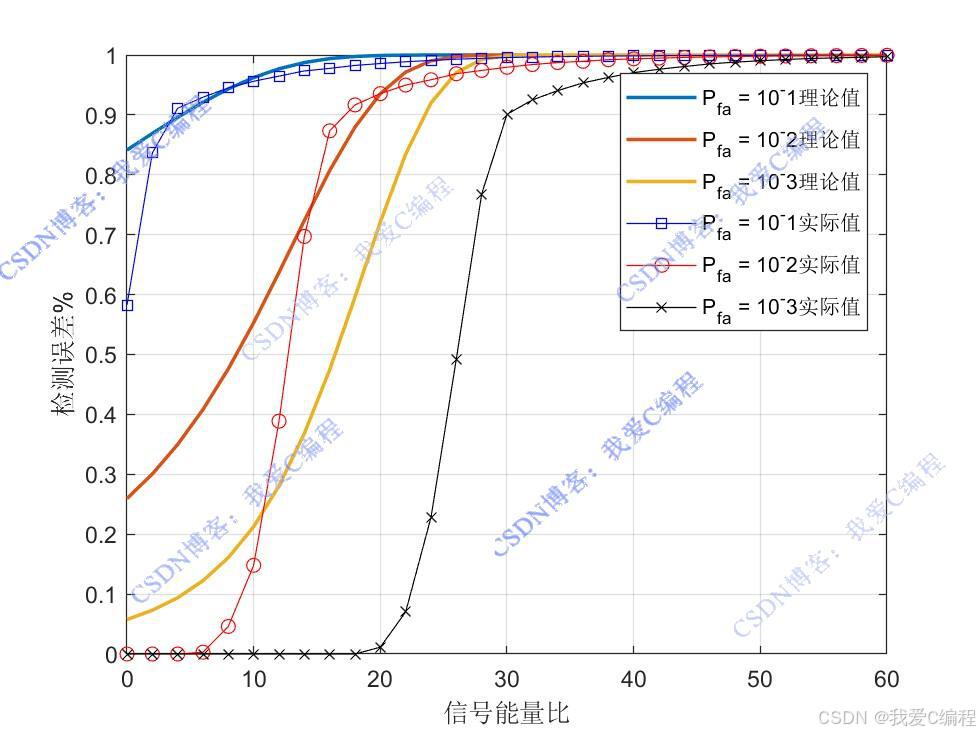
for p=1:length(Pfa)for q=1:length(ENR)Pd(p,q)=Q(Qinv((5*Pfa(p)))-sqrt(10^(ENR(q)/20)));%这个地方,和理论分析有点不一样,主要理论分析和实际还是有点差异的end
end
figure;
plot(ENR,Pd,'linewidth',1.5);
hold on
plot(ENR,mean(Aest2(1,:,:),3),'b-s');
hold on
plot(ENR,mean(Aest2(2,:,:),3),'r-o');
hold on
plot(ENR,mean(Aest2(3,:,:),3),'k-x');
grid on
legend('P_f_a = 10^-1理论值','P_f_a = 10^-2理论值','P_f_a = 10^-3理论值','P_f_a = 10^-1实际值','P_f_a = 10^-2实际值','P_f_a = 10^-3实际值');
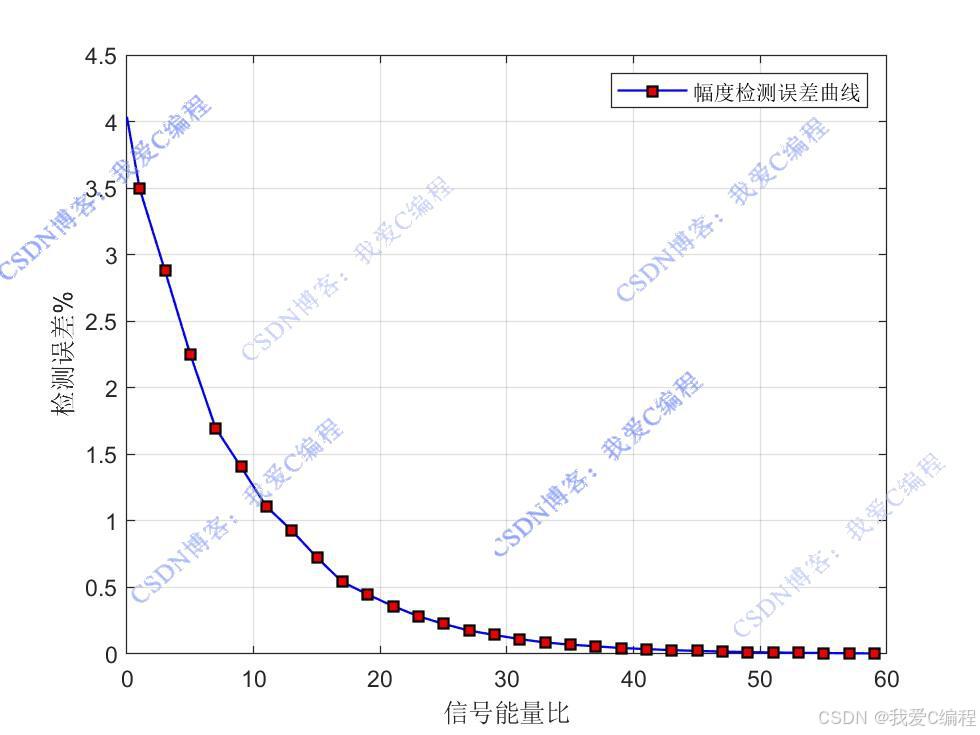
xlabel('信号能量比');
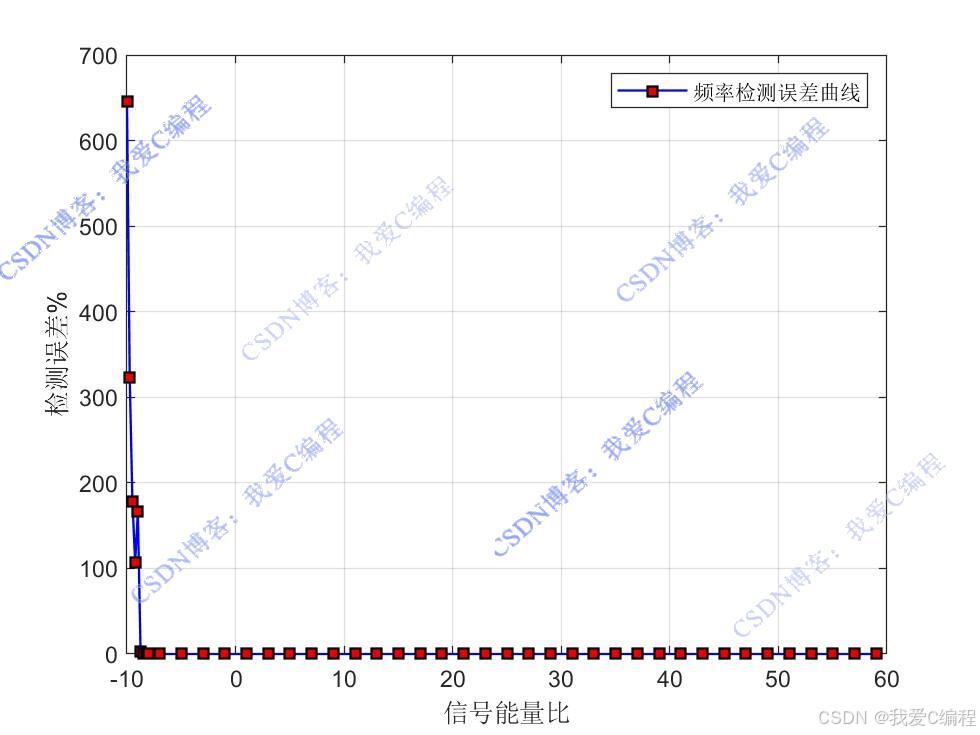
ylabel('检测误差%');figure;
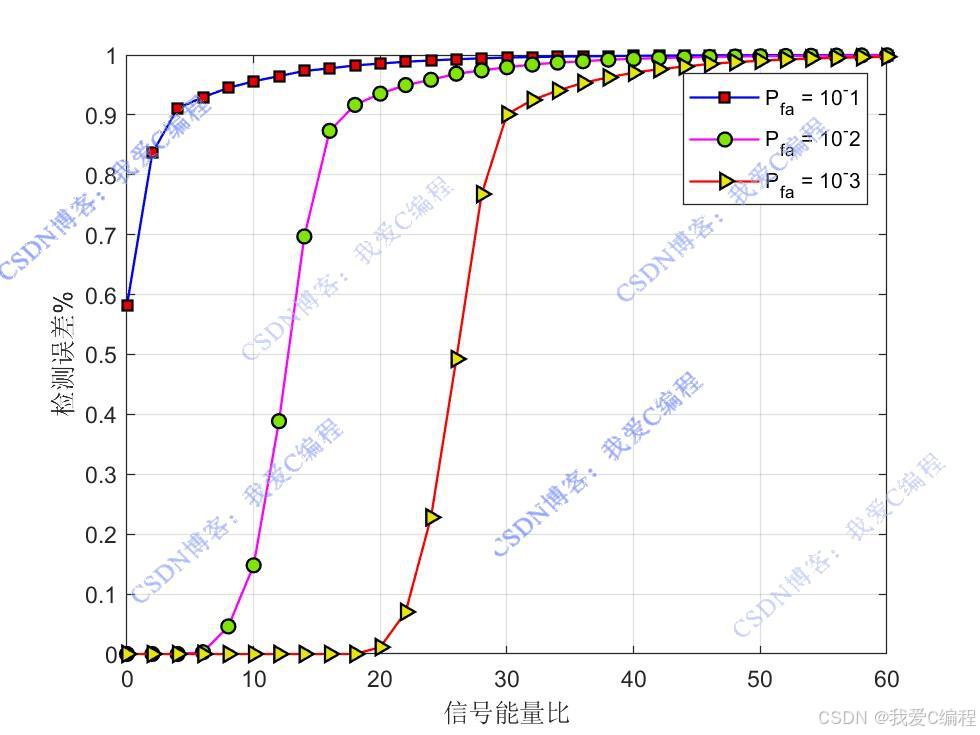
plot(ENR,mean(Aest2(1,:,:),3),'-bs',...'LineWidth',1,...'MarkerSize',6,...'MarkerEdgeColor','k',...'MarkerFaceColor',[0.9,0.0,0.0]);hold on
plot(ENR,mean(Aest2(2,:,:),3),'-mo',...'LineWidth',1,...'MarkerSize',6,...'MarkerEdgeColor','k',...'MarkerFaceColor',[0.5,0.9,0.0]);hold on
plot(ENR,mean(Aest2(3,:,:),3),'-r>',...'LineWidth',1,...'MarkerSize',6,...'MarkerEdgeColor','k',...'MarkerFaceColor',[0.9,0.9,0.0]);grid on
legend('P_f_a = 10^-1','P_f_a = 10^-2','P_f_a = 10^-3');
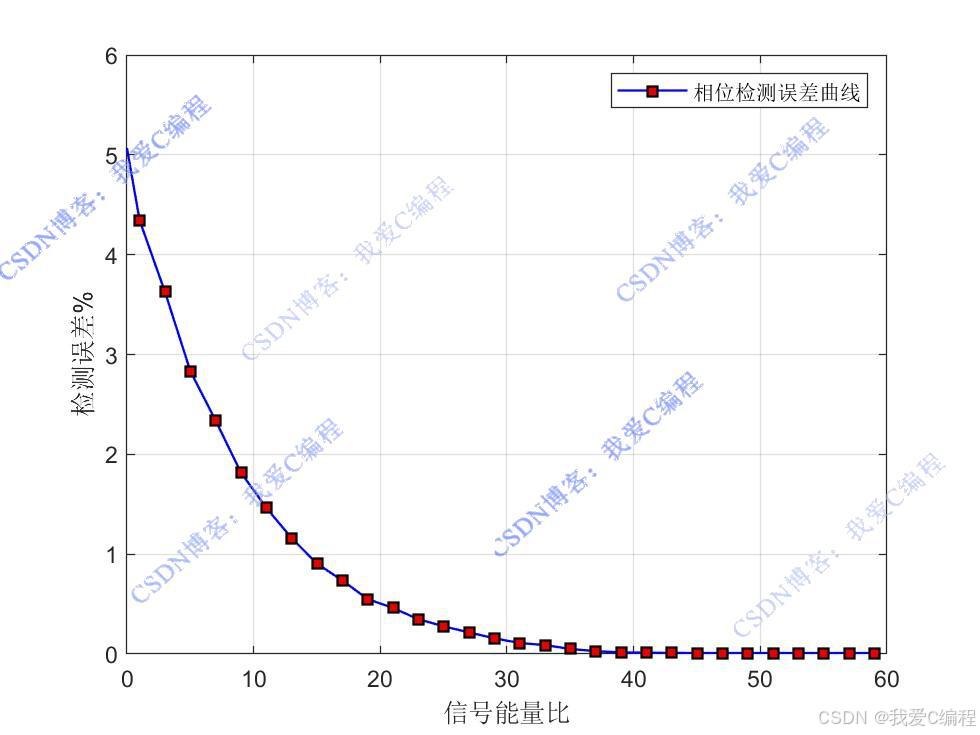
xlabel('信号能量比');
ylabel('检测误差%');save R50.mat
01_226m4.完整算法代码文件获得
V