正运动控制卡学习-点动
一.硬件介绍
使用正运动控制卡ECI1408进行学习,使用正运动函数库进行设置,并参考网络视频等进行学习记录,侵权删除.
二.轴连续运动
2.1.连接状态查询
在Motion类中定义连接状态验证
//验证轴卡是否连接成功
public OperationResult CommonInitedValited()
{//使用前面数据,InitedOk进行判断if (initedOk){return OperationResult.CreateSuccessResult();}else{OperationResult result = new OperationResult();result.IsSuccess = false;result.ErrorMsg = "轴卡没有连接初始化";return result;}}2.2.轴状态查询
验证轴状态,验证轴是否运动,采用正运动的控制函数进行验证
//验证轴状态是否OK,当轴运动时,则不能进行点动作业
public OperationResult CommonInitedValited(short axis)
{//验证卡是否连接IPOperationResult result=CommonInitedValited();//当轴卡连接失败时候if(!result.IsSucess) return result;
//判断轴是否运动if(IsMoving(axis)){ result.IsSuccess = false;result.ErrorMsg = "轴正在运行";return result;}return OperationResult.CreateSuccessResult();
}//定义轴运动函数
public bool IsMoving(short axis)
{//判断是否已经初始化OperationResult result = CommonInitedValidate(); if (!result.IsSuccess) return false;//根据正运动函数库,判断轴的状态时,返回值-1为停止状态,0运动中状态//首先定义轴运动状态,即轴为不运动状态int RunState=-1;//定义返回值int error=0;//对轴运动状态进行查看使用try{//对轴状态定义为引用类型,使用ref进行修饰int error=ZAux_Direct_GetIfIdle(IpHandle, axis, ref RunState);//对返回的代码进行验证ErrorHandler("ZAux_Direct_GetIfIdle", error)return RunState==0;}catch(Exception){return true;}}
//定义命令执行过程中错误代码private void ErrorHandler(string command, int error)
{string result = string.Empty;switch (error){case 0: break;default:result = string.Format("{0}" + "指令执行错误,错误码为{1}", command, error);break;}if (result.Length > 0){throw new Exception(result);}
}2.3.轴运动参数设定
单轴连续运动,根据正运动轴运动中中单轴点动函数设定轴运动相关参数,设置轴类型,脉冲当量,起始速度,加速度,减速度,根据以上内容创建轴运动函数
public OperationResult VMove(short axis, float vel, bool dir, float velMin, float acc, float dec, float sramp){// 判断是否满足运动条件var result = CommonMotionValidate(axis);if (!result.IsSuccess) return result;//创建错误码int error = 0;try{//设置轴类型/*Atype类型 描述0 虚拟轴。1 脉冲方向方式的步进或伺服 。2 模拟信号控制方式的伺服 。3 正交编码器 。4 步进+编码器 。6 脉冲方向方式的编码器,可用于手轮输入。7 脉冲方向方式步进或伺服+EZ信号输入。8 ZCAN扩展脉冲方向方式步进或伺服 。9 ZCAN扩展正交编码器。10 ZCAN扩展脉冲方向方式的编码器。*/error = zmcaux.ZAux_Direct_SetAtype(IPHandle, axis, 1);ErrorHandler("ZAux_Direct_SetAtype", error);//设置脉冲当量switch (axis){case 0:error = zmcaux.ZAux_Direct_SetUnits(IPHandle, axis, unit0);ErrorHandler("ZAux_Direct_SetUnits", error);break;case 1:error = zmcaux.ZAux_Direct_SetUnits(IPHandle, axis, unit1);ErrorHandler("ZAux_Direct_SetUnits", error);break;case 2:error = zmcaux.ZAux_Direct_SetUnits(IPHandle, axis, unit2);ErrorHandler("ZAux_Direct_SetUnits", error);break;case 3:error = zmcaux.ZAux_Direct_SetUnits(IPHandle, axis, unit3);ErrorHandler("ZAux_Direct_SetUnits", error);break;default:break;}//设置最小速度error = zmcaux.ZAux_Direct_SetLspeed(IPHandle, axis, velMin);ErrorHandler("ZAux_Direct_SetLspeed", error);//设置运行速度error = zmcaux.ZAux_Direct_SetSpeed(IPHandle, axis, vel);ErrorHandler("ZAux_Direct_SetSpeed", error);//设置加速度error = zmcaux.ZAux_Direct_SetAccel(IPHandle, axis, acc);ErrorHandler("ZAux_Direct_SetAccel", error);//设置减速度error = zmcaux.ZAux_Direct_SetDecel(IPHandle, axis, dec);ErrorHandler("ZAux_Direct_SetDecel", error);//设置S曲线error = zmcaux.ZAux_Direct_SetSramp(IPHandle, axis, sramp);ErrorHandler("ZAux_Direct_SetSramp", error);//设置方向并运动error = zmcaux.ZAux_Direct_Single_Vmove(IPHandle, axis, dir ? 1 : -1);ErrorHandler("ZAux_Direct_Single_Vmove", error);}catch (Exception ex){result.IsSuccess = false;result.ErrorMsg = ex.Message;return result;}return OperationResult.CreateSuccessResult();}
//轴停止
public OperationResult StopAxis(short axis)
{//第一步:验证是否连接板卡OperationResult result = CommonInitedValidate();if (!result.IsSuccess) return result;try{int error = ZAux_Direct_Single_Cancel(IPHandle, axis, 2);return OperationResult.CreateSuccessResult();}catch (Exception e){result.IsSuccess = false;result.ErrorMsg = e.Message;return result;}
}三.GUI实现
3.1.创建GUI界面
3.2.创建鼠标事件
private void btn_Jog_MouseDown(object sender, MouseEventArgs e)
{if (sender is Button btn){if (btn.Tag != null && btn.Tag.ToString().Length > 0){if (btn.Tag.ToString().Contains(';')){string[] values = btn.Tag.ToString().Split(';');if (values.Length == 2){//获取到轴号short axis = Convert.ToInt16(values[0]);//获取到方向bool dir = values[1] == "1";//获取设置的参数SetParam();var result = motion.VMove(axis, velMax, dir, velMin, acc, dec, sramp);if (result.IsSuccess == false){MessageBox.Show("点动失败:" + result.ErrorMsg, "点动失败");}}}}}
}
private void btn_Jog_MouseUp(object sender, MouseEventArgs e)
{if (sender is Button btn){if (btn.Tag != null && btn.Tag.ToString().Length > 0){if (btn.Tag.ToString().Contains(';')){string[] values = btn.Tag.ToString().Split(';');if (values.Length == 2){//获取到轴号short axis = Convert.ToInt16(values[0]);var result= motion.StopAxis(axis);//获取设置的参数 if (result.IsSuccess == false){MessageBox.Show("点动失败:" + result.ErrorMsg, "点动失败");}}}}}
}
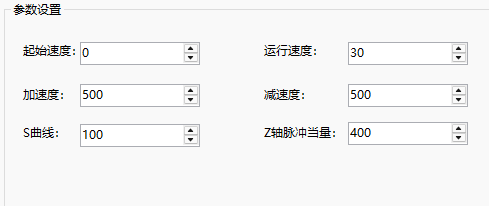
private void SetParam()
{velMax = Convert.ToSingle(this.num_velmax.Value);velMin = Convert.ToSingle(this.num_velmin.Value);acc = Convert.ToSingle(this.num_acc.Value);dec = Convert.ToSingle(this.num_dec.Value);sramp = Convert.ToSingle(this.num_sramp.Value);zcreep = Convert.ToSingle(this.num_creepZ.Value);zhomedis = Convert.ToSingle(this.num_homeDisZ.Value);motion.unit0 = Convert.ToInt32(this.num_unit0.Value);}点击按钮实现运动效果