两轮车车机 OS 演进路线深度解析
随着电动自行车、电动摩托车的智能化升级,车机系统(Head-Unit)的操作系统选择,正成为行业的重要议题。是继续维持轻量化的 RTOS,还是转向 Linux/Android?本文将从应用场景、技术特点、市场趋势几个维度,梳理两轮车车机的 OS 演进路线图。
1. RTOS 方案(传统/入门级)
应用场景
入门级电动车/电动自行车,功能仅限于速度、电量显示、蓝牙通信、简单导航箭头提示。优势
启动快、占用资源极少、功耗低,硬件成本控制在几十元 MCU 上即可。劣势
扩展性差,难以支持全屏地图投屏、多媒体、语音交互等复杂功能;生态封闭,OTA 升级有限。趋势
仍会在 低端、价格敏感型车型中长期存在,例如共享电动车、乡镇市场机型。
2. Linux 方案(中端过渡)
应用场景
适用于配备彩色 TFT 仪表的车型,支持地图投屏、语音播报、OTA 升级。优势
Linux 内核成熟,驱动和外设支持丰富(蓝牙、Wi-Fi、4G),可直接运行高德/百度地图 SDK;安全稳定性优于 Android。劣势
缺乏 Android 完整生态,交互体验受限;对硬件要求较高,功耗大。趋势
目前主流中高端车型(九号、小牛、雅迪等)大多采用 Linux + Qt/GTK UI 框架,属于智能车机的过渡形态。
3. Android 方案(高端/未来方向)
应用场景
高端电动摩托车、大屏仪表(5~10 寸),支持 CarPlay / Android Auto / 华为 HiCar,甚至直接运行高德/百度导航 App。优势
应用生态丰富(导航、音乐、语音助手等),开发工具成熟,体验接近汽车中控;更利于与 IoT、车联网融合。劣势
功耗与性能需求高,需要更强的 SoC(高通、全志、TI 等车规芯片);启动时间慢,安全性和维护成本较高。趋势
高端旗舰机型逐步转向 Android 化,就像汽车领域的 Android Automotive。随着 CarPlay/HiCar 渗透两轮车,Android 将更有优势承接。
4. 芯片平台与成本对照表
为了更直观地理解不同 OS 的定位,这里整理一张 典型 SoC 平台对照表:
| OS 类型 | 常见 SoC 架构 | 特点与功能范围 | 大致 BOM 成本区间 |
|---|---|---|---|
| RTOS | Cortex-M0 / M3 / M4 / M7 | MCU 等级,低功耗,驱动段码屏/小 LCD,支持 BLE、基础 OTA | ¥20–50 RMB |
| Linux | Cortex-A7 / A9 / A17 / A53 | 运行裁剪版 Linux + Qt/GTK UI,支持 TFT 彩屏、蓝牙/Wi-Fi/4G、地图 SDK | ¥80–200 RMB |
| Android | Qualcomm Snapdragon、TI Jacinto、全志 A 系列等 | 完整 Android 生态,支持 CarPlay/AA/HiCar,语音助手、多媒体应用 | ¥300 RMB 以上 |
说明:这里的 BOM 成本仅为芯片+基础存储/电源的级别估算,未包含整车屏幕、模组、散热等周边成本,仅供参考。
5. 总结与预测
低端车型:继续保持 RTOS,成本最低,功能简单。
中端车型:Linux 主流,结合地图 SDK 提供投屏和导航能力。
高端车型:逐步转向 Android,甚至可能出现“两轮版 Android Automotive”。
长远趋势:智能化升级不可逆,Android 化是最终趋势,但短期 Linux + SDK 会占据量产市场。
6. 演进路线图
下面给出一张更直观的演进路线图,展示 RTOS → Linux → Android 的技术演变路径:
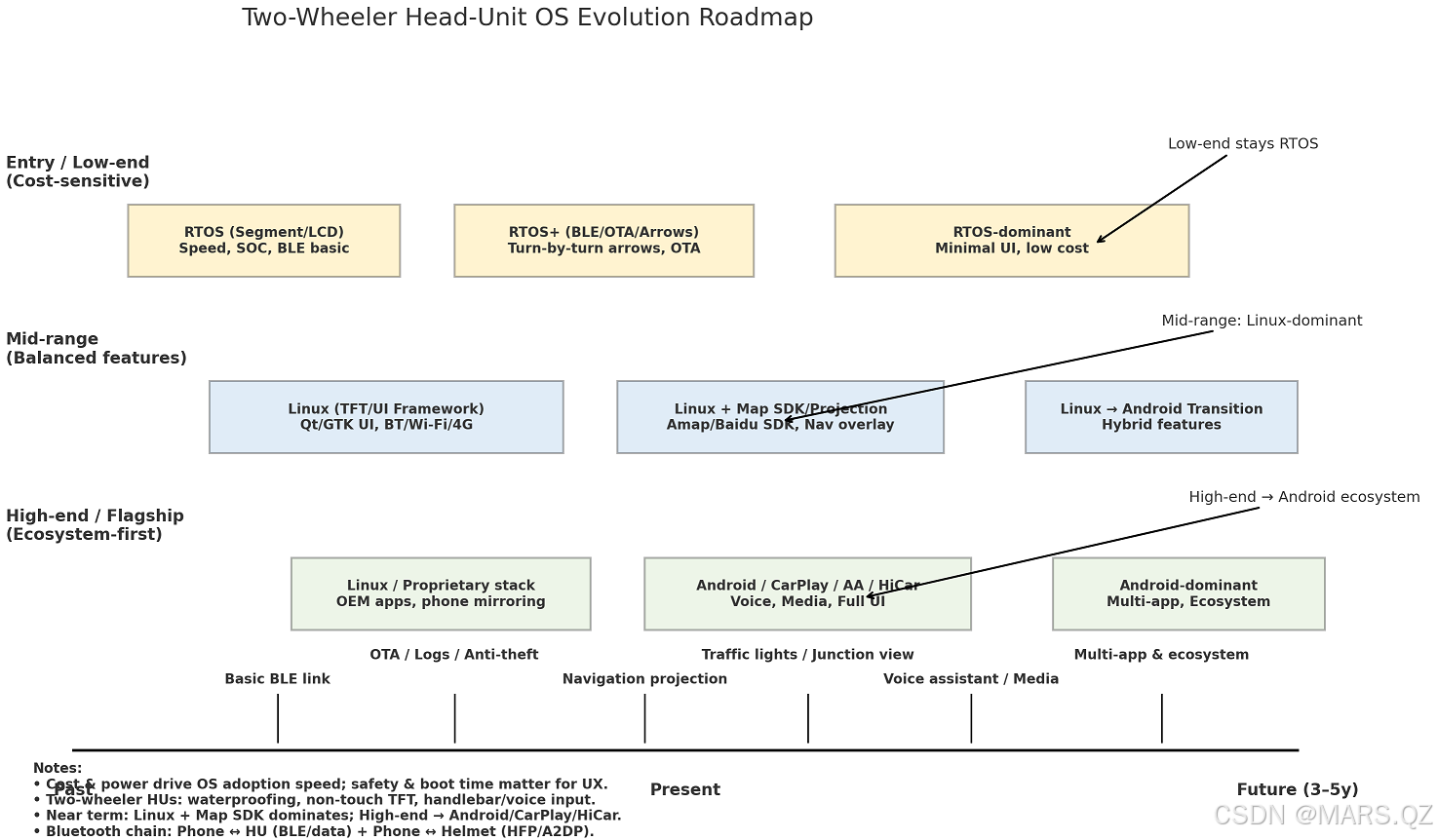
7. 结语
两轮车车机 OS 的选择,本质上是 成本、功能、安全、生态的权衡:
RTOS 保守但稳定,适合低端。
Linux 实用且均衡,是当下主流。
Android 丰富而开放,将引领未来高端。
随着车联网、V2X、AR HUD 等技术成熟,未来两轮车车机将不仅是“导航屏幕”,而是完整的 智能骑行中枢。